

Навигационное обеспечение работ должно обеспечивать пространственную привязку измеряемых параметров получаемой информации. Для гидролокационных средств это означает, что каждая точка маршрута, на котором производилось измерение глубины, мощности осадочных отложений, либо лоцировались объекты, должна быть привязана к географической или местной системе координат. Под точкой, координаты которой должны измеряться, понимается место нахождения гидроакустической антенны прибора, которая производит излучение акустических зондирующих импульсов, а также прием и преобразование эхо-сигналов.
Для определения географических координат судов и прочих плавсредств, ведущих обследование подводных объектов и дна акваторий с помощью гидролокационных средств, в настоящее время используются спутниковые (космические) радионавигационные системы (СРНС или КНС). Для определения местоположения антенн приборов, расположенных на подводных носителях, используются гидроакустические навигационные системы (ГАНС). В случае, когда необходима привязка места подводных носителей к географическим координатам, используется комбинация ГАНС и КНС. Применение этих систем позволяет полностью автоматизировать процесс сбора информации о местоположении плавсредства или гидролокационного прибора и синхронизировать его с процессом сбора гидролокационной информации.
Для определения местоположения подводных буксируемых носителей относительно судна-буксировщика в ряде случаев используются теоретические модели конфигурации буксирной линии [2]. Для применения этих моделей необходимо знание характеристик обтекаемости и параметров состояния коренного и буксирного концов буксирного кабель-троса. К этим параметрам относятся: сила натяжения кабель-троса, длина вытравленного кабель-троса, углы схода кабель-троса с буксирного рола в двух плоскостях, курсовой угол и скорость движения судна, масса буксируемого носителя, а при высоких скоростях буксировки – его гидродинамические характеристики. Очевидно, что для реализации такой системы определения положения буксируемого носителя необходима сложная система сбора информации с множеством датчиков, методиками и программами их тарировки. В ряде случаев, особенно для коротких буксирных линий (шельф, мелководье) и небольших требуемых точностях определений, применимы упрощенные модели или простые соотношения для расчета местоположения подводного носителя.
При отсутствии космических и гидроакустических средств навигационного обеспечения работ с буксируемыми аппаратами и гидролокационными приборами используются традиционные средства и методы координирования: а) засечки радиолокатором опорной цели (буя); б) радионавигационные системы; в) пара теодолитов; г) квантовый теодолит-дальномер; д) временные засечки при проходе створов; е) координирование подводного носителя по данным о конфигурации буксирной линии. Как правило, использование этих методов связано с такими условиями проведения исследований, при которых использование КНС невозможно (например, отсутствие открытого неба).
Проводка судна по заданной сетке галсов и определение его местоположения в ходе гидролокационной съемки с помощью судового радиолокатора широко использовалась во времена отсутствия КНС. На акватории устанавливался заякоренный буй с уголковым отражателем. Для определения географических координат буя судно обеспечения некоторое время (иногда более суток) дрейфовало в непосредственной близости от буя и производились определения его местоположения с помощью астрономических методов и появившихся в то время первых низкоточных космических систем. Полученные данные усреднялись, и среднее значение координат принималось за значение географических координат точки нахождения буя. В отдельных случаях на полигонах выставлялось до 10 буев. Для определения местоположения судна в ходе работ с помощью судового радиолокатора и компаса определялся пеленг на буй и расстояние до него. По известным координатам буя, расстояния и пеленгу рассчитывались координаты местоположения судна.
Локальные радионавигационные системы используются вблизи берега и включают два и более приемоответчиков, судовую аппаратуру запроса и приема сигналов ответа. Приемоответчики устанавливаются на берегу. Место их установки привязывается геодезическими методами к географическим координатам. В ходе работ судовой запросчик излучает в эфир радиосигнал запроса, в ответ на который береговые приемоответчики излучают сигналы ответа, каждый своим кодом. Судовой приемник принимает сигналы ответа береговых приемоответчиков, распределяет их по каналам и по времени распространения сигналов от судна до береговых приемоответчиков и рассчитывает дистанцию от судна до каждого из приемоответчиков. На основании знания координат каждого из приемоответчиков и их дистанций до судна рассчитываются координаты местоположения судна. Такие системы наряду с высокой точностью имели и высокую стоимость, поэтому нашли применение только для оборудования стационарных полигонов и сложных фарватеров.
Высокая точность определения местоположения плавсредства вблизи берега может быть обеспечена использованием пары теодолитов, установленных на известной базе, привязанной к геодезическим реперам, либо к местной системе координат. В момент обсервации оператор с судна дает команду теодолитным постам на проведение измерений. Команда подается по радио, либо путем отмашки сигнальным флагом. При подаче команды оператор фиксирует время и номер точки обсервации. Геодезисты на теодолитных постах по команде с судна производят измерение углов пеленга на судно относительно базы теодолитных постов и фиксируют их в журнале с номером измерения. После окончания работ данные измерения углов совмещаются по номерам измерений и времени. Для каждого измерения по двум углам и базе рассчитываются координаты судна, привязанные ко времени.
Более производительным и удобным, но менее точным, является способ измерения координат плавсредства с помощью квантового теодолита-дальномера. Дальномер этого теодолита работает на принципе локации объекта импульсным лазером. Импульс лазерного излучения распространяется до визируемого теодолитом объекта (любого плавсредства, включая корабль), отражается от него в обратном направлении и принимается специальным фотоэлементом. По времени распространения импульса лазерного излучения определяется расстояние до плавсредства, а с помощью теодолитной системы измеряется угол визирования судна относительно выбранного направления. Расстояние и угол вместе со временем фиксируются в журнале наблюдений оператором. По известным координатам места установки теодолита-дальномера, углу пеленга судна и расстояния до него рассчитывается местоположение судна на маршруте в привязке ко времени.
Существуют другие решения, дополняющие теодолит каналом измерения дальности до объекта, например радиоустройством «запрос-ответ». При проведении съемок с требуемыми точностями (<1 м) с помощью гидролокационной аппаратуры теодолит-дальномер становится конкурентоспособным по сравнению с субметровыми DGPS системами.
При съемках вдоль фарватера судоходных рек, а также при съемках вдоль протяженных инженерных сооружений, имеющих инженерную разметку, иногда используется способ навигационного обеспечения путем засечки времени прохода береговых реперов, находящихся на траверсе движения судна.
В настоящее время область навигационного обеспечения гидролокационных исследований полностью монополизирована космическими системами GPS/DGPS и ГЛОНАСС. Только в области локальных точных инженерных исследований с ними могут конкурировать теодолиты-дальномеры.
Для определения местоположения подводных объектов, технических средств и аппаратов в основном используются гидроакустические навигационные системы (ГАНС). Долговременные полигоны оборудуются ГАНС с длинной базой. При работах на протяженных маршрутах, связанных с геологическими изысканиями на маршрутах планируемой прокладки подводных трубопроводов и кабелей, используются ГАНС с ультракороткой базой (УКБ). Эти системы не требуют установки и привязки к географическим координатам донных маяков-ответчиков. В ряде работ [2, 3] теоретически обосновывается возможность определения местоположения буксируемых ПА относительно судна-буксировщика расчетным путем, исходя из параметров состояния буксирной линии, положения судна-буксировщика и общих параметров процесса буксировки. Такой способ удобен при работах с неспециализированных судов [1]. Недостатком этого способа является не столь высокая точность, какую, к примеру, обеспечивают ГАНС, однако практика показывает, что подавляющее число работ по обследованию дна с помощью ГБО, в том числе поисковых, за исключением детальных батиметрических промеров, не требуют большой точности, обеспечиваемой лишь ГАНС с длинной базой. Применение рассматриваемой методики при обследовании затонувшей АПЛ «Комсомолец» (глубина 1500м) летом 1991 года с помощью глубоководного буксируемого аппарата (ГБА) «Звук-Л» с борта НИС «Мстислав Келдыш» позволило со второй попытки вывести ГБА на объект в пределах дальности 50 м [4].
Разработанная методика представляет собой достаточно простой способ определения местоположения буксируемого подводного аппарата (ПА) расчетным путем, исходя из параметров состояния буксирного кабель-троса. Основным предположением расчета является то, что ПА и судно перемещаются по параллельным траекториям, что справедливо для случая равномерного устойчивого движения системы «ПА + судно» на прямолинейных галсах. Для расчета используются данные, получаемые с помощью штатных устройств ПА, судна и специализированных устройств, предназначенных для определения параметров состояния кабель-троса. С помощью судовых устройств (компас, гирокомпас и GPS) определяется курсовой угол (ориентация) корабля (Фкк), по серии обсерваций – значение угла путевого курса (Фпк). С помощью глубомера определяется глубина (Н) погружения буксируемого ПА. При незначительных перепадах глубин в районе работ Н может определяться, исходя из данных батиметрии района и расстояния ПА от грунта. При буксировках ПА вблизи дна, когда расстояние аппарата до дна существенно меньше глубины места, можно считать Н равной глубине места. К измеряемым параметрам состояния корабельной буксирной линии (рис. 1) относятся её длина L и угол её схода с буксирного рола в горизонтальной плоскости – Фкб. Длина L определяется по показанию датчика вытравленного троса буксирной лебедки. При работах на небольших глубинах с небольшими длинами буксирной линии можно использовать кабель-трос, размеченный по длине марками. Измерение Фкб представляет собой наибольшую сложность. При отсутствии специальных датчиков, величина Фкб может оцениваться визуально с использованием угломерных устройств типа астролябии или теодолита. Важно, что измерение перечисленных параметров при установившемся движении системы «ПА + судно» требуется производить не более 2–3 раз на одном галсе, что в свою очередь не требует обязательной автоматизации измерений.
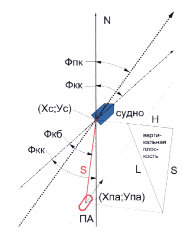
Схема для упрощенного расчета местоположения подводного буксируемого аппарата относительно судна по параметрам состояния буксирного кабель-троса
Местоположение ПА (Хпа; Упа) определяется на основе данных о местоположении судна буксировщика (Хс;Ус) с введением поправки. Поправка (см. рис. 1) содержит две составляющие: S – проекция буксирной линии на горизонтальную плоскость, величина которой рассчитывается по формуле
 (1)
(1)
и (Фкк – Фкб) – угол между курсовым углом корабля, направленным на север, и отрезком S. При этом угол Фкб, отсчитываемый от продольной оси судна в сторону правого борта, имеет знак «минус», а в сторону левого борта – знак «плюс». Выражения для расчета искомых координат ПА будут иметь вид:
Хпа = Хс – S sin(Фкк – Фкб) (2)
Упа = Ус – S cos(Фкк – Фкб) (3)
При геолого-геоморфологических исследованиях рельефа, включая картирование границ природных объектов, поиск крупных затонувших объектов (судов, самолетов) и, следовательно, при возможных скоростях буксировки (более 5 узлов) на шельфе и мелководье, если не требуется существенное заглубление носителя антенн ГБО, можно принять: S = L, Фкб = 0, Фкк = Фпк. Тогда выражения (2 и 3) примут вид:
Хпа = Хс – L sin(Фпк); (4)
Упа = Ус – L cos(Фпк). (5)
Процесс автоматизированного введения поправки в соответствии с этими выражениями очевиден. L есть величина, которая в принятых упрощающих условиях неизменна, а Фпк рассчитывается по координатам точек обсерваций, поступающих, как правило, в цифровом виде от приемника GPS (DGPS).
Предложенный способ и полученные уравнения легко могут быть использованы в среде навигационных программных продуктов реального времени и постобработки гидролокационной информации для локализации местоположения подводных объектов. Таким образом, среди традиционных средств координирования плавсредств и подводных носителей можно использовать координирование подводного носителя по данным о конфигурации буксирной линии.
При измерении глубины места, а также глубин залегания отражающих границ слоев грунта с помощью эхолотов, батиметрических гидролокаторов и акустических профилографов встает задача привязки этих измерений в вертикальной плоскости. Проще говоря, выбор точки отсчета глубин. Кроме того, при измерении глубин следует учитывать изменение уровня воды в водоемах в течение проведения промерных работ. Эти изменения связаны с приливно-отливными процессами, нагонными явлениями и регулируемым стоком в бассейнах рек.
В системе внутренних водоемов России за ноль отсчета высот зеркала воды принят ноль Кронштадтского футштока, а система измерений высот называется Балтийской. На большинстве судоходных водоемов имеются водомерные посты, проводящие круглогодичные измерения уровня зеркала воды в Балтийской системе. На реках всегда известен наклон уровня зеркала воды между водомерными постами, и измерения уровня пересчитываются в любую точку участка. При проведении инженерных исследований в морских прибрежных зонах при строительстве дамб, дюкеров, причальных и других сооружений также используется Балтийская система.
В открытом море при исследовании рельефа основной задачей является учет изменения уровня поверхности воды в процессе промера. Такая же задача возникает при промерных работах на всех водоемах, где возможны короткопериодные колебания уровня зеркала воды. При работах вблизи берега для измерений колебаний уровня воды устраиваются временные водомерные посты. Условно водомерный пост представляет собой размеченную в сантиметрах по вертикали рейку, забитую в дно. Инженерные сооружения часто оборудуются водомерными рейками. Такие рейки устанавливаются на опорах мостов, головках пирсов и причальных стенках. Значения уровня (абсолютные или относительные) вписываются в журнал наблюдений и используются для коррекции результатов промера. В открытом море для измерения колебаний уровня применяются автономные устройства, представляющие собой датчик давления, показания которого преобразуются в цифровой код и записываются во флэш-память. Такое устройство, называемое цифровым мареографом, устанавливается в районе работ на дне (при глубинах до 10–20 м) либо на притопленном буе (при значительной глубине места) и ведет непрерывную запись величины гидростатического давления. После окончания работ мареограф поднимается и накопленные им данные считываются в ПЭВМ. По этим данным рассчитывается и строится кривая колебания уровня поверхности моря за время работ. Эти данные далее используются для приведения данных промера глубин к единому горизонту отсчета.
Кроме учета колебаний уровня поверхности воды в водоеме, при исследовании рельефа необходимо учитывать заглубление антенны гидролокационного прибора. В случае жесткого крепления антенны к борту плавсредства это не представляет труда и реализуется путем разметки крепежной штанги антенны. При буксировке антенн измерение глубины их носителя осуществляется двумя основными способами: а) путем установки на буксируемый носитель датчика гидростатического давления, показания которого передаются в судовую часть гидролокационной аппаратуры по кабель-тросу и там отображаются, регистрируются и накапливаются, а далее используются при обработке данных промера; б) путем установки на носителе дополнительной антенны эхолота, характеристика которой развернута вверх. Информация, поступающая от такого вверх направленного эхолота, регистрируется также как и информация, поступающая от обыкновенного эхолота. Часто функцию такого эхолота может выполнять ГБО, боковой лепесток антенны которого направлен вверх. Выбор того или иного способа зависит от точностных требований к проведению работ. Использование первого способа дает большую точность.
Заключение
Космические навигационные системы являются основными средствами определения местоположения надводных плавсредств и реперов, обеспечивающих исследования дна акваторий и подводных объектов гидролокационными методами. Местоположение подводных аппаратов-носителей гидролокационной аппаратуры достаточно точно определяется с помощью гидроакустических навигационных систем. В отсутствие этих двух систем расчет местоположения подводных аппаратов и носителей гидролокационных средств может вестись традиционными методами, а также методом моделирования конфигурации буксирной линии.
Представленные методы координатно-временной привязки результатов исследования дна акваторий и подводных объектов позволяют вести расчет координат любой точки на дне акватории по соответствующему гидролокационному изображению и навигационным данным в географической или относительной системе координат.
Библиографическая ссылка
Римский-Корсаков Н.А. ПРОСТРАНСТВЕННАЯ ПРИВЯЗКА РЕЗУЛЬТАТОВ ПОДВОДНЫХ ИССЛЕДОВАНИЙ // Международный журнал прикладных и фундаментальных исследований. 2017. № 11-1. С. 13-17;URL: https://applied-research.ru/ru/article/view?id=11921 (дата обращения: 17.05.2026).
DOI: https://doi.org/10.17513/mjpfi.11921