

Обобщенная блок-схема микроконтроллерной (МК) измерительно-управляющей системы (ИУС) представлена на рис. 1 и включает в себя: собственно МК ИУС [1, 2, 5, 6, 14]; совокупность различных измерительных преобразователей (ИП); совокупность контроллеров согласования по входу (КСВХ) МК ИУС; совокупность контроллеров согласования по выходу (КСВЫХ) МК ИУС; совокупность различных исполнительные устройст ва (ИУ).

Рис. 1. Обобщенная блок-схема МК ИУС
В качестве совокупности ИП используются [4, 7, 12, 16]: датчики температуры, датчики активного и реактивного сопротивлений, измерительные шунты, тензометрические датчики, датчики электрохимического потенциала (ДЭХП) [4], датчики поляризационного потенциала (ДПП) [4] и др., а в качестве ИУ [3, 8, 10, 11, 13, 15, 17] – различные типы электродвигателей, тахогенераторы (ТГ) [8, 17], электронных усилителей, тиристорные и оптоэлектронные твердотельные переключатели и регуляторы (ОТПР) [10], генераторы, модуляторы и др. В современных МК ИУС, с точки зрения критерия функциональная полнота / стоимость, целесообразно использовать МК фирм «Atmel» и «Microchip» [1, 2, 5], тогда интервалы входных и выходных напряжений МК ИУС строго определены: ![]() [0; +5] В;
[0; +5] В; ![]() В. Учитывая функциональные связи, из рис. 1 следует:
В. Учитывая функциональные связи, из рис. 1 следует: ![]() В;
В; ![]() В. Выходные напряжения ИП являются входными напряжениями КСВХ и могут быть любыми подынтервалами из интервала напряжений
В. Выходные напряжения ИП являются входными напряжениями КСВХ и могут быть любыми подынтервалами из интервала напряжений ![]() В, а выходные напряжения КСВЫХ являются входными напряжениями ИУ и тоже могут быть любыми подынтервалами из интервала напряжений
В, а выходные напряжения КСВЫХ являются входными напряжениями ИУ и тоже могут быть любыми подынтервалами из интервала напряжений ![]() В.
В.
Цель работы. Разработать алгоритм расчета КСВХ – для сопряжения ИП с МК ИУС и КСВЫХ – для сопряжения МК ИУС с ИУ, удовлетворяющих условиям:
 (1)
(1)
которые позволят выбрать элементную базу для построения схемы таких контроллеров согласования: КСВХ – первая система уравнений в (1); КСВЫХ – вторая система уравнений в (1).
Электрическая схема КСВХ и КСВЫХ. Существует большое множество вариантов подынтервалов входных сигналов КСВХ и выходных сигналов КСВЫХ, которое определяется большим разнообразием типом ИП и ИУ, соответственно. Принимая во внимание условия (1), синтезировать КСВХ и КСВЫХ целесообразно на основе операционных усилителей (ОУ) [3, 7, 9-11, 16]. Схема КСВХ и КСВЫХ одна и та же, а разница лишь в их настройке на соответствие условиям (1) и в месте установки в МК ИУС (рис. 1). Поэтому, где это допустимо, контроллеры сопряжения по входу и выходу КСВХ и КСВЫХ будем называть просто КС. Принципиальная электрическая схема КС на двух ОУ – КР140УД708 представлена на рис. 2.
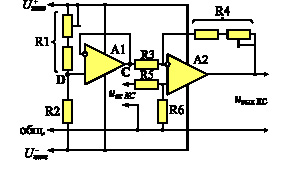
Рис. 2. Принципиальная электрическая схема КС на двух ОУ – КР140УД708
Первый ОУ А1 – неинвертирующий повторитель напряжения (инверсный вход А1 соединен с выходом) [7, 16] с коэффициентом передачи ![]() . Второй ОУ А2 – неинвертирующий каскад [9-11] с коэффициентом передачи
. Второй ОУ А2 – неинвертирующий каскад [9-11] с коэффициентом передачи ![]() . На прямой вход А1 подается напряжение UD (точка D на рис. 2) с делителя R1R2. Так как
. На прямой вход А1 подается напряжение UD (точка D на рис. 2) с делителя R1R2. Так как ![]() , то потенциалы точек D и С (рис. 2) равны между собой UD =UC, а напряжение UC – начальное смещением А2 по инверсному входу.
, то потенциалы точек D и С (рис. 2) равны между собой UD =UC, а напряжение UC – начальное смещением А2 по инверсному входу.
Графо-аналитическая интерпретация работы КС. Из выражения (1) следует, что КСВХ имеет большое множество подынтервалов входных сигналов, а КСВЫХ – большое множество подынтервалов выходных сигналов. Чтобы получить и обобщить результаты исследования рассмотрим графо-аналитическую интерпретация работы КС на примере двух подынтервалов входных сигналов КСВХ и двух подынтервалов выходных сигналов КСВЫХ. На двух следующих по тексту рисунках в одном масштабе показаны по две вертикальные оси (левая – ось входных сигналов КС – uвхКС, правая – ось выходных сигналов КС – uвыхКС, соответственно) и безразмерная горизонтальная линия, соединяющая нулевые значения входного и выходного сигнала КС uвхКС =uвыхКС = 0 В.
На рис. 3 представлена графо-аналитическая интерпретация процесса работы двух КСВХ при ![]() В.
В.
На рис. 4 изображена графо-аналитическая интерпретация процесса работы двух КСВЫХ при ![]() В.
В.
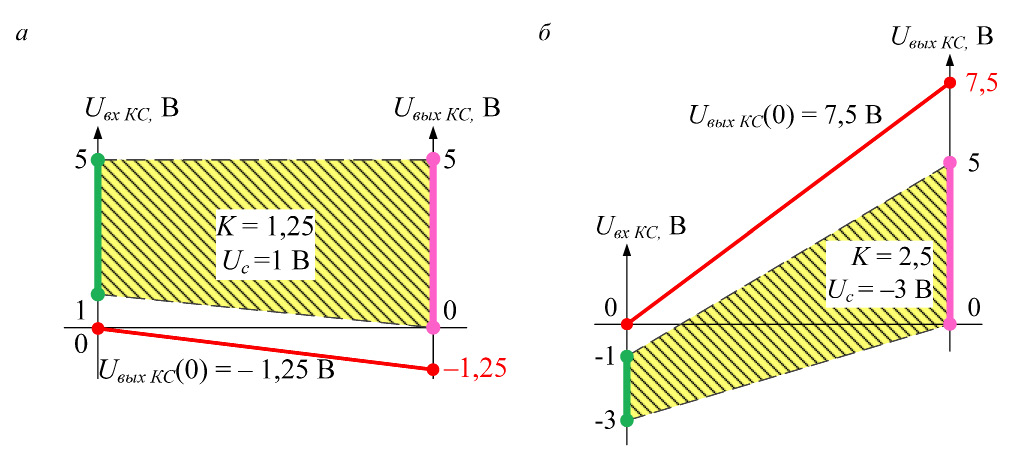
Рис. 3. Графо-аналитическая интерпретация работы двух КСВХ : а – ИП – ДПП [4] с ![]() В; б – ИП – ДЭХП [4] с
В; б – ИП – ДЭХП [4] с ![]() В
В
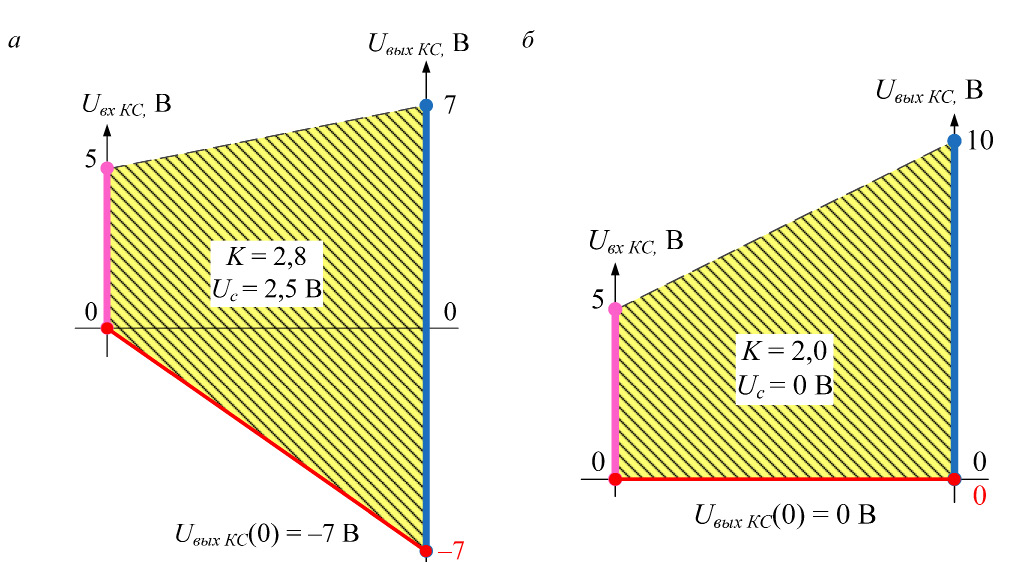
Рис. 4. Графо-аналитическая интерпретация работы двух КСВЫХ : а – ИУ – ТГ [8, 17] с ![]() В; б – ИУ – ОТПР [10] с
В; б – ИУ – ОТПР [10] с ![]() В
В
Так как коэффициент передачи каскада А1 ![]() (рис. 2), то коэффициент передачи КС (каскада А2 КС) определяется из выражения (рис. 3, рис. 4)
(рис. 2), то коэффициент передачи КС (каскада А2 КС) определяется из выражения (рис. 3, рис. 4)
![]() , (2)
, (2)
где ![]() и
и ![]() – максимальное и минимальное напряжение выходных сигналов КС (КСВХ или КСВЫХ);
– максимальное и минимальное напряжение выходных сигналов КС (КСВХ или КСВЫХ); ![]() – модуль интервала выходных напряжений КС;
– модуль интервала выходных напряжений КС; ![]() и
и ![]() – максимальное и минимальное напряжение входных сигналов КС (КСВХ или КСВЫХ);
– максимальное и минимальное напряжение входных сигналов КС (КСВХ или КСВЫХ); ![]() – модуль интервала входных напряжений КС.
– модуль интервала входных напряжений КС.
Из анализа процессов, представленных на рис. 3 и рис. 4, следует основное уравнение графо-аналитической интерпретации работы КС, определяющее численные значения напряжения на выходе КС ![]() при котором напряжение на входе КС
при котором напряжение на входе КС ![]() В
В
![]() . (3)
. (3)
Зная численные значения ![]() и K, определяемые из (3) и (2), соответственно, и учитывая графо-аналитические интерпретации работы КС (КСВХ и КСВЫХ) (рис. 3 и рис. 4) определяется начальное смещение ОУ А2 – UC (рис. 2) по инверсному входу
и K, определяемые из (3) и (2), соответственно, и учитывая графо-аналитические интерпретации работы КС (КСВХ и КСВЫХ) (рис. 3 и рис. 4) определяется начальное смещение ОУ А2 – UC (рис. 2) по инверсному входу
![]() . (4)
. (4)
Расчет элементов схемы КС. В каскаде А2 КС (рис. 2) сопротивления резисторов R3 и R5 одного номинала и составляют единицы-десятки килоом [9, 11], а сопротивления резисторов R4 и R6 рассчитываются из обеспечения требуемого коэффициента передачи K (2)
R6 ≈ R4 = K·R3. (5)
В каскаде А1 КС (рис. 2) номиналы сопротивления резисторов R1 и R2 обычно различные, но в сумме составляют единицы-десятки килоом [7, 16]. Задаваясь сопротивлением резистора R2, из известного (4) начального смещения ![]() по инверсному входу ОУ А1 определяется методом узловых потенциалов сопротивление резистора R1
по инверсному входу ОУ А1 определяется методом узловых потенциалов сопротивление резистора R1
![]() , (6)
, (6)
где ![]() В и
В и ![]() В – напряжения питания двух ОУ А1 и А2 КС (рис. 2).
В – напряжения питания двух ОУ А1 и А2 КС (рис. 2).
По известным численным значениям напряжений ![]() ,
, ![]() ,
, ![]() ,
, ![]() , коэффициенту передачи (2) – K и начальному смещению (4) – UC представляется возможным провести проверку результатов расчета КС из системы уравнений:
, коэффициенту передачи (2) – K и начальному смещению (4) – UC представляется возможным провести проверку результатов расчета КС из системы уравнений:
![]() (7)
(7)
Алгоритм расчета КС МК ИУС с ИП и ИУ
1. Для рассчитываемого КС, представленного на рис. 2, по заданным в (1) интервалам входных и выходных напряжений КС из (2) определяется коэффициент передачи КС – K.
2. Из основного уравнения (3) рассчитывается напряжение на выходе КС ![]() , при котором напряжение на входе КС
, при котором напряжение на входе КС ![]() = 0 В.
= 0 В.
3. По формуле (4) рассчитывается начальное смещение ОУ А2 – ![]() .
.
4. Выбрав величину сопротивлений резисторов R3 = R5 (единицы-десятки килоом) [9, 11], по выражению (5) рассчитывается точное значение сопротивления резистора цепи обратной связи ОУ А2 R4 и выбираем значение сопротивления резистора R6 ≈R4.
5. Выбрав величину сопротивления резистора R2 (единицы-десятки килоом) [7, 16], по формуле (6) рассчитывается сопротивление резистора R1 делителя напряжения R1 R2.
6. По результатам расчета КС проводится аналитическая проверка алгоритма работы рассчитанного КС по системе уравнений (7).
Проведем проверку работоспособности алгоритма расчета КСВХ – сопряжение ИУ с МК ИУС на конкретном примере, представленном на рис. 3,а.
Пример 1. По предложенному алгоритму рассчитать и провести проверку результатов расчета КСВХ с подынтервалом входных напряжений ![]() В и стандартным интервалом выходных напряжений
В и стандартным интервалом выходных напряжений ![]() В (рис. 3,а).
В (рис. 3,а).
1. По формуле (2) определяем K = (5–0)/(5–1) = 1,25.
2. Из уравнения (3) находим UвыхКС(0) =5–1,25·5 = –1,25 В.
3. По формуле (4) вычисляем UC = (–1,25/1,25) = +1 В.
4. Выбираем R3 = R5 = 20 кОм, тогда из выражения (5) определяем величину сопротивления резистора R4 = 1,25·20 = 25 кОм и принимаем R6 = 24 кОм.
5. Выбираем R2 = 10 кОм, тогда по формуле (6) находим величину сопротивления резистора R1 = [(15–1)/(1–(–15)]·10 = 8,75 кОм.
6. Из системы уравнений (7) получаем: UвыхКСmin = 1,25(1–1) = 0 В, и UвыхКСmax = = 1,25(5–1) = 5 В, что полностью соответствует исходным данным на расчет КСВХ (рис. 3,а). Решение задачи расчета КСВХ (рис. 3,б) тоже полностью подтверждает сходимость результатов проверки работоспособности предложенного алгоритма.
Пример 2. По предложенному алгоритму рассчитать и провести проверку результатов расчета КСВЫХ с подынтервалом выходных напряжений ![]() В и стандартным интервалом входных напряжений
В и стандартным интервалом входных напряжений ![]() В (рис. 4,а).
В (рис. 4,а).
1. По формуле (2) определяем K = [7–(–7)]/(5–0) = 2,8.
2. Из уравнения (3) находим UвыхКС(0) = 7–2,8·5 = –7 В.
3. По формуле (4) вычисляем UC = –(–7/2,8) = +2,5 В.
4. Выбираем R3 = R5 = 20 кОм, тогда из выражения (5) определяем величину сопротивления резистора R4 = 2,8·20 = 56 кОм и принимаем R6 = 56 кОм.
5. Выбираем R2 = 10 кОм, тогда по формуле (6) находим величину сопротивления резистора
R1 = [(15 –2,5)/(2,5 – (–15)] 10 » 7,143 кОм.
6. Из системы уравнений (7) получаем: UвыхКСmin = 2,8(0–2,5) = –7 В, и UвыхКСmaх = = 2,8(5–2.5) = +7 В, что полностью соответствует исходным данным на расчет КСВЫХ (рис. 4,а). Решение задачи расчета КСВЫХ (рис. 4,б) так же полностью подтверждает сходимость результатов проверки работоспособности предложенного алгоритма.
Выводы
1. На основе анализа структуры МК ИУС (рис. 1) сделан вывод о целесообразности синтезирования рассматриваемых КСВХ и КСВЫХ на основе ОУ (рис. 2).
2. На основе анализа графо-аналитической интерпретации работы двух КСВХ (рис. 3,а и 3,б) и двух КСВЫХ (рис. 4,а и 4,б) получено основное уравнение работы КС (3) – UвыхКС(0), которое обеспечило возможность расчета начального смещения ОУ КС (4) – UC для любых КСВХ и КСВЫХ по заданным исходным данным (1) и легло в основу разработанного алгоритма расчета КС МК ИУС с ИП и ИУ.
3. В лаборатории информационных технологий Тульского института экономики и информатики проведены проверки сходимости результатов алгоритма расчета и исследования принципиальных электрических схем, рассчитываемых вариантов КС, которые свидетельствуют о высокой эффективности и работоспособности предложенного алгоритма и схемы КС.
Библиографическая ссылка
Анкудинов К.А., Анкудинов А.И., Карпов Е.Б., Карпов И.Е. АЛГОРИТМ РАСЧЕТА КОНТРОЛЛЕРОВ СОГЛАСОВАНИЯ МИКРОКОНТРОЛЛЕРНЫХ ИЗМЕРИТЕЛЬНО-УПРАВЛЯЮЩИХ СИСТЕМ С ИЗМЕРИТЕЛЬНЫМИ ПРЕОБРАЗОВАТЕЛЯМИ И ИСПОЛНИТЕЛЬНЫМИ УСТРОЙСТВАМИ // Международный журнал прикладных и фундаментальных исследований. – 2014. – № 2-2. – С. 17-21;URL: https://applied-research.ru/ru/article/view?id=4998 (дата обращения: 20.04.2024).