

Рассматриваемая концепция летательного аппарата относится к авиации, в частности к пилотируемым летательным аппаратам вертикального взлета и посадки с возможностью зависания. Аппарат предназначен для доставки рабочих бригад и грузов в труднодоступные низкотемпературные зоны, расположенные на малоосвоенных территориях. Кроме того, аппарат может быть использован при проведении поисково-спасательных работ, для мониторинга территорий крупных промышленных предприятий и железнодорожных узлов, портов, трасс трубопроводов, линий электропередач. Он является дополнением в арсенале технических средств, предназначенных для работы в отдаленных и труднодоступных зонах хозяйствования.
Цель исследования
Создание воздушного транспортного средства, обладающего возможностями вертикального взлета и посадки на ограниченные площадки, в сложных метеоусловиях и в турбулентной атмосфере, с широким диапазоном изменения скорости полета вплоть до зависания в воздухе. Аппарата обладающего амфибийными свойствами, обеспечивающими возможности его эксплуатации, как на суше, так и на воде, льду и заснеженной поверхности.
Основные требования к исследуемому транспортному средству
- Подъемно-маршевый комплекс аппарата и его система управления, должны обеспечивать гарантированную отказобезопасность во всех конфигурациях полета.
- В случаях отказа подъемно-маршевого комплекса должна быть обеспечена возможность безаварийной посадки аппарата без повреждений подъемно-маршевого комплекса.
- Должны быть созданы комфортные условий для полноценного функционирования экипажа.
- Должны быть созданы комфортные условия для пассажиров, перевозимых в условиях низких температур, в полете, при промежуточных посадках и при наземном базировании в условиях непогоды.
Выбор аэродинамической компоновки аппарата
При выборе аэродинамической компоновки аппарата были учтены результаты исследований, проведенные в ОНТТЭ «Ювенал» города Таганрога, и результаты НИОКР, полученные учеными из С. Петербурга. В число результатов таких работ входят:
– результаты патентных исследований возможного облика и конструкции «Летающей платформы» с универсальным способом создания тяги для работы на малоосвоенных территориях [5, 6, 11];
– в качестве прототипа было рассмотрено техническое решение: Легкий многорежимный летательный аппарат, конструкция которого изложена в патенте РФ №2 348 568 от 29.06.2007 года.
– результаты исследований по выбору оптимальной формы ЛА [8];
– картины обтекания агрегатов аппарата скоростным потоком воздуха, демонстрирующие максимальный прирост подъемной силы [8];
– результаты численных (отработка программ Flow Simulation и CFX) и физических экспериментов (отработка на модельных установках имитирующих различные условия обтекания корпуса ЛА), подтверждающих целесообразность реализации проектов летательных аппаратов (ЛА) ВВП с комбинированным способом создания подъёмной силы.
Наиболее приемлемым вариантом для реализации поставленных задач, с учетом результатов проведенных исследований, оказалась схема аппарата «Летающая платформа» с подъемно-маршевыми агрегатами, в основу конструкции которой, положены технические решения, заявленные в патенте на изобретение № 2518143 от 04.09.2012 г. (RU) «Летательный аппарат вертикального взлета и посадки», авторов: Воронкова Ю.С., Воронкова О.Ю., Ушакова А.П.
Как известно, по сообщениям фирм, имеющих опыт проектирования и строительства «летающих платформ» – стоимость изготовления, простота управления и эксплуатации «летающих платформ» вполне могут конкурировать с обыкновенными автомобилями, а по тактическим возможностям могут значительно превосходить их.
Основным движителем ранее построенных летательных аппаратов этого типа являлись аэродинамическая система «воздушный винт в кольце» и «воздушный винт в туннеле». Сегодня, на основании результатов наших исследований, можно говорить об использовании подъемно-маршевого комплекса, составленного из набора подъемных агрегатов, описанных в патенте на изобретение № 2518143 от 04.09.2012 г. (RU).
Описание аппарата
Аппарат (рис. 1, 2, 4) представляет собой платформу 1, внутри которой, по её длине, двумя рядами, по 4 шт. размещены восемь подъемных агрегатов 2, конструкция которых выполнена по аэродинамической схеме, защищенной патентом на изобретение № 2518143 от 04.09.2012 г. (RU) «Летательный аппарат вертикального взлета и посадки». Питание воздухом каждого из подъемных агрегатов 2, производится через воздухозаборники 3.
Хвостовая часть платформы 4 оснащена двумя плоскостями вертикального оперения 5. Между плоскостями 5 закреплены с возможностью поворота, два подъемно-маршевых вентилятора 6. Для беспрепятственного протекания потока воздуха, создаваемого вентиляторами 6 при вертикальном взлете, посадке и на переходных режимах, в хвостовой части платформы 1 аппарата, имеются незамкнутые полукруглые вырезы 7. Подъемно-маршевые вентиляторы 6 выполнены по схеме «воздушный винт в кольце». Имеют возможность плавного поворота из горизонтального положения плоскостей вентиляторов в вертикальное и наоборот, что позволяет соответствующим образом изменять направление вектора тяги. На верхней плоскости платформы, по её длине, между вентиляторами, размещена обтекаемая кабина экипажа и пассажиров 8. Сверху кабина экипажа и пассажиров 8 закрыта открывающимся прозрачным фонарем 9 из ударопрочного, морозостойкого пластика. Продолжением фонаря 9 в хвостовой части 4 является обтекатель 10, закрывающий силовую установку 11 с генераторами 12 и систему управления поворотом подъемно-маршевых вентиляторов 13. Кабина 8 оснащена системой кондиционирования 14, автоматически поддерживающей заданную температуру внутри её, как в полете, так и, длительно, на земле. Наземное кондиционирование обеспечивается специальной экономичной вспомогательной силовой установкой 15.
Описание подъемного агрегата
Подъемный агрегат 2 аппарата (рис. 3), имеет дисковидный полый корпус 16, внутри которого установлено с возможностью вращения рабочее колесо 17 центробежного вентилятора. Привод рабочего колеса 17 центробежного вентилятора, осуществляется высокоэффективным электродвигателем, 18, выполненным на основе редкоземельных магнитных систем.
Корпус подъемно-маршевого агрегата 16 образован двумя поверхностями 19, 20 специальной кривизны, установленными на определенном расстоянии, одна относительно другой. Это расстояние выполняет функции кольцевого пространственного диффузора 21, в котором, также, установлен лопаточный диффузор 22. Пространственный диффузор 21 имеет плавный поворот на ≈ 150 ° и оканчивается кольцевым соплом 23, сечением d, обеспечивающим центростремительное направление расширения реактивной струи 24. Верхняя поверхность корпуса оснащена всасывающим отверстием 26 для обеспечения подачи воздуха к центробежному вентилятору из воздухозаборников 3.
Нижняя, более выпуклая поверхность 20, выполнена по образующей, определяемой расчетной кривой, представляет собой конусовидный стекатель, который кооксиально установлен в сопло 23. При скоростном центростремительном истечении воздуха из сопла 23, поток 24 устремляется вдоль поверхности 20 конусовидного стекателя, обеспечивая падение давления воздуха на его периферии, затем расширяется, формируя симметричный профиль истечения воздушной струи, которая создает реактивную силу с повышенным давлением. В результате такого взаимодействия воздуха, сопла и конусовидного стекателя, кроме реактивной силы, появляется дополнительная подъемная сила Y. Нижняя поверхность конусовидного стекателя 20, оснащена коком – амортизатором 25, предохраняющим аппарат от жесткого соприкосновения с неровной поверхностью при его посадке на неподготовленные площадки.
Технические решения, реализованные в данной конструкции подъемного агрегата 2, позволяют использовать его компоновку для создания модулей, формирующих групповые подъемные устройства «летающих платформ». Электроэнергия для работы нескольких таких подъемных 2 и подъемно-маршевых 6 агрегатов вырабатывается генераторами 12, приводимыми во вращение специальными многотопливными высокоэкономичными двигателями 11, аналогичными, например, ТВД Чешского производства M-601F32 Walter, которые устанавливаются внутри платформы 1.
Данная компоновка аппарата, кроме указанных выше особенностей, обеспечивает максимально комфортные условия для работы экипажа, изолируя его от широкого спектра шумов и колебаний, создаваемых силовыми установками с вентиляторами, а также, повышает безопасность взлета и посадки аппарата. Аппарат управляется одним членом экипажа с высокой степенью автоматизации процессов взлета, полета и выполнения посадки.
Техническое решение поясняется чертежами, где:
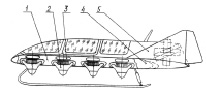
Рис. 1. Вид аппарата сбоку в горизонтальной конфигурации полета с разрезом по подъемным агрегатам
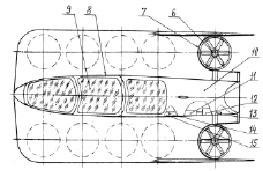
Рис. 2. Вид аппарата сверху в конфигурации вертикального взлета и посадки
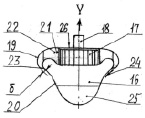
Рис. 3. Схема подъемного агрегата
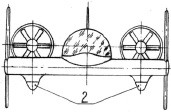
Рис. 4. Вид аппарата спереди в конфигурации горизонтального полета
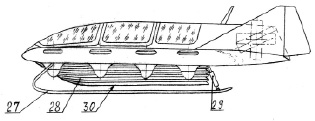
Рис. 5. Вид аппарата сбоку в конфигурации вертикального взлета и посадки с выпущенным взлетно-посадочным устройством
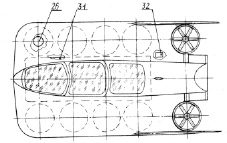
Рис. 6. Вид аппарата сверху в конфигурации вертикального взлета и посадки с выпущенными взлетно-посадочными устройствами
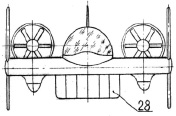
Рис. 7. Вид аппарата спереди с выпущенными взлетно-посадочными устройствами
Взлетно-посадочные устройства
Аппарат снабжен взлетно-посадочными устройствами в виде комбинации лыжного шасси 27 и убираемого пневмоамортизатора 28.
Наличие комбинации лыжного шасси 27 с пневмоамортизатором 28, позволяет аппарату выполнять безопасную посадку на неподготовленные площадки, в том числе на снег, лед, грунт, песок, водную и заболоченную поверхности без поломок. Аппарат способен перемещаться на лыжном шасси 27 по твердому снегу и льду. Пневмоамортизатор 28 совместно с платформой 1, придают аппарату плавучесть.
В момент посадки аппарата на снег, грунт, лед, песок его касание происходит посредством лыжного шасси 27, которое снабжено пневмогидроамортизатором 29, поглощающим энергию возможного удара с превращением ее в тепло.
При посадке на водную поверхность, аппарат с некоторой допустимой скоростью горизонтального перемещения, сначала касается лыжным шасси 27, её поверхности, затем пневмоамортизатором 28, в котором при дальнейшем его обжатии, происходит демпфирование составляющей вертикальной скорости аппарата. Большая часть кинетической энергии касания аппарата передается в виде распределенной нагрузки на элементы конструкции платформы 1. Вся конструкция пневмоамортизатора 28 выполнена из эластичных композитных материалов типа кевлара со специальной пропиткой, а нижняя поверхность 30 покрыта антифрикционным составом (пленкой) с характеристиками подобными фторопласту.
После взлета с воды, происходит уборки пневмоамортизатора 28 в виде пакета в нишу 31 с её последующим закрытием нижним основанием 30 и постановкой на замки. Уборка пневмоамортизатора 28 осуществляется подсистемой управления пневмоамортизатором 32, входящей в БСАУ, исполнительными элементами которой, являются специальные гофроцилиндры. Гофроцилиндры работают в режиме вакуумирования при уборке пневмоамортизатора 28 или в режиме нагнетания при выпуске его. Команды на выпуск пневмоамортизатора 28 формируются, также, подсистемой управления пневмоамортизатором БСАУ.
Стратегия управления аппаратом
Стратегия управления данным аппаратом предложена в соответствии с результатами, описанными в литературе [10, 11] и заключается в следующем:
1. Разбиение на отдельные изолированные контуры управления для каждого канала не производится, управляющие воздействия вычисляются совместно на основе универсальных синергетических алгоритмов пространственного движения с учетом информации обо всех переменных состояния системы. Таким образом, при вычислении вектора взаимосвязанных управляющих воздействий учитываются перекрестные связи между каналами управления, взаимное влияние которых на некоторых этапах полета может иметь большое значение.
2. Используемые универсальные синергетические алгоритмы пространственного движения получены в аналитическом виде без линеаризации математической модели, что позволяет наиболее адекватно описать процессы пространственного движения, а также не «привязывать» алгоритмы управления автопилота к конкретному объекту и его параметрам. Аэродинамические параметры и компоновочная схема данного ЛА задаются в виде специальных алгебраических уравнений связи, с помощью которых вычисляются непосредственно уставки для исполнительных органов и систем аппарата.
Взлет аппарата, переход в горизонтальный полет, зависание, посадка
При нахождении аппарата на поверхности земли, перед его взлетом, экипаж запускает силовую установку 11 с генераторами 12, которые обеспечивают электроэнергией подъемные агрегаты 2 и подъемно-маршевые вентиляторы 6, а также бортовое оборудование. Взлет аппарата, управляемого командами Бортовой Системой Автоматического Управления (БСАУ), выполняется при работе восьми подъемных агрегатов 2 и переведенных в горизонтальное положение двух подъемно-маршевых вентиляторов в кольцах 6. Все десять вращаемых электроприводами устройств, отбрасывают воздушный поток вниз и с ростом мощности, обеспечивают отрыв аппарата от поверхности земли с последующим набором безопасной высоты. Аппарат зависает. После текущего контроля отказобезопасности, БСАУ дает команду на поворот подъемно-маршевых вентиляторов 6 для создания пропульсивной силы при полной компенсации массы аппарата увеличивающейся тягой подъемных агрегатов 2. Вектор тяги подъемно-маршевых вентиляторов 6 при этом, плавно переводится из вертикального направления в горизонтальное. Под действием тяги подъемно-маршевых вентиляторов 6, аппарат разгоняется в горизонтальном направлении.
При посадке, аппарат замедляет скорость. Повышая мощность подъемных вентиляторов 2, и одновременно уменьшая мощность подъемно-маршевых вентиляторов 6, переводит вектор их тяги из горизонтальной в вертикальную конфигурацию, зависает на некоторой высоте над местом приземления. При этом, он оказывается в состоянии устойчивого равновесия, обусловленного равенством сил и моментов, создаваемых подъемными агрегатами 2 и подъемно – маршевыми вентиляторами 6. При дальнейшем уменьшении мощности подъемных агрегатов 2 и подъемно-маршевых вентиляторов 6, аппарат производит приземление.
Выводы
Совместная работа подъемных агрегатов и подъемно – маршевых вентиляторов, способна создавать вертикальную тягу, уравновешивающую и превышающую массу аппарата.
В наземных условиях, работа подъемно – маршевых вентиляторов, переведенных в горизонтальную конфигурацию, при малых затратах мощности, с отключенными подъемными агрегатами, может создавать управляемую пропульсивную силу. Аппарат с такой аэродинамической компоновкой, малыми габаритами и защищенными движителями, превращается в аэросани, способные двигаться по льду и снегу для доставки грузов в отдаленные места.
Конструкция аппарата, его динамические свойства и законы управления, аналогичны параметрам, отраженным в проекте летательного аппарата, описанного в патенте РФ №2348568 от 29.06.2007, МПК8 В64С 15/00, В64С 15/12. Воронков Ю.С., Воронков О.Ю. «Лёгкий многорежимный летательный аппарат».
Библиографическая ссылка
Воронков Ю.С., Воронков О.Ю., Ушаков А.П. «ЛЕТАЮЩАЯ ПЛАТФОРМА» ДЛЯ РАБОТЫ НА МАЛООСВОЕННЫХ ТЕРРИТОРИЯХ // Международный журнал прикладных и фундаментальных исследований. 2016. № 3-3. С. 376-381;URL: https://applied-research.ru/ru/article/view?id=8739 (дата обращения: 01.07.2026).