
Scientific journal
International Journal of Applied and fundamental research
ISSN 1996-3955
ИФ РИНЦ = 0,556
LOCALIZATION OF OPEN WATER AND DILUTED IN THE IMAGE SURFACE OF THE ARCTIC

В настоящее время для визуального наблюдения труднодоступных территорий все чаще используются беспилотные летательные аппараты (БПЛА). Разработаны модели БПЛА, которые с учетом тяжелых климатических условий могут использоваться в Арктике практически круглогодично. При этом даже БПЛА, относящиеся к классу микро, способны работать в условиях скорости ветра до 25 м/с, что делает их, ограничено применимыми для использования в Арктической зоне.
Очевидно, что уже в ближайшем будущем перед индустрией БПЛА будут поставлены задачи обеспечения комплексного автоматического мониторинга Арктического пространства. Это в свою очередь требует разработки новых технологических решений в области компьютерного зрения [1], способных работать в режиме реального времени. Аналогичную ситуацию можно сейчас наблюдать в автомобильной промышленности, где системы беспилотного управления на базе технического зрения являются, наверное, главным трендом развития.
Цель исследований. В настоящей работе рассмотрен подход быстрого поиска на изображениях участков поверхности с открытой водой и разводьями с помощью методов бинаризации. Объектом интереса выступают арктические пустыни, морское пространство Арктики и прибрежные акватории. В целях настоящего исследования не рассматриваются поверхности, круглогодично имеющие растительность и лишенные снежного покрова, которые присутствует в природных зонах материковой Арктики как в гористых, так и на равнинных участках.
Материалы и методы исследования
Бинаризация как метод обработки изображений получил широкое распространение в системах компьютерного зрения для распознавания, классификации и отслеживания наблюдаемых объектов. Бинаризованным является изображение, в котором каждый пиксель может иметь только два значения, соответствующим двум цветам (обычно это черный и белый). Главным параметром бинаризации является порог – значение, которое является критерием проверки интенсивности точки изображения.
 (1)
(1)
где T – порог бинаризации, который может иметь фиксированное значение или вычисляться эмпирическим путем [2,3]. Различают методы глобальной и локальной бинаризации. Глобальная бинаризация подразумевает вычисление постоянного значения пороговой яркости для всего изображения, а в методах локальной бинаризации значение пороговой яркости рассчитывается на основе некоторых локальных признаков в окрестности каждого пикселя.
Одним из наиболее распространенных методов глобальной бинаризации является метод Отсу [4], который может применяться для обработки различных изображения без ввода каких-либо начальных условий. Вычисление порога в данном методе реализуется через минимизацию внутригрупповой дисперсии двух групп пикселей, разделяемых оператором пороговой бинаризации. Метод Отсу получил широкое развитие в работах других исследователей. В частности существуют различные модификации метода, в которых предлагаются его усовершенствования в части ускорения вычислений [5], в том числе с использованием распараллеливания вычислений на видеокартах.
Из методов локальной бинаризации [6], используемых в задачах визуальной навигации, можно выделить метод Ниблека. В его основе лежит вычисление локального среднего значение и стандартного отклонения интенсивности элементов изображения в пределах анализируемого окна [7]:
 , (2)
, (2)
где T(x,y) является локальным порогом бинаризации, m(x,y) – среднее значение яркости участка изображения, s(x,y) – стандартное отклонение значения яркости изображения в некоторой окрестности рассматриваемой точки, k – коэффициент Ниблэка.
В целом, можно сказать, что основной задачей исследователей является выбор «нужного» метода бинаризации для исследуемого класса изображений. Применительно к настоящему исследованию, после «правильной» бинаризации изображений Арктической поверхности участки открытой воды и разводий должны представлять собой черные пятна.
Для обработки реальных изображений поверхности Арктики были исследованы рассмотренные выше методы Отсу, Ниблека, а также общеизвестные методы «Adaptive Mean Thresholding» и «Adaptive Gaussian Thresholding», реализованные в библиотеке компьютерного зрения OpenCV.
Примеры работы различных алгоритмов бинаризации на реальных цветных изображениях поверхности Арктики, на которых присутствует открытая вода и разводья, приведены на рис. 1 и 2.
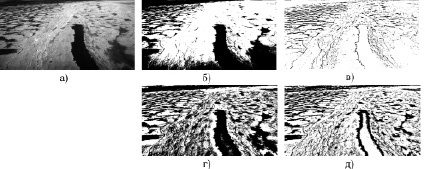
Рис. 1. а – исходное изображение; б-д – результаты бинаризации методами Отсу, Ниблека, «Adaptive Mean Thresholding», «Adaptive Gaussian Thresholding»
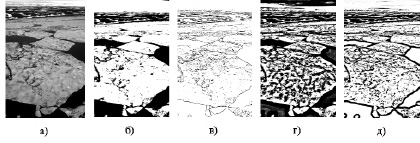
Рис. 2. а – исходное изображение; б-д – результаты бинаризации методами Отсу, Ниблека, «Adaptive Mean Thresholding», «Adaptive Gaussian Thresholding»
Результаты исследования и их обсуждение
В ходе исследования для локализации участков открытой воды и разводий рассмотрены различные методы адаптивной бинаризации. Показано, что в реальных условиях в силу особенностей обрабатываемых изображений и поставленной задачи целесообразно использовать алгоритмы глобальной бинаризации. Методы локальной бинаризации позволяют выделять границы интересующих участков на поверхности, но для выделения водных участков требуют проведения дополнительного исследования. В тоже время они могут использоваться в качестве дополнительных инструментов для анализа отдельных участков изображений.
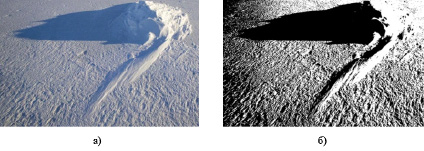
Рис. 3. а – исходное изображение; б – результаты бинаризации методом Отсу
Стоит отметить, что использование предлагаемого подхода для обработки изображений, не содержащих участки с открытой водой, может привести к получению ошибочных результатов и выделению элементов поверхности с наименее высоким значением яркости – области тени (рис. 3).
Заключение
В работе предложен подход к решению задачи локализации открытой воды и разводий на изображениях арктической поверхности, основанный на адаптивной бинаризации изображений. Выделение на изображениях области со снежным или ледовым покровом, необходимо для развития различных междисциплинарных исследований Арктической зоны методами, основанными на стереозрении и изучении изменения отражательной способности поверхности.
Несмотря на простоту и в целом «грубую» локализацию участков воды на поверхности, результаты бинаризация являются достаточными для выделения участков со снежным и ледовым покровом применительно к задаче восстановления рельефа. Преимуществом предложенного подхода является высокая скорость работы, что позволяет использовать его на этапе предварительной обработки в режиме реального времени при исследовании Арктики с применением БПЛА.
Работа выполнена при финансовой поддержке грантов РФФИ 15–29–06091 офи-м и 15–29–06080 офи-м.
Библиографическая ссылка
Путинцев Д.Н., Кац В.А., Арлазаров Н.В. ЛОКАЛИЗАЦИЯ ОТКРЫТОЙ ВОДЫ И РАЗВОДИЙ НА ИЗОБРАЖЕНИЯХ ПОВЕРХНОСТИ АРКТИКИ // Международный журнал прикладных и фундаментальных исследований. 2017. № 1-2. С. 341-343;URL: https://applied-research.ru/en/article/view?id=11196 (дата обращения: 03.07.2026).