
Scientific journal
International Journal of Applied and fundamental research
ISSN 1996-3955
ИФ РИНЦ = 0,556
DETERMINATION OF THE POSITION OF UNDERWATER NATURAL OBJECTS BY SIDE SCAN SONAR

При расчете координат подводного объекта, зарегистрированного с помощью гидролокатора бокового обзора (ГБО), используются известные координаты положения носителя антенн в процессе съемки и его ориентация в пространстве в горизонтальной плоскости относительно оси координат, направленной на север (0 °).
Точность гидролокационной съемки складывается из точности измерения расстояний до объектов локации (поверхность дна, объекты на дне, объекты и границы в толще грунта), точности измерения углов прихода эхо-сигналов (для батиметрических ГБО), точности навигационной привязки местоположения носителя антенн и точности измерения углов его ориентации.
Детальность гидролокационной съемки определяется минимальными размерами природного объекта или его элементов, при котором гидролокационное плановое изображение или профиль природного объекта позволяет судить о морфологии объекта, его пространственной ориентации и размерах. Детальность съемки однозначно связана с разрешающей способностью гидролокационного прибора по дальности (по направлению излучения) и углу (по нормали к направлению излучения), рабочим диапазоном (частотой следования зондирующих импульсов), скоростью движения (буксировки) носителя антенн ГБО, акустического профилографа (АП) или эхолота (ЭХ), а также частотой заложения галсов съемки.
Разрешающая способность гидролокационного прибора по дальности – это минимальное расстояние между двумя объектами (элементами объекта) в направлении излучения зондирующих импульсов, при котором эти объекты регистрируются гидролокационным прибором раздельно. Разрешающая способность по дальности определяется длительностью зондирующих импульсов (чем короче импульс, тем выше разрешающая способность) и частотой его заполнения.
Разрешающая способность в плоскости, перпендикулярной направлению излучения – это минимальное расстояние между двумя объектами, лежащими в этой плоскости, при котором они регистрируются раздельно. Она зависит от размера антенны (в ближней зоне излучения), угла раскрыва характеристики направленности и дальности до объекта локации (в дальней зоне излучения).
Алгоритм определения координат точечного объекта с помощью ГБО объясняется схемой, приведенной на рис. 1, где точкой «О» обозначен зарегистрированный объект, находящийся на траверсе движения носителя антенн ГБО.

Рис. 1. Схема для расчета координат объекта, зарегистрированного с помощью ГБО
Линией, проведенной под углом a1 к оси Y, обозначена ориентация антенны ГБО. В соответствии со схемой выражения для координат объекта(x0; y0) в момент регистрации его с помощью ГБО будут иметь вид
 , (1)
, (1)
 , (2)
, (2)
где (x; y) – координаты центра антенны ГБО, r – дальность до объекта, регистрируемого ГБО в горизонтальной плоскости, a1 – угол ориентации антенны ГБО в горизонтальной плоскости в выбранной системе координат (в данном примере – относительно направления оси Y). Основным параметром, характеризующим процесс определения координат объекта с помощью ГБО, является его точность. Погрешность определения координат объекта (x0; y0) связана с погрешностью определения (x; y), r и a1.
Горизонтальная дальность r определяется из наклонной дальности L до объекта, регистрируемой на изображении, получаемом с помощью ГБО. На рис. 2 показана геометрия связи r и L, где b – угол между текущим направлением лоцирования объекта в вертикальной плоскости на расстоянии L от антенны ГБО и горизонтальной плоскостью, а h – глубина расположения объекта локации относительно горизонта положения антенны ГБО.
Если для исследования поверхности дна используется так называемый батиметрический ГБО, позволяющий определять угол прихода эхосигнала b на основе измерений его фазы, то горизонтальная дальность до объекта рассчитывается из соотношения
 . (3)
. (3)
Ошибка фазового способа в определении r по L составляет 1–2 % от L [1]. Батиметрические (фазовые, интерферометрические) ГБО являются сложными дорогостоящими устройствами, которые используются при работах, когда основной задачей является съемка рельефа дна. Для поиска, локализации и картирования границ подводных объектов такие ГБО не используются. Поэтому горизонтальная дальность до объекта рассчитывается исходя из предположения о плоском дне (предполагается, что поверхность дна горизонтальна – Н = h)
 . (4)
. (4)
При этом ошибка в расчете r определяется точностью измерения Н и L по гидролокационному изображению. При использовании современных цифровых методов измерений эта ошибка не превышает 10 см, что на порядок меньше остальных погрешностей.
Оценим погрешность в измерении r для разных уклонов дна в плоскости перпендикулярной направлению перемещения антенны ГБО. На рис. 2 поверхность дна (А-А) наклонена к горизонту под углом α. Выражение для r примет вид
 . (5)
. (5)
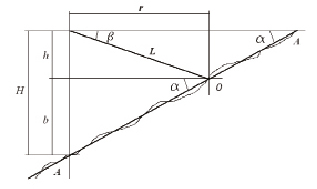
Рис. 2. Схема для расчета погрешностей определения местоположения объектов локации, связанных с уклоном дна α
Оценим a. Среднее значение уклона дна материковой отмели составляет 1 °, континентального склона – 3–7 ° и редко достигает 20–30 ° [4]. При поперечных направлению перемещениях антенны ГБО углах наклона поверхности дна a, значения которых превышают 15–20 °, изображения дна, получаемые с помощью ГБО, качественно ухудшаются. В этом случае, как правило, съемку дна ведут по направлениям с меньшими поперечными углами. Таким образом, угол a не превышает 20 °. Величина tg2a при этом меньше 0,1, поэтому в выражении (5) ею можно пренебречь. Тогда, если отбросить значения r, отсчитываемые влево, и учитывая, что смысл имеют только те значения r, при которых L > H, получим
 . (6)
. (6)
Оценим величину D для крайних значений параметров:
 . (7)
. (7)
Пусть a = 20 °. Наилучшее соотношение для наклонной дальности и расстояния антенн ГБО до дна составляет L = (5÷10)H. Часто на мелководье приходится работать при L = (15÷30)H. Соотношений L = (2÷3)H обычно не допускают и исключают это путем заглубления носителя ГБО. На рис. 3 приведены графики значения Δ(L/H) для разных значений α. Как видно из графиков, в основной рабочей области относительная погрешность определения дальности до объекта с помощью гидролокатора бокового обзора не превышает 5 %.
Вторая составляющая погрешности в определении r связана с тем, что фиксация цели в горизонтальной плоскости происходит в пределах угла раскрыва θ основного лепестка характеристики направленности антенны ГБО. Для подавляющего числа моделей ГБО этот угол составляет 1 °, а максимальная погрешность  , что соответствует 0,004 % от расстояния до объекта, то есть эта составляющая ничтожна.
, что соответствует 0,004 % от расстояния до объекта, то есть эта составляющая ничтожна.
Не менее важно оценить и точность определения координат объекта, обусловленную погрешностью определения угла ориентации антенны ГБО в горизонтальной плоскости a1. Если принять, что погрешность определения угла a1 составляет Da1, тогда в соответствии с выражениями (1) и (2) координаты положения объекта, регистрируемого с помощью ГБО, с учетом погрешности определения угла ориентации антенны, примут вид
 , (8)
, (8)
 . (9)
. (9)
Расстояние между точками (x0D; y0D) и (x0; y0) будет равно
 .
.
После преобразований получим
 . (10)
. (10)
На рис. 4 приведены графики значений Dxy в зависимости от Da1 для ряда значений r.
Приведенные на рис. 4 зависимости Dxy(Da1, r) показывают, что ошибка в определении угла ориентации антенны ГБО существенно влияет на определение координат объектов.
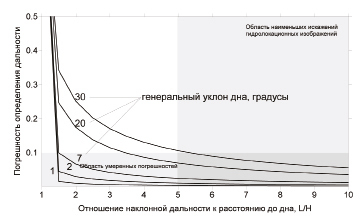
Рис. 3. Графики зависимости относительной погрешности определения дальности до объекта в зависимости от отношения наклонной дальности к расстоянию до дна при различных значениях генерального уклона дна в районе исследований
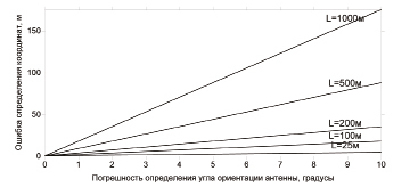
Рис. 4. Величина отклонения координат объекта в зависимости от ошибки определения угла ориентации антенны ГБО для ряда значений расстояния до объекта
Угол ориентации антенны ГБО может определяться непосредственно с помощью датчиков курса – магнитных (погрешность до 0,5 °) и гироскопических (погрешность до 0,05 °), а также вычисляться по координатам точек обсерваций (погрешность < 5 °). В последнем случае используются космические навигационные системы, что позволяет автоматизировать процесс сбора навигационной информации. В первом случае точность определения угла ориентации антенны ГБО (a1) зависит от параметров используемого датчика курса. Во втором случае – от точности навигационной системы и условий проведения работ, а именно: насколько точно ориентация антенны (курсовой угол) совпадает в данный момент времени с направлением ее перемещения (путевой угол).
Качество информации, получаемой с помощью ГБО, существенно зависит от стабильности ориентации его антенны по дифференту. Поэтому при работах в открытом море, где всегда присутствует зыбь и ветровое волнение, носители антенн ГБО, как правило, буксируют и обеспечивают стабильность их ориентации с помощью гидродинамических и гравитационных стабилизаторов. В условиях закрытых водоемов, таких как морские гавани, озера, водохранилища, где поверхность воды относительно спокойна, а течения слабые, применяется жесткое крепление антенн ГБО к корпусу судна – стационарное или выносное (набортное). Жесткое крепление возможно и при использовании в морских условиях при работах на крупнотоннажных судах, которые нечувствительны к волнению поверхности моря в конкретной ситуации. Специфической ситуацией является работа на реках, где спокойная поверхность воды сочетается с наличием сильных течений на отдельных участках русла и водоворотов [2]. В случаях, когда ориентация носителя антенн совпадает с направлением движения, угол a1 равен углу путевого курса и может быть рассчитан по серии определений координат носителя.
Условие совпадения ориентации антенн и направления движения характерно для работ с буксируемыми носителями при небольших (до 100 м) длинах буксирной линии на прямолинейных галсах. Это возможно и в случае жесткого крепления носителя к корпусу плавсредства при работах на мелководье и в отсутствии сильных внешних воздействий (ветер, течения), когда плавсредство хорошо удерживается на курсе. В случаях, когда не требуется высокая точность определения координат объектов, а достаточно установление факта их наличия на дне в данном районе, либо ведется картирование изменчивости морфологии дна вдоль определенного маршрута, например судового хода реки, ориентацию носителя антенн принимают равной направлению движения. В случае глубоководной буксировки ориентация подводного буксируемого аппарата-носителя антенны не совпадает с его направлением движения [3].
Когда ориентация антенны вычисляется по координатам точек обсерваций, для проведения обсерваций используются космические навигационные системы (GPS и ГЛОНАСС), позволяющие автоматизировать процесс сбора навигационной информации.
Точность определения места с помощью GPS составляет 12 м в прямом режиме, 2–5 м – в дифференциальном режиме при использовании стационарных станций поправок и < 1 м при использовании локальных станций, привязанных геодезическими методами, а также космических сервисов получения поправочных данных [6]. При прямолинейном движении соседние точки GPS обсерваций могут быть на некотором расстоянии от истинного места. Поэтому рассчитывать курс по координатам соседних точек обсерваций было бы не совсем верно. Очевидно, что значение курса должно определяться на некотором интервале времени Т, соответствующем пути L, который на порядок больше ошибки в определении координат места судна-носителя антенн ГБО. Переходя к скорости V движения носителя, можно записать
 , (11)
, (11)
где DGPS – ошибка навигационной системы.
Теоретически ошибка в определении курса для всех типичных случаев (L = 10DGPS) не должна превышать 5,7 ° при прямолинейном движении. На практике разброс данных GPS может быть значительно меньше, однако и истинный путь движения носителя ГБО не является прямолинейным, особенно при работах в стесненных акваториях и на реках.
Современные GPS-приемники позволяют получать координаты места с частотой до 10 определений в секунду, однако большинство приемников выдают координаты места с частотой 1 и реже 2 раза в секунду. Частота же следования посылок ГБО, особенно при подробной съемке, может составлять 5–20 Гц. Для получения координат антенны ГБО между точками обсерваций используется метод интерполяции.
При установке антенны ГБО жестко на плавсредстве координаты ее центра (х; у) связаны с координатами плавсредства. Если координирование плавсредства осуществляется с помощью GPS, то точкой определения координат судна является приемная антенна GPS. Антенну GPS стараются установить так, чтобы она располагалась на одной вертикальной оси с центром антенны ГБО. Тогда координаты места, получаемые с помощью GPS, совпадают с координатами центра антенны ГБО. Если совмещение антенн в вертикальной плоскости невозможно, либо антенна буксируется за судном на небольшом расстоянии (100–200 м), то осуществляют пересчет – редукцию координат. В случае буксировки антенн ГБО на значительных глубинах и удалениях от судна определение координат буксируемого носителя ведется с помощью гидроакустических навигационных систем (ГАНС) [5], либо рассчитывается исходя из конфигурации буксирной линии.
Заключение
Рассмотренные теоретические основы координатно-временной привязки результатов исследования дна акваторий и подводных природных объектов с помощью гидролокатора бокового обзора позволяют:
а) вести расчет координат любой точки на дне акватории по соответствующему гидролокационному изображению и навигационным данным в географической или относительной системе координат;
б) позволяют методически повысить качество и эффективность координатно-временной привязки результатов исследований.
Библиографическая ссылка
Римский-Корсаков Н.А. ОПРЕДЕЛЕНИЕ КООРДИНАТ ПОДВОДНЫХ ПРИРОДНЫХ ОБЪЕКТОВ МЕТОДОМ ГИДРОЛОКАЦИИ БОКОВОГО ОБЗОРА // Международный журнал прикладных и фундаментальных исследований. 2017. № 12-1. С. 148-153;URL: https://applied-research.ru/en/article/view?id=11981 (дата обращения: 02.08.2026).
DOI: https://doi.org/10.17513/mjpfi.11981