
Scientific journal
International Journal of Applied and fundamental research
ISSN 1996-3955
ИФ РИНЦ = 0,556
THE METHOD OF APPLICATION OF THE MOISTURE SENSOR EC-5 DECAGON

Получившие широкое распространение в научной и производственной практике датчики влажности сыпучих и теплоизоляционных материалов ЕС-5 Decagon исходно предназначены для применения их в стационарных условиях. В сельскохозяйственной практике, например, датчики используются для мониторинга динамики почвенной влаги. С этой целью они полностью, вместе с соединительными проводами, на длительный срок устанавливаются в почвенном профиле на определенных глубинах. Наши исследования показали, что технические характеристики и конструктивные особенности датчиков позволяют использовать их для решения более широкого круга задач. В частности, возможен вариант и мобильного применения датчика ЕС-5 – для изучения пространственно-временной вариабельности почвенной влажности. С практической точки зрения это позволяет на два порядка (в 100 раз), по сравнению с термостатно-весовым методом, сократить затраченное время. В статье рассматриваются методические вопросы, связанные с решением этой проблемы.
Датчик ЕС-5 измеряет относительную диэлектрическую проницаемость почвы ε – число, показывающее, во сколько раз электрическая сила, действующая на любой заряд в почве, меньше, чем в вакууме. Значение ε почвы зависит от диэлектрических свойств всех ее компонент, особенностей их геометрических характеристик и взаимодействия друг с другом, а также от частоты приложенного электромагнитного поля ω. К настоящему времени многочисленными экспериментальными исследованиями, ссылки на более ранние из которых можно найти в работах [1], а на более поздние в [2–4], установлено, что различные механизмы поляризации, действующие в почве, проявляют себя с разной интенсивностью в различных диапазонах ω. В частности, в диапазоне 1 МГц – 1 ГГц, за ε почв ответственны в основном механизмы дипольной поляризации. Поскольку датчик ЕС-5 работает на фиксированной частоте 70 МГц, это делает его максимально чувствительным к изменению содержания свободной почвенной влаги. Разработчикам датчика это дало основание, с некоторыми оговорками, предложить его в качестве универсального, не зависящего от других физических свойств почвы, измерителя объемной влажности θ. Однако в работах [5, 6] показано, что такой вывод имеет право на существование лишь в качестве первого приближения и при этом исключительно в стационарных условиях. В случае же использования датчика в качестве переносного прибора наши исследования определенно подтверждают этот результат – для градуировочной кривой датчика принципиально необходимо учитывать и плотность почвы ρ.
Для удобства пользователей датчик ЕС-5 имеет несколько шкал, одна из которых отградуирована в процентах объемной влажности. В нашей работе использовалась именно эта шкала. Прежде всего была изучена «глубинная характеристика датчиков» (ГХД) – зависимость показаний датчиков от глубины их погружения в почву. На рис. 1, Б приведены примеры, а на рис. 1, А результаты изучения ГХД на образцах почвы нарушенного сложения. Установлено, что ГХД состоит из двух участков. Первый участок, до глубины 5 см, соответствующий погружению в почву только измерительных зубцов датчика, близок к линейной зависимости с коэффициентом корреляции R ≥ 0,98. С практической точки зрения отметим, что до этой глубины датчик легко вводится в почву и извлекается из нее. При соответствующем навыке одно измерение проводится в течение 10–15 с. Второй участок, близкий к выходу на насыщение, соответствует погружению в почву, вслед за зубцами, всего корпуса датчика. На ГХД (рис. 1, Б) это соответствует снятию показаний датчика на глубине 8 см. Разработчики предлагают погружать датчики в почву вместе с корпусом, однако это оправдано либо при его стационарной установке, либо на рыхлых почвах (0,75–1,0 г см-3). В почву с высокой плотностью, особенно выше 1,3 г см-3, корпус датчика вводится с трудом, что при многократных измерениях, повышает риск его поломки. С другой стороны, зависимости между показаниями датчика при погружении его в почву на 5 см (d5) и на 8 см (d8) от влажности имеют практически один угол наклона (рис. 1, А). Поэтому во всем диапазоне увлажнения почвы разница между ними сводится к постоянной величине. Далее мы покажем, что разность между влажностью почвы θ и показанием датчика d8, вопреки утверждениям разработчиков, зависит от плотности почвы и в случае мобильного варианта использования датчика эту разность необходимо принимать во внимание. В результате не имеет значения, при какой глубине погружения датчика в почву проводить измерения – на 5 см или 8 см. При выборе более простого случая – d5 постоянная величина, упомянутая выше, автоматически включается в свободный член калибровочного уравнения, предварительно определяемого для каждой почвы на основе эмпирических данных.
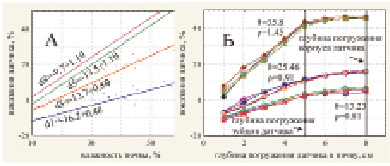
Рис. 1. А – линейные аппроксимации зависимостей между показаниями датчика (d) и влажностью почвы. Цифры (1, 3, 5, 8) у d обозначают глубину погружения зубцов датчика в почву. На глубинах 5 и 8 см углы наклона зависимостей практически совпадают. Б – примеры зависимостей показаний датчика в 4-х повторностях для 3-х вариантов увлажнения и уплотнения почвы нарушенного сложения. Разброс ГХД объясняется микронеоднородностями подготовленных образцов почв большого размера (100 см3). Места ввода датчика в почву находились на расстоянии 3–4 см друг от друга
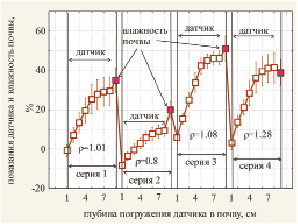
Рис. 2. Зависимости усредненных по влажности и плотности показаний датчиков от глубины погружения их в почву нарушенного сложения. Усиками обозначен ± 95 % доверительный интервал для средних значений. Серии объединяют показания датчика (пустые квадраты) и влажность почвы (закрашенные квадраты), определенную термостатно-весовым методом, и отличаются друг от друга средней плотностью почвы ρ. 1 серия – усреднение по всем 78 образцам, серии 2, 3, 4 – категоризованные по плотности показания датчика
Проведено два варианта измерений – на нарушенных и ненарушенных образцах почвы. Категоризованные по плотности результаты описательной статистики, полученные на 78 образцах почвы нарушенного сложения, приведены на диаграмме (рис. 2). Количественные зависимости в форме уравнений множественной линейной регрессии будут представлены ниже, но уже на качественном уровне видно, что при низкой плотности почвы ее влажность выше показаний датчика (θ > d), полностью погруженного в почву (8 см), а при высокой плотности – ниже (θ < d). Интерполяция представленных результатов показывает, что только при плотности 1,17 г см-3 показания датчика совпадают с влажностью почвы, определенной термостатно-весовым методом. При всех других плотностях почвы в градуировочных уравнениях датчика, погружаемого в почву на любую глубину, необходимо учитывать поправку, зависящую от плотности.
Все результаты показаний датчика, приводимые далее, получены при погружении в почву только его зубцов (5 см). На рис. 3 представлены 3 серии данных, относящихся к почвам ненарушенного (1 и 2 серии) и нарушенного (3 серия) сложения. Статистически обработанные данные свойств всех пяти почвенных полос (каждая площадью S = 1x5 м2) и нижележащих горизонтов приведены в табл. 1 и 2. Почва – темно-серая лесная, многолетняя залежь, перепаханная перед изучением на глубину 10 см. 1 серия – пахотный горизонт, отличается относительно большим, по сравнению с нижележащими горизонтами (2 серия), разбросом данных, характеризуемым среднеквадратичными отклонениями – SD, полученным в результате часто встречающихся пустот, заполненными скрученными жгутами травы. Тем не менее и для пахотного горизонта, и особенно для нижележащих с высокой надежностью (p – уровень меньше 0,01) прослеживается зависимость показаний датчика d не только от влажности почвы, но и от ее плотности. Для верхних, менее плотных горизонтов показания датчика меньше влажности почвы, для нижних горизонтов (30–40 см и 70–80 см), более плотных – выше.
Для сопоставления на рис. 3 приведены результаты сравнения показаний датчика d и влажности почвы θ нарушенного сложения для категоризованных по плотности ρ образцов почвы (3 серия). Видно, что с ростом ρ разность между θ и d, находясь в отрицательной области, стремится к нулю, а для плотности 1,4 г см-3 становится положительной. Этот результат подтверждает вышеописанный вывод: при низкой плотности почвы показания датчика меньше почвенной влажности, при высокой плотности – больше. Обратим внимание на то, что стандартные отклонения показаний датчика для почв ненарушенного сложения (1 и 2 серии на рис. 3) во всех случаях больше соответствующих стандартных отклонений для влажности почвы. Таким образом, как меры центральной тенденции (средние значения), так и меры изменчивости (дисперсии) свидетельствуют о том, что на показания датчика, помимо влажности, заметное влияние оказывает и плотность почвы. Высокие значения стандартных отклонений для промежуточных (1,0–1,2 г см-3) плотностей подготовленных образцов почв нарушенного сложения (серия 3 на рис. 3) связаны с механизмами устойчивости почвенной структуры и в настоящей работе не обсуждаются.
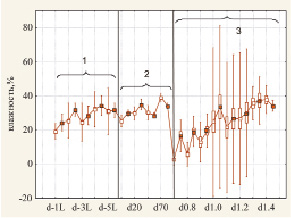
Рис. 3. Сравнение усредненных показаний датчика (нечетные пустые квадраты) и соответствующая им влажность почвы (четные закрашенные квадраты) для почв с нарушенной и ненарушенной структурой. Усиками обозначены стандартные отклонения SD для средних. 1 серия – 5 полос (d-1L – d-5L) пахотного горизонта (глубина 0–10 см, площадь каждой полосы S = 5 м2, количество повторностей измерения n = 30). 2 серия – горизонты 10–20, 20–30, 30–40, 70–80 см (S = 1 м2, n = 25). 3 серия – образцы почвы с нарушенным сложением, сгруппированные по плотности через равные промежутки 0.7, 0.8, 0.9 ...,1.3, – 1.4 г см-3, суммарная повторность n = 52. Данные следует сравнивать по парам: (1–2), (3–4), (5–6) и т.д.
Таблица 1
Статистические характеристики свойств полос пахотного горизонта 0–10 cм
|
mean |
SD |
mean |
SD |
mean |
SD |
mean |
SD |
mean |
SD |
|
|
полоса |
L1 |
L1 |
L2 |
L2 |
L3 |
L3 |
L4 |
L4 |
L5 |
L5 |
|
датчик |
19,27 |
2,265 |
25,41 |
5,131 |
24,57 |
5,651 |
32,31 |
5,17 |
30,89 |
6,801 |
|
повторность |
23 |
65 |
85 |
41 |
77 |
|||||
|
влажность |
24,34 |
2,371 |
31,82 |
1,885 |
28,51 |
2,709 |
34,18 |
2,869 |
31,66 |
2,108 |
|
повторность |
17 |
8–9 |
16–17 |
13–14 |
10 |
|||||
|
плотность |
0,979 |
0,062 |
0,96 |
0,058 |
1,011 |
0,07 |
1,043 |
0,068 |
1,067 |
0,056 |
|
повторность |
9 |
9 |
10 |
9–10 |
7 |
Таблица 2
Статистические характеристики нижележащих горизонтов почвы, 1х1 м2
|
mean 10–20 |
SD 10–20 |
mean 20–30 |
SD 20–30 |
mean 30–40 |
SD 30–40 |
Mean 70–80 |
SD 70–80 |
|
|
датчик |
25,443 |
1,722 |
29,792 |
1,872 |
30,179 |
2,022 |
39,186 |
1,186 |
|
повторность |
10 |
9 |
10 |
5 |
||||
|
влажность |
30,044 |
0,934 |
34,71 |
1,551 |
28,62 |
0,799 |
34,05 |
0,833 |
|
повторность |
5 |
4 |
5 |
4 |
||||
|
плотность |
1,181 |
0,083 |
1,127 |
0,066 |
1,340 |
0,043 |
1,421 |
0,029 |
|
повторность |
10–11 |
8 |
5 |
4 |
Результирующие зависимости между показаниями датчиков, влажностью почвы и ее плотностью можно представить следующими уравнениями множественной линейной регрессии:
нарушенное сложение почвы:

R2 = 0,97, Err = 1,613, (1)
ненарушенное сложение почвы, горизонты 10–20 см, 20–30 см, 30–40 см, 70–80 см, S = 1х1 м2:

R2 = 0,999, Err = 0,48, (2)
ненарушенное сложение, пахотный горизонт 0 – 10 см, S = 5х5 м2

R2 = 0,997, Err = 0,279 (3)
с высокой надежностью коэффициентов при ρ во всех трех случаях, р – уровень < 0,01.
На рис. 4 в качестве примера приведены усредненные зависимости влажности почвы от показаний датчика, рассчитанные по уравнениям (1) и (2) для двух значений плотности. Зависимость для пахотного горизонта не изображена, поскольку к параметрам уравнения (3) следует относиться с осторожностью. По причине, упомянутой выше, места взятия образцов почв для определения термостатно-весовым методом плотности и влажности почвы и места определения влажности почвы с помощью датчика могли находиться на расстоянии друг от друга 20–25 см. Поэтому уравнение для пахотного горизонта необходимо уточнить, но, предположительно его параметры не должны сильно отличаться от параметров уравнения (2), полученного на основании изучения 120 образцов почвы из 4 различных горизонтов и различной плотностью.
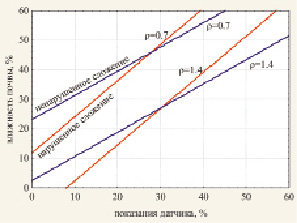
Рис. 4. Усредненные зависимости влажности почвы от показаний датчика для двух плотностей, рассчитанные по уравнениям (1) и (2)
В табл. 1 и 2 строки «повторности» относятся к физическому свойству, приведенному в предыдущей строке. Они обозначают количество измерений, необходимых для того, чтобы с надежностью 95 % генеральное среднее значение соответствующего свойства попало в 5 % доверительный интервал (mean ± 5 %). Расчет проводится с использованием известного выражения для доверительного интервала [5]:
 (4)
(4)
где μ – генеральное среднее, mean – выборочное среднее, σ – среднеквадратичное отклонение, tα – критерий Стьюдента для заданного уровня значимости α (в нашем случае 0,05), n – количество повторностей.
Таким образом последовательность действий при определении влажности почвы с помощью датчика сводится к выполнению следующих действий:
1. На заданной площадке определяются выборочные статистические параметры плотности ρ (среднее и стандартное отклонение). Рассчитывается необходимое количество повторностей, которое с заданной надежностью и точностью обеспечит попадание генерального среднего в заданный доверительный интервал. Этот пункт программы является предварительным и выполняется однократно. Пример: 10–11 определений ρ для горизонта 10–20 см, площадью S = 1х1 м2 (табл. 2).
2. Основная программа действий – аналогично п. 1 определяется количество повторностей, чтобы с заданной точностью и надежностью определить среднюю влажность почвы с помощью датчика d (показания датчика). Пример: 10 измерений d для горизонта 10–20 см (табл. 2).
3. Полученные средние значения ρ и d подставляются в уравнение (2) и рассчитывается средняя влажность почвы θ для заданного участка.
Методика расчета количества повторностей является стандартной и в нашем случае выглядит следующим образом: рассчитывается 5 % величина от выборочного среднего mean и делится на среднеквадратичное отклонение. По полученному числу определяется необходимое количество повторностей n.
Выводы
Датчик ЕС-5 Decagon исходно предназначен для применения в стационарных условиях. При условии выполнения методических исследований, описанных в настоящей работе, датчик можно использовать как переносной прибор для изучения пространственно-временной неоднородности влажности почв. Используя переносной компьютер, можно существенно сократить время определения влажности, воспользовавшись опцией мгновенного измерения. При этом измерения удобнее проводить с одним датчиком (а не с пятью).
Принципиально важным с практической точки зрения является вопрос о затраченном времени определения влажности почв с помощью датчика. Можно дать следующую оценку: на 10 повторностей измерения на 1 м2 затрачивается менее 5 мин. С учетом записи показаний и последующем расчете, на определение влажности на этом участке уходит 10 мин. На определение влажности термостатно-весовым методом для такого же участка с таким же количеством повторностей уходит около 15–24 часов. Таким образом новая методика характеризуется существенным, на два порядка, выигрышем по времени.
Библиографическая ссылка
Чичулин А.В. К МЕТОДИКЕ ПРИМЕНЕНИЯ ДАТЧИКА ВЛАЖНОСТИ ЕС-5 DECAGON // Международный журнал прикладных и фундаментальных исследований. 2018. № 5-2. С. 416-421;URL: https://applied-research.ru/en/article/view?id=12280 (дата обращения: 31.07.2026).