
Scientific journal
International Journal of Applied and fundamental research
ISSN 1996-3955
ИФ РИНЦ = 0,556
ASPECTS OF OCEANOLOGY RESEARCH TECHNOLOGY USING TOWED VEHICLES

Измерения в океане имеют общее свойство – практически все они производятся движущимися приборами. Это движение может быть вызвано тактикой исследования – буксировка или зондирование, либо оно связано с течением или дрейфом. Кроме того, важным преимуществом буксируемых приборов (аппаратов) является возможность оперативного обследования обширных акваторий с одновременным использованием целого комплекса измерительных устройств. Скорость движения буксируемых аппаратов относительно среды может лежать в пределах от единиц до сотен сантиметров в секунду. В условиях сложной структуры распределения гидрологических параметров среды и морфологии рельефа дна по пространству, при движении аппаратов могут возникать ошибки и искажения получаемых изображений поверхности дна и подводных объектов.
В этой связи актуальной проблемой является разработка и исследование основных критериев выбора оптимальной скорости буксировки подводных аппаратов, предназначенных для обследования поверхности дна и придонного пограничного слоя [1], исходя из требований, налагаемых условиями работы всего аппаратурного комплекса, и технических возможностей входящих в него систем.
Цель работы: повышение эффективности, в том числе производительности и безопасности использования подводных буксируемых аппаратов для исследования поверхности дна придонной области акваторий.
Для достижения цели работы необходимо решить круг задач, связанных с исследованием влияния следующих факторов на величину максимально допустимой скорости движения (буксировки) подводных аппаратов:
1) допустимая длина кабель-троса, необходимая для обеспечения буксировки аппарата на заданной глубине;
2) возможность обнаружения поисковыми средствами подводных объектов заданного минимального размера;
3) возможность получения требуемой четкости телевизионного изображения;
4) допустимая частота поступления телевизионной информации к оператору;
5) возможность проведения маршрутной видео(фото)съемки донной поверхности;
6) безопасность буксировки аппарата над пересеченным рельефом.
Решение этих задач позволит получить значения и расчетные соотношения для предельно допустимых скоростей движения при исследовании поверхности дна придонной области акваторий.
Материалы и методы исследования
Для решения перечисленных задач в работе применены методы анализа и синтеза технологий визуальных и дистанционных средств подводных исследований с использованием: положений механики подводных буксируемых систем, основ гидроакустики и оптики, теории представления и обработки видео и гидролокационной информации, а также геоморфологии рельефа океанского дна.
Рассмотрим факторы, определяющие величину скорости буксировки, являющуюся главным методическим аспектом повышения производительности исследований с использованием подводных буксируемых аппаратов.
Допустимая длина кабель-троса. Из-за лобового сопротивления аппарата и кабеля угол отклонения кабеля от вертикали увеличивается с возрастанием скорости буксировки. Поэтому для достижения аппаратом некоторой глубины Нa необходима длина кабеля LK > Нa . При работе на больших глубинах это ограничивает скорость буксировки: во-первых, из-за технических ограничений предельной длины кабелей, изготовляемых на заводах, во-вторых, из-за ухудшения динамики управления аппаратом при больших длинах кабеля.
В Институте океанологии [2, 3] методами численного интегрирования рассчитаны длины кабеля, необходимые для достижения заданных глубин при различных скоростях буксировки. Диаметр кабель-троса был принят равным 24 мм, диапазон расчетных скоростей буксировки – 0,5÷2,0 м/с, диапазон отрицательной плавучести аппарата – 700–1400 кг. Обобщенная расчетная зависимость LK/Ha = f(v) представлена на рис. 1. Она нелинейная, и крутизна ее резко увеличивается при скоростях, превышающих 0,75 м/с. Из этого следует, что оптимальной с точки зрения минимизации длины кабеля является скорость, не превышающая 0,5–0,75 м/с. При этом требуемая длина кабеля превышает величину заглубления аппарата не более чем на 20 %.
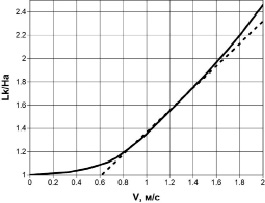
Рис. 1. Зависимость относительной длины буксирной линии от скорости буксировки аппарата
Возможность обнаружения подводных объектов заданного размера с помощью гидроакустических устройств. Одним из основных гидроакустических устройств буксируемых аппаратов являются гидролокаторы бокового обзора (ГБО). Применительно к ним оценим допустимые скорости буксировки носителя ГБО.
Для ГБО различают разрешающую способность по дальности l и – по углу l1. Разрешающая способность по дальности характеризует минимальное расстояние между двумя точечными объектами по направлению нулевого луча, при котором эти объекты регистрируются раздельно. l = cτ/2, где c – скорость распространения звука в воде, а τ – длительность излучаемого акустического импульса.
Масштаб записи эхо-сигнала в направлении нулевого луча Ml = L/a, где L – выбранный диапазон дальности регистратора, сигнала на регистраторе, a – ширина записи эхо-сигнала на регистраторе,
L = cT/2, (1)
причем Т – период следования зондирующих импульсов.
Как следует из определения величины l, эта величина зависит только от длительности акустических посылок и не связана со скоростью движения антенны относительно дна.
Разрешающая способность по углу l1 является параметром, характеризующим минимальное расстояние между двумя точечными объектами в направлении нормальном нулевому лучу, при котором эти объекты регистрируются раздельно.
Объект продолжает оставаться видимым, если находится в зоне диаграммы направленности ГБО и при этом выполняется соотношение
Φ2(α) = 0,5Φ2(α0,5), (2)
где Φ(α) – характеристика направленности антенны, α0,5 – половинный угол раскрыва характеристики направленности антенны по уровню половинной мощности акустической посылки.
Из условия (4.4) следует выражение для разрешающей способности по углу
l1 = 2 L tg α0,5. (3)
В течение периода акустических посылок (Т) буксируемый аппарат проходит расстояние l = VT, где V – скорость поступательного движения аппарата.
Считая, что условием надежной регистрации объекта является наличие с ним менее десяти акустических контактов, получим
l1 = 10l T = δ = VT, (4)
где δ – линейный размер регистрируемого объекта.
Из (1), (3) и (4) получаем выражение для определения максимально допустимой скорости буксировки:
V = δ C / 20 L. (5)
Из (5) следует, что величина предельной скорости движения аппарата пропорциональна размеру регистрируемого объекта и обратно пропорциональна диапазону дальности ГБО.
При проведении геофизических исследований наиболее широко используются ГБО с L ≈ 600 м. Расчеты по формуле (5) показывают, что с помощью таких ГБО при скорости буксировки до 1,5 м/с можно регистрировать объекты с минимальными размерами около 12 м, а при скорости 0,5 м/с – 4 м.
Допустимая частота поступления видеоинформации к оператору (влияние скорости буксировки на субъективное восприятие оператора). Управление аппаратом в режиме буксировки при визуальном контакте с дном связано с поступлением к оператору от видеомонитора непрерывно изменяющейся информации [4]. Частота обновления информации зависит от характера рельефа, скорости движения аппарата и горизонта буксировки. При чрезмерно высоких скоростях движения и малых расстояниях аппарата до дна оператор не справляется с потоком видеоинформации, что приводит к ее частичной потере. При малых скоростях движения информация поступает медленнее, чем скорость восприятия оператора, в результате чего непроизводительно затрачивается время, отведенное на буксировку. Для определения оптимальных скоростей буксировки были выполнены натурные исследования [5]. Передающая телевизионная камера, снабженная объективом с фокусным расстоянием 10 мм, была укреплена на тележке, перемещаемой на дне по рельсам. Расстояние камеры до грунта изменялось в диапазоне 0,5–1,1 м, скорость тележки – от 0,1 м/с до 0,7 м/с. В опытах участвовали три оператора, дававшие независимые оценки скорости перемещения изображения дна на экране видеомонитора. Наиболее благоприятным для оператора оказался такой режим движения аппарата, при котором скорость перемещения изображения по матрице передающей камеры составляет VФ = 3 мм/с. Оптимальные скорости аппарата при движении на расстояниях 15 и 10 м вычисляются из уравнения VФ = V(F/H), где F – фокусное расстояние объектива. Например, при объективе с фокусным расстоянием 20 мм значения V соответственно равны 0,15; 0,75; 1,50 м/с.
Возможность проведения маршрутной фотосъемки донной поверхности. Фотосистемы на буксируемых аппаратах могут работать в двух режимах: автоматическом, обеспечивающим непрерывное фотографирование с заданной частотой кадров в секунду (минуту), и целенаправленном под управлением оператора.
Работа фотосистемы в первом режиме целесообразна в тех случаях, когда необходимо получить изображение достаточно протяженного участка рельефа с четкостью большей, чем это обеспечивается видеозаписью. Очевидно, что такой режим работы оправдан, если характер исследуемого участка дна непрерывно изменяется. Работа в этом режиме характеризуется большими потреблениями электроэнергии импульсными источниками света, возрастающими с увеличением частоты съемки, а также требует применения емких накопителей информации (флеш-память, HDD).
Работа системы во втором режиме фотографирования обладает тем преимуществом, что ввиду малого потребления электроэнергии позволяет ограничиваться бортовыми источниками небольшой емкости, либо, при передаче электропитания с судна, существенно упростить систему энергопередачи. Использование фотосистемы в таком режиме целесообразно при фотографировании отдельных небольших (соизмеримых с зоной видимости фотообъектива) наиболее характерных участков дна.
Определим допустимую скорость буксировки, позволяющую в режиме маршрутной съемки выполнять фотографирование донной поверхности с требуемым перекрытием β соседних кадров. При расстоянии аппарата до дна, равном Н, ширина участка дна, попадающего в поле зрения фотообъектива, составляет A = (H / FФ)×hФК, где FФ – фокусное расстояние объектива и hФК – высота фотокадра. По определению (1 – β) = (V×τФК) / H = (FФ×τФК) / (H×hФК), где τФК – период фотосъемки. Тогда искомая величина V ≤ ((1 – β)×H×hФК) / (FФ× τФК).
Эта зависимость приведена на рис. 2 для типичных параметров фотоустановки: FФ = 16 мм, hФК = 18 мм при условии обеспечения 20 % перекрытия фотокадров.
Если буксируемый аппарат имеет отрицательную плавучесть, а буксировка осуществляется без углубителя, то качка кормы судна (точки схода кабель-троса с буксирного рола) передается на аппарат практически без демпфирования. Поэтому для предохранения аппарата от столкновения с дном необходимо пилотировать его на расстоянии порядка 5–10 м от дна. На рис. 2 представлена расчетная зависимость периода фотосъемки от скорости буксировки на расстоянии до дна 5 м при условии получения 20 % перекрытия соседних кадров.
Обеспечение безопасности буксировки аппарата над пересеченным рельефом. Для обеспечения безопасности буксировки аппараты оснащаются акустическими средствами, позволяющими определять наличие препятствий по курсу [6]. Одним из таких средств является вперед направленный гидролокатор.
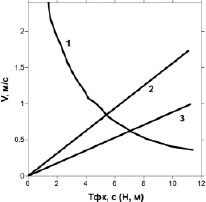
Рис. 2. Зависимость скорости буксировки от требуемого периода фотосъемки при маршрутном фотографировании дна с расстояния 5 м (кривая 1). Зависимость предельно допустимой скорости буксировки от расстояния до дна при периоде фотосъемки, равном: 2–5 с (кривая 2); 3–10 с (кривая 3)
В общем случае траектория движения аппарата может изменяться путем перемены курса и хода судна, либо изменением длины буксирной линии. Первый способ является весьма инерционным. Реакция аппарата, буксируемого на кабель-тросе длиной несколько тысяч метров, запаздывает по отношению к изменению параметров движения судна-буксировщика на время от десятков минут до нескольких часов. Таким образом, данный способ управления малоэффективен, если необходимо оперативно изменить траекторию аппарата с целью обхода препятствия.
Более оперативным (с задержкой в секунды) является управление путем изменения длины буксирной линии. Именно этот способ следует признать наиболее действенным для предотвращения столкновения буксируемого аппарата с препятствием. Определим взаимосвязь скорости буксировки с предельной высотой препятствия HП, которое может преодолеть аппарат. Предполагаем, что аппарат имеет отрицательную плавучесть и равномерно движется в горизонтальной плоскости. Аппарат огибает препятствие, если
VZ×tП > HП,
где VZ – максимальная скорость вертикального перемещения аппарата под действием тянущего усилия лебедки, tП – время вертикального перемещения аппарата.
Интервал времени tЗ от момента фиксации эхолотом препятствия до начала подъема аппарата определяет запаздывание реакции системы «пилот – лебедка – кабель» и составляет
tЗ = tРП + tРС,
где tРП – время реакции пилота от момента опознавания препятствия до включения лебедки на подъем аппарата, tРС – время реакции лебедки и кабеля от момента включения лебедки на подъем до начала перемещения аппарата. Результаты натурных испытаний буксируемых комплексов показали, что время запаздывания может изменяться в пределах 7–12 с.
Расстояние Lх, проходимое аппаратом в горизонтальной плоскости за время с момента обнаружения препятствия до момента окончания подъема, составляет
Lх = V×(tЗ + tП). (6)
Из (4.13) и (4.14) определяем максимальную скорость буксировки, при которой можно избежать столкновения аппарата с препятствием высотой HП, расположенным на его курсе:
V < (Lх×VZ) / (VZ×tЗ + HП),
где Lх – требуемая величина дальности действия впереднаправленного эхолота.
На рис. 3 представлена зависимость величины V от величины HП/Lx, при условии, когда максимальная дальность действия эхолота составляет Lх = 100 м, а максимальная скорость вращения лебедки обеспечивает намотку кабеля со скоростью VZ = 1 м/с.
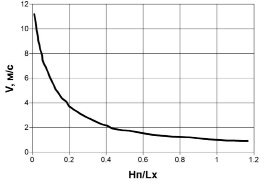
Рис. 3. Зависимость предельно допустимой скорости буксировки от относительной высоты препятствия для условия безопасности пилотирования аппарата
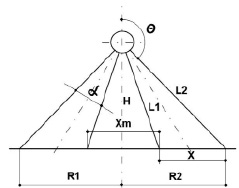
Рис. 4. Ориентация характеристики направленности антенн и зоны обзора ГБО
Режимы работы буксируемого аппарата при обследовании донной поверхности гидролокаторами бокового обзора. Зоной обзора ГБО назовем участок дна, облучаемый антенной гидролокатора. В процессе буксировки носителя движение последнего может отличаться от прямолинейного и равномерного. Ориентация носителя в пространстве тоже может изменяться. Неравномерность движения и непостоянство ориентации антенны приводят к тому, что на границе зоны обзора могут возникать неопределенности зоны обзора – те участки дна, обзор которых не гарантируется. При обследовании полигона путем буксировки аппарата на параллельных галсах расстояние между галсами следует выбирать из условия, чтобы зоны обзора гидролокатора на соседних галсах перекрывались как раз на величину неопределенности зоны обзора. Ошибка ΔXH привязки гидроакустических профилей в географической системе координат накладывает требование еще большего перекрытия этих профилей и таким образом косвенно влияет на величину неопределенности зоны обзора ГБО.
Ориентацию антенны гидролокатора относительно дна удобно представить в виде составляющих: ориентации ее относительно вертикальной оси буксируемого необитаемого подводного аппарата (БНПА) и углов колебаний БНПА по крену, рысканию и дифференту.
Расстояние БНПА до дна также удобно представить как сумму величины расстояния при стационарном режиме буксировки (равномерное прямолинейное движение) и величины амплитуды колебаний БА относительно этого уровня [7, 8]. Таким образом, в общем случае на величину реальной зоны видимости ГБО влияют следующие параметры (рис. 4):
– ориентация антенн ГБО на носителе – Q;
– расстояние БНПА до дна – Н;
– величина максимальной наклонной дальности ГБО – L м;
– угол раскрыва характеристики направленности антенны ГБО – α;
– колебание БНПА по углам крена, курса и дифферента;
– непостоянство расстояния БНПА до дна – ΔН;
– рефракция звукового луча;
– неопределенность местоположения БНПА – ΔXH.
Ввиду малости расстояния БНПА до дна можно считать, что звуковые лучи распространяются прямолинейно, то есть явление рефракции пренебрежимо мало.
Очевидным представляется факт преобладающего влияния на величину реальной зоны обзора колебаний носителя по углу крена по сравнению с колебаниями по курсу и дифферента.
При таких предположениях величина реальной зоны обзора ГБО зависит лишь от следующих факторов: ориентации антенн на аппарате, расстояния БНПА до дна, величины максимальной наклонной дальности действия ГБО, ширины диаграммы направленности, колебаний БНПА по углу крена αК, непостоянства расстояния БНПА до дна, погрешности привязки места носителя к географической системе координат. Последние три фактора назовем возмущающими.
Поставим перед буксируемой гидроакустической системой задачу полного обследования полигона шириной АП за наименьшее время. Если допустить, что характеристики ГБО и значения возмущающих факторов заданы, то остаются два фактора, меняя которые мы можем влиять на величину реальной зоны видимости системы – ориентация антенн на носителе (Q) и расстояние БНПА до дна (Н). Таким образом, задача сводится к отысканию алгоритма выбора оптимальных ориентаций антенн ГБО, расстояния БНПА до дна и маршрута буксировки.
Для получения максимальной величины зоны видимости ГБО выберем расстояние до дна таким образом, чтобы расстояние до дна по крайнему лучу L1, равнялось LМ, то есть
H = LM×cos [(2π – α – 2Q) / 2]. (7)
Найдем выражение для величины зоны обзора при принятых выше допущениях. Горизонтальные проекции крайних лучей L1 и L2 (рис. 4) определяются как
R1 = H×tg [arc cos (H / LM)], (8)
R2 = H×tg [arc cos (H / LM) – α]. (9)
С учетом (4.16) и (4.17) зона видимости локатора определится как
X = R1 – R2 = H×tg [arc cos (H / LM)] –
– H×tg [arc cos (H / LM) – α].
Вследствие независимости воздействия возмущающих факторов, величины неопределенностей зон видимости по крайним лучам L1 и L2 могут быть вычислены, исходя из соотношения
(ΔX1)2 = H2{tg [arc cos (H / LM)] – tg arc cos (H / LM) – αK]}2 + ΔH2×tg2 [arc cos (H / LM)] + (ΔXH)2, ΔX2)2 = H2{tg [arc cos (H / LM) – α] – tg [arc cos (H / LM) – α – αK]}2 + ΔH2×tg2 [arc cos (H / LM) – α] + (ΔXH)2.
Величины реальной зоны видимости (ẍ) и мертвой зоны (ẍМ) определяются соотношениями: ẍ = X –ΔX1 – ΔX2 и ẍМ = 2R2 + 2ΔX2. Представим величину мертвой зоны:
ẍМ = nẍ + X'M, (10)
где n = ẍМ / ẍ – целое число, округляемое в меньшую сторону, а X'M – остаток.
Для полного обследования участка дна между крайними лучами ГБО необходимо проложить (n + 2) галсов. При этом будет обследована площадь по ширине большая, чем 2(Х + R2), а именно: S = 2(n + 1)×ẍ + X'M.
На последнем галсе при осмотре мертвой зоны используется не вся величина реальной зоны обзора ГБО ẍ, а только ее часть X'M < ẍ, т.е. эффективность ГБО снижается. Этот недостаток можно устранить, если выбирать ориентацию антенны локатора и отстояние аппарата от дна (увеличивая Q и Н) таким образом, чтобы выполнялось условие
ẍМ = n ẍ. (11)
В этом случае для осмотра указанного участка дна потребуется проложить (n + 1) галсов. Соответственно, ширина полигона составит S = 2 (n + 1)ẍ. Однако при увеличении Q уменьшается X. Поэтому для выбора оптимальной ориентации антенн необходимо сравнивать эффективные площади, обследуемые БА за один галс при различных Q.
Полным циклом галсов назовем число (n + 2), соответствующее минимальному количеству галсов, необходимому для полного обследования участка дна между крайними лучами L1 ГБО при ориентации антенн в соответствии с соотношением (10). Для условия (11) полному циклу соответствует (n + 1) галс.
Определим число галсов, необходимое для полного обследования полигона при выбранной ориентации антенн и, следовательно, при известных значениях ẍ и ẍМ . Представим ширину полигона АП в виде АП = M S + mx, где М – целое число полных циклов галсов; m – дополнительное число галсов необходимое для обследования оставшейся части полигона, (то есть, не охваченной полными циклами галсов).
Тогда при режиме, соответствующем условию (10), полное число галсов, необходимое для обследования полигона шириной АП, составит N = M (n + 2) + m1. Для режима буксировки, соответствующему условию (11) N = M (n + 1) + m1.
Оптимальным следует считать такие значения Q и Н, при которых N будет минимальным. Практически выбор ориентации антенн и расстояния БНПА до дна сводится к численному счету N для всех вариантов Q и Н, начиная с минимальных с постепенным увеличением этих значений согласно уравнению (7) до того момента, пока не реализуется условие (11). Дальнейшее увеличение Q и Н нецелесообразно.
Аналогичный подход можно применять во всех случаях, когда требуется провести сплошное обследование некоторого района с помощью буксируемого или самодвижущегося носителя, оснащенного измерительной аппаратурой с известной зоной чувствительности.
Результаты исследования и их обсуждение
Проведенный анализ механизмов влияния скорости буксировки исследовательских аппаратурных комплексов на качество получаемой ими информации и безопасность проведения подводно-технических работ позволяет получить значения и расчетные соотношения для предельно допустимых скоростей движения при исследовании поверхности дна придонной области акваторий. Так оптимальная скорость глубоководной буксировки подводного аппарата составляет 0,50–0,75 м/с (1,0–1,5 узла). Задача обнаружения подводных объектов и элементов рельефа дна требуемого размера решается при скорости обследования не превышающей значение δС / 20 L. Требуемая четкость видеоизображения может быть получена на скоростях, не превышающих величину 0,5×(hФ / ZK×TH )×(H/F). При скорости буксировки < (3H / F)×10-3 может быть реализована требуемая (заданная) частота поступления видеоинформации. Оптимальные условия проведения маршрутной фотосъемки обеспечиваются при скоростях обследования, не превышающих величину ((1 – β)×H×hФК) / (FФ× τФК). Для обеспечения безопасности буксировки вблизи дна в районах с пересеченным рельефом следует придерживаться условий, при которых скорость буксировки не должна превышать значение (Lх×VZ) / (VZ×tЗ + HП). Оптимальность технологии гидролокационной съемки определяется по условию минимизации числа галсов маршрута обследования полигонов.
Выводы
Таким образом в статье решены главные аспекты проблемы повышения эффективности подводных исследований с использованием подводных буксируемых аппаратов на основе анализа основных критериев выбора оптимальной скорости буксировки подводных аппаратов, предназначенных для обследования поверхности дна и придонного пограничного слоя [1], исходя из требований, налагаемых условиями работы аппарата, и технических возможностей, его приборного оснащения.
Работа выполнена в рамках госзадания ФАНО России (тема № 0149-2018-0010) при частичной поддержке РФФИ (проект Рго_а № 17-05-41041) и РНФ (проект 14-50-00095).
Библиографическая ссылка
Римский-Корсаков Н.А., Лискин В.А., Зарецкий А.В. АСПЕКТЫ ТЕХНОЛОГИИ ОКЕАНОЛОГИЧЕСКИХ ИССЛЕДОВАНИЙ С ИСПОЛЬЗОВАНИЕМ БУКСИРУЕМЫХ АППАРАТОВ // Международный журнал прикладных и фундаментальных исследований. 2018. № 7. С. 37-43;URL: https://applied-research.ru/en/article/view?id=12326 (дата обращения: 14.07.2026).
DOI: https://doi.org/10.17513/mjpfi.12326