
Scientific journal
International Journal of Applied and fundamental research
ISSN 1996-3955
ИФ РИНЦ = 0,556
THE DIRECTION OF THE FUTURE DEVELOPMENT OF ADAPTIVE ENERGY SYSTEMS FOR AUTONOMOUS UNDERWATER VEHICLES

Нет нужды убеждать, как важно изучать свойства Океана. Океан – это жидкая среда, взаимодействующая с газообразной атмосферой. А если честно, учесть ещё и гравитацию и излучение Солнца и влияние других планет, то вот этот основной набор факторов, которые формируют среду нашего обитания и наше мировоззрение, главное в котором – это вопрос: «Как выживать?» Поверхность Океана составляет примерно 70 % от поверхности земной сферы – это же поверхность взаимодействия обеих сред, место, где рождаются штормы, тайфуны и ураганы. Разумеется, для людей главное предсказать: где, когда, с какой силой и в каком направлении «обрушит стихия свой гнев». Люди давно поняли, что для изучения Океана нужны приборы и измерительные устройства для двух сред: поскольку вода в 1000 раз тяжелее и также более вязкая, чем воздух, то она лучше и дольше сохраняет кинетическую энергию, вызванную ветровым воздействием, что позволяет отделять устойчивые тепловые течения от поверхностных, ветровых.
Таким образом, для предсказания погоды целью является создание механизма предсказания, основанного на глобальных измерениях за счёт естественных источников энергии, а также построение теории вычисления прогнозирования на основе постоянных и глобальных измерений.
Сегодня наука обладает большим арсеналом: приборов, судов научных организаций, финансовых средств и т.п. возможностей для предсказания погоды, метео-климатических и стихийных явлений. Точечные измерения прибрежными приборами и приборами на дрифтерах с буями изначально использовались для измерения приповерхностных параметров воды и параметров надповерхностной атмосферы, таких как давление, солёность, температура, скорость, направления течений и направление дрейфа, а также для записи измеренных данных. Они не требуют источников энергии для передвижения, так как дрейфуют за счёт течений и парусности. Со временем они совершенствовались с ростом технологий. С развитием техники возникли и развились подлёдные дрифтенговые измерения в Арктическом, экономически очень важном регионе [1]. Они тоже не требуют энергии для движения. Но для определения метеопрогноза погоды нужно иметь одновременные глобальные измерения приповерхностных гидрологических и метеопараметров со всей площади акватории. Такая возможность возникла с появлением спутниковых технологий – GPS, когда на каждый квадрат 500×500 м можно было использовать, по крайней мере, один дрифтер-измеритель. Наконец, возникла международная кооперация в виде ряда международных программ глобального наблюдения – «Дрифтерная измерительно-информационная система оперативного контроля морских акваторий» [2]. Сотни различных буев (примерно 1250 буёв-дрифтеров) запускались в Мировом океане по всем международным программам для решения задач численного моделирования погоды и контроля изменчивости климата. Электробатареи использовались лишь для связи и обеспечения измерений. Россия постоянно и успешно участвовала в этой работе.
Этот успех явился основой создания проекта ARGO – первой попыткой организации постоянно действующей глобальной сети океанографических станций на основе действующих буев-измерителей, составляющих основу новой науки: оперативной океанологии. Предложенный впервые в 1999 г. проект был одобрен Международной океанографической комиссией, Всемирной Метеорологической организацией и начал воплощаться в жизнь в 2000 г. как проект ARGO в составе программ CLIVAR и GODAE (GOV) [3]. Профилирующие буи в программе ARGO существуют в Модификациях Apex и Provor. Они умеют занимать и менять горизонт дрейфа и обмениваться информацией со спутником. Однако большой объем расходов по проекту пришлось распределить между странами-участницами, каждая из которых должна за свой счет закупить, разместить в океане посильное количество буев, а также принимать и распространять информацию, полученную с них. В этом и есть метод глобальной коллективной работы.
В международном проекте в настоящее время принимают участие все развитые и развивающиеся страны, включая США, Канаду, Австралию, Новую Зеландию, Японию, Южную Корею, Индию, страны Европейского союза совокупно и раздельно (Франция, Германия, Великобритания, Дания, Испания). Широкое представительство государств в проекте обеспечит финансирование проекта в накоплении, обработке и анализе данных. Вместе с данными измерений температуры и солености (электропроводности) дрейфующие буи обеспечивают также и данные о течениях на двух горизонтах (заданной глубине дрейфа и поверхности). Полученные данные, вместе со спутниковыми измерениями, полученные возвышения поверхности океана, позволяют определить характеристики течения от поверхности до горизонта дрейфа. Первичный (оперативный) поток данных поступает в глобальную метеорологическую сеть (ГСТ) после первичного контроля. Для проекта ARGO (в США – Apex и во Франции – Provor) приняты следующие установочные параметры буев: нижний горизонт измерений – 2000 м, а дискретность измерений – 10 дней. Полученные через спутник данные от буев ARGO проверяются. Их координаты и точность в течение суток передаются в глобальную метеосеть, т.е. становятся доступными всем странам-участникам. После более детального контроля качества данных они передаются в два глобальных центра ARGO. Российский опыт участия в программе ARGO состоялся в рамках сотрудничества с Японией в Японском море (1999–2002 гг.) и затем в Охотском море (30 буев) в измерениях СТД и скоростей дрейфа. Результаты дали интересный материал и были включены в общую карту состояния акваторий. Однако работа не была поддержана государством и заглохла. Надо отметить, что посильное участие в программе ARGO нужно всем, не только России и США. И можно не сомневаться, что в отличие от РФ, США имеют не только общую картину гидрологии, но и термодинамики. За время с 1999 г. буи ARGO сделали измерений больше чем все научные суда за весь 20 век. Сегодня в программе ARGO в изучении Океана занято более 5000 аппаратов Apex и Provor. И число их постоянно множится.
Параллельно с этим, в океане работает огромная армия исследователей со сканирующими буями на стационарных станциях, целью которых является измерение гидрологических, гидрохимических и термодинамических параметров водной среды. При этом глубины могут достигать сотен метров и даже нескольких километров. В этом случае для обеспечения процесса измерения может потребоваться внешний источник энергии или судно-носитель.
Сама по себе сила водоизмещения способна перемещать аппарат только по вертикали, как, например, в буе-профилометре «Аpex», или «Provоr», но если управлять поверхностными силами, так чтобы сформировать осевую равнодействующую поверхностных сил, то при управлении дифферентом, соотношением сил веса и водоизмещения, возможно получить планирующее движение в толще воды по пилообразной траектории. Тип таких аппаратов и получил название «глайдеры» (Slocum, Spray, Seaglider, Coastal Glider и др.). Для управления водоизмещением разработаны технические решения перемещения веса аппарата без изменения водоизмещения за счет тепловой энергии внешней среды, которую используют для изменения удельного объема рабочих тел, таких как парафины или низкокипящие хладагенты. И те и другие рабочие тела способны воспринимать тепловую энергию морской воды за счет фазовых изменений агрегатного состояния и изменения фазы твердых растворов (например, парафины).
Разработано большое количество низкокипящих хладагентов. Оценки их использования для извлечения энергии из тепловых градиентов океана показали их перспективность. В этой связи представляется важным провести методом сравнительного анализа обсуждение их термодинамических свойств на какой-либо модели, например, теплового насоса. В основе работы такой модели лежит фазовый переход кипения и конденсации рабочего тела. Методически, зная термодинамические свойства конкретного хладагента, можно подсчитать его прибавочную плавучесть из уравнений термодинамики и гидростатики, пренебрегая в первом приближении потерями тепла на нагрев конструкции и теплоотвод в среду. Давлением газа, Р0 в шар-баллоне задают глубину погружения. Обозначим R0 – радиус гидроаккумулятора и V – его объём, R – радиус поршня в камере, r – радиус штока изменения водоизмещения; dP и dV, cоответственно, – изменение давления и объёма насыщенного равновесного: P1 давление нагретого насыщенного пара на поверхности при T1, и соответственно, P2 и T2 – тоже на глубине погружения после охлаждения и конденсации парогаза. Разность давлений dP зависит от разности температур и свойств хладагента. Например, для трифтормонохлорметана разность T2 – T1 = 150 даёт dP = 9,915 атм давления насыщенного пара при погружении на глубину 1000 м. Аналогичные оценки можно сделать и для других хладагентов [4] по формуле
dV = V{1 – (P2 R2 T1) / [Pа r2 + (P1 + dP)(R2 – r2)T2]}.
Величина dP = f(P1(T1) – P2(T2) – свойство рабочего тела, т.е. (dP/dT) определяется его химическим составом. Обсуждение результата показывает, что по сравнению с парафинами низкокипящие рабочие тела имеют большую зависимость (dP/dT) и менее инерционны.
Другой способ утилизации тепловой энергии используют в глайдерах – подводных аппаратах автоматической автономной измерительной техники – глиссирующие подводные «планеры» по пилообразной траектории, использующие для движения как активные электрические движители, так и механизмы, создающие движущую силу за счет управления плавучестью, используя принцип теплового насоса и низкокипящие жидкости. Таким образом, имея в составе аппарата (глайдера) блок управляемого объёма и массы аппарата постоянной величины, появляется возможность управлять движением, например, формировать пилообразную траекторию. Находясь на водной поверхности, где в экваториальных морях температуры могут достигать 25–30 °С, а давление у поверхности Pа,~1 атм, испарение хладагента активное и равновесное давление насыщенного пара достигает значительных величин: 20–30 ати и более. Основоположники этого направления Henry Stommel и Doug Webb (www.webbresearch.com). Первый успешный аппарат, использующий тепловые градиенты воды для отбора энергии движения, был Slocum 1989.
Рабочее тело Slocum – парафин (8 % на 160 нагрева), который изменяет плотность при нагревании и охлаждении. Это давало возможность менять водоизмещение, т.е. плавучесть. В зависимости от температуры и компонент парафины могут образовывать эвтектику, переходящую в твердые растворы. Такой аппарат теоретически может двигаться неограниченно долго. Скорость его около 1 км/ч. На поверхности он определяется с помощью GPS и передает измеренную информацию.
Развитие GPS и проект ARGO позволили организовать глобальную сеть океанографических автоматических станций – дрейфующих буев измерителей (Apex и Provor), которые, снабжая измеренной информацией, при этом умеют управлять горизонтом погружений. Программа, одобренная WOCE, является частью GODAE и вовлекает более 30 стран и более 4000 автономных буев. В последнее десятилетие в эту работу оперативной океанографии включился флот глайдеров, которые для своего перемещения используют не только термические градиенты морской воды, но и электрическую тягу (Sprey).
Для глайдеров носитель играет принципиально важную роль, так как он должен обеспечить перемещение измерительных модулей как можно дальше и экономичней, т.е. обеспечить максимальную автономность. В реальности тысячи автономных автоматических аппаратов постоянно исследуют Мировой океан.
Перемещение носителя за счет тепловых градиентов поверхностных и придонных водных слоев весьма удобны и эффективны в акваториях теплых экваториальных морей. В качестве рабочего тела используются парафиновые смеси – кристаллических предельных углеводородов в виде твердых растворов. Они бывают условно жидкими Тпл < 27 °С, твердыми Тпл = 28 – 27 °С и микрокристаллическими Тпл > 60 80 °С [5]. При рекристаллизации и плавлении фракций получается изменение объема на 8–10 %. Такой процесс фазовых превращений инерционный и поэтому переходный период особенно в фазе охлаждения требует времени, так как отсутствует усилие движущее аппарат, что также снижает теплообмен.
Конкурентом твердожидкому фазовому механизму является более эффективный газожидкостный фазовый переход низкокипящих жидкостей, таких как жидкие газы, фреоны, хладоны, которых разработано множество для использования в холодильных машинах. Тепловые насосы на основе низкокипящих жидкостей составляют основу холодильной техники и достаточно изучены. Попытки их использования для извлечения энергии из тепловых градиентов океана показали их перспективность [6]. Важно провести сравнительный анализ их термодинамических свойств в тепловых машинах на какой-либо экспериментальной модели теплового насоса. В основе работы такой модели лежит фазовый переход кипения и конденсации рабочего тела. В работе [7] показана цилиндрическая модель тепловой машины переменного объема, которая могла бы быть основой эксперимента. Сопоставление испаряемости различных хладагентов, в основном фреонов [4], приведено на рис. 1, где показано давление насыщенного равновесного пара в зависимости от температуры кипения хладагента в терминах Т °С и давления Р bar.
На этом же рисунке голубым цветом выделен диапазон температурного градиента, характерного для тёплых экваториальных морей. Из рис. 1 видно, что термодинамические параметры значительно отличаются и среди них удобно подобрать максимально подходящие для интересующего диапазона температурного градиента. Очевидно, что максимально для КПД подходит из числа хладонов – R23, но наиболее эффективен сжиженный СО2, имеющий максимальную упругость.
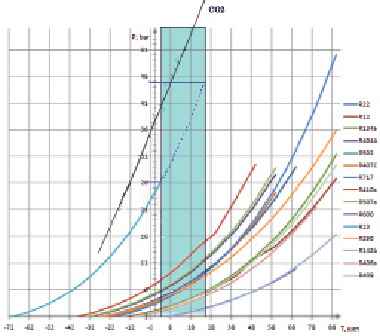
Рис. 1. Зависимость температуры кипения хладогента от давления
На рис. 2 схема возможной конструкции теплового насоса с переменным объемом, здесь 1 – гидроаккумулятор с давлением инертного газа и 2 – эластичная ёмкость с маслом, и соединённой через управляемый клапан 3 с рабочим гидравлическим цилиндром 4 радиусом R, поршнем 5, отделяющим область низкокипящего рабочего тела, которое находится в двухфазном состоянии 6 и 7, где 6 – равновесный насыщенный пар и 7- жидкий хладагент. Поршень выдвигает шток 8 радиусом r через уплотнение 9, который и меняет общий объем – водоизмещение аппарата.
Таким образом, имея в составе аппарата (глайдера) блок управляемого объёма и постоянной массы, появляется возможность управлять движением, например, формировать пилообразную траекторию. Находясь на водной поверхности, где в экваториальных морях температуры могут достигать 25–30 °С, а давление у поверхности Pа,~1 атм, испарение хладагента активное и равновесное давление насыщенного пара достигает значительных величин: 20–30 атм и более.
Зная конкретные термодинамические свойства конкретного хладагента, можно попытаться оценить изменение его плавучести из уровней термодинамики, пренебрегая в первом приближении потерями тепла на нагрев конструкции и теплоотвод в среду.
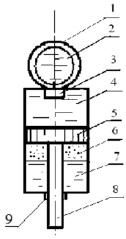
Рис. 2. Схема возможной конструкции теплового насоса с переменным объемом
Для арктических морей, особенно ледовитых, способ использования тепловых градиентов невозможен, а электрические энергоёмкости ограничены. Поэтому в данной работе рассмотрена возможность использования пороховых источников энергии, которые могут рассматриваться как аккумуляторы давления. Они удобны тем, что в промышленном исполнении выпускается большое количество разнообразных боеприпасов в виде холостых патронов (например, патроны для монтажных пистолетов), а также устройств их инициирования и перезарядки (автоматическое оружие). Известно [8], что, сгорая, порох выделяет большое количество горячих газов. Например, для сканирования реального «разреза» – толщи воды глубиной 0,5 км, 1 км и 2 км роботом-зондом с газогенератором на основе бездымного пироксилинового пороха и удельной энергией взрыва q = 1300 кал/г, для изменения водоизмещения на 1 кг (≈1 л) потребуются навески соответственно 0,9 г, 1,8 г и 3,6 г. Поршень, при сгорании этой навески в поршневой камере, совершит перемещение и увеличит водоизмещение на 1000 см3. Однако следует заметить, что не вся выделенная сгоранием энергия идёт на совершение внешней работы. Небольшая часть тепловой энергии 3–5 % остаётся внутренней энергией пороховых газов. Ввиду её малости на практике она не учитывается, хотя из соображений запаса, навески следует взять: 1, 2 и 4 г соответственно. Технически возможно зафиксировать объём поршневой камеры и предотвратить его уменьшение за счёт охлаждения [9]. Каждая глиссада подъёма начинается с инициации порохового патрона и расширения внутреннего объёма камеры сгорания. В результате глайдер получает подъёмную силу равную избыточному водоизмещению, которую преобразует за счёт аэродинамического качества в линейное движение вдоль строительной оси. При достижении заданного верхнего горизонта микропроцессор открывает клапан сброса пороховых газов, а возвратная пружина перемещает поршень в исходное положение. В результате аппарат получает отрицательное водоизмещение и переходит на нисходящую глиссаду.
Для аппаратов типа глайдер, очевидно, следует учитывать в общем балансе энергий также потери на трение вдоль траектории, которые сильно зависят от аэродинамического качества носителя, тогда как для сканирующих вдоль троса зондов это не так важно. Следует заметить, что промышленное использование порохов вызвало значительный рост технологии их изготовления и свойств. Например, такие пороха как «Ирбис-32М» [10] и новые льняные пороха [11], находят все более широкое применение в науке и могут быть использованы в производстве океанологической техники. Для ледовитых морей разработка глайдеров с интерактивной программой движения, использующих пороховой аккумулятор давления, представляется полезной и своевременной задачей технической океанологии.
Из обсуждения вышеприведенных методов энергоснабжения автономных подводных аппаратов можно сделать вывод, что для разных энергосодержащих регионов мирового Океана необходимо разрабатывать свойственные этому региону адаптивные энергосистемы.
В заключение отметим, что для решения численной задачи предсказания климата и погоды необходимо накопить достаточный экспериментальный материал. При этом необходимо учесть тектонику движения литосферных плит, сейсмическую активность (в настоящее время на Земле действуют не менее 5-и активных сейсмических зон – вулканов). Все это – мощные источники атмосферных возмущений на уровне стихийных бедствий, вызывающих землетрясения, цунами, тайфуны, штормы и т.п. бедствия, от «глобального потопа до глобального пожара». Сегодня пока что нет теории, предсказывающей изменения климата и стихийные бедствия. Если человечество перестанет тратить огромные средства на военные самоубийства, а вложит их в науку и технику исследования Океанов, то в ближайшие годы можно надеяться на то, что человечество выживет.
Статья написана в рамках государственного задания ИО РАН (тема № 0149-2018-0011).
Библиографическая ссылка
Комаров В.С. НАПРАВЛЕНИЕ ПЕРСПЕКТИВНОГО РАЗВИТИЯ АДАПТИВНЫХ ЭНЕРГОСИСТЕМ ДЛЯ АВТОНОМНЫХ ПОДВОДНЫХ АППАРАТОВ // Международный журнал прикладных и фундаментальных исследований. 2018. № 12-1. С. 114-119;URL: https://applied-research.ru/en/article/view?id=12532 (дата обращения: 01.07.2026).
DOI: https://doi.org/10.17513/mjpfi.12532