
Scientific journal
International Journal of Applied and fundamental research
ISSN 1996-3955
ИФ РИНЦ = 0,556
MAIN PARAMETERS OF THE BOTTOM AND SUBMARINE OBJECTS INVESTIGATION PROCESS BY SONAR METHODS

Многообразие структур донного рельефа, а также условий, в которых ведутся исследования подводных объектов, в том числе опасных искусственного происхождения и поверхности дна водоемов, требуют внимательно подходить к организации процесса исследований с использованием метода и технических средств гидролокации. Каждый комплекс условий работ требует разработки специальных методик. Решение этих проблем чисто техническими средствами временами менее эффективно, чем разработка специальных научно обоснованных методик. Для эффективного решения задач планирования натурных исследований подводных объектов и дна акватории с использованием гидролокаторов требуется в первую очередь определить основные параметры гидролокационных технологий. Также необходимо проведение типизации основных условий, в которых ведутся исследования морфологии рельефа дна и подводных объектов гидролокационными методами. Также необходима типизация и определение основного содержания характерных задач, которые требуют решения в процессе исследований акваторий и подводных ландшафтов и которые в свою очередь определяют облик гидролокационных технологий. Ключевым является также определение перечня основных объектов исследований, которые ведутся с использованием гидролокационных технологий.
Целью настоящей работы является поиск путей повышения эффективности исследований морфологии рельефа морского дна и подводных объектов гидролокационными методами путем оптимизации структуры и порядка процесса проведения натурных изысканий.
При разработке методов и средств изучения подводных объектов и дна водоемов с помощью гидролокаторов важно уделить внимание планированию маршрута и разработке методологии съемки, а также режимов функционирования оборудования с учетом проблематики исследования.
Планирование исследований морфологии рельефа дна и подводных объектов с использованием гидролокаторов включает ряд элементов, одним из важнейших среди которых является расчет и выбор ориентации галсов, составляющих маршрут исследования. Этот параметр определяется на основе предварительных знаний о рельефе дна в районе работ, а также гидрометеорологических условий, определяющих скорость и направление дрейфа судна в районе. Результаты, полученные в статье [1], дают возможность определить такую ориентацию галсов маршрута исследования, при которой искажения гидролокационных изображений дна и ошибки в определении места положения объектов будут незначительны. Знание параметров дрейфа, с другой стороны, определяет курс судна, на котором оно будет двигаться наиболее стабильно. Из системных соображений надо стремиться к тому, чтобы галсы маршрута были ориентированы в широтном либо меридиональном направлении. Это позволяет оптимально стыковать вновь обследованные полигоны в районе работ. Часто при площадных исследованиях галсы маршрута прокладываются вдоль изобат, что создает более безопасные условия буксировки подводных носителей, минимизирует искажения гидролокационных изображений, повышая их качество и информативность.
Метод гидролокации применим при условии L = (5 – 10)hmin, где L – диапазон дальности гидролокатора бокового обзора, а hmin – отстояние антенны ГБО от дна. Чем меньше L, тем больше частота следования посылок, излучаемых гидролокатором, и тем выше детальность гидролокационных изображений. При этом, однако, уменьшается производительность съемки, поскольку сокращается L и ширина полосы поверхности дна, обозреваемой гидролокатором. Оптимизация режима исследования определяется требуемой детальностью и качеством отчетных материалов.
Другим важным параметром процесса гидролокационных исследований является дистанция между соседними галсами маршрута (МГР) плавсредства, либо буксируемого аппарата – носителя гидролокатора.
Дистанция между соседними галсами является важным параметром для расчетов объемов гидролокационных и батиметрических съемок, а также профилирования мощности донных осадков. При поиске объектов на дне требуется гарантированное перекрытие полос обзора гидролокатора на соседних галсах, что соответствует определенной дистанции между ними и другими параметрами съемки. Геометрическая ситуация изображена на рис. 1. Аналитическое выражение для МГР в соответствии с рисунком приведено на рис. 2 под номером (1), где введены следующие параметры работы гидролокатора: L – диапазон работы ГБО (max наклонная дальность); hmin – расстояние носителя антенн ГБО над дном, db – полоса перекрытия зон обзора гидролокатора на соседних галсах. Очевидно, что полоса перекрытия зон обзора db должна быть больше возможного отклонения в плане носителя антенн ГБО от заданного маршрута. Соотношение (1) для реальных условий преобразуется в соответствии с рис. 2 к виду (2). Соотношение (2) предусматривает 30 % перекрытие зон обзора гидролокатора на соседних галсах. При этом учитывается поправка на наклонную дальность и определяющее соотношение бокового обзора – L = 5hmin. Для диапазона работы гидролокатора в пределах 150–400 м перекрытие зон составляет более 49 м, что попадает в интервал погрешности позиционирования экспедиционных судов и подводных аппаратов на маршруте съемки. При менее точном позиционировании судна на маршруте съемки расстояние между галсами должно быть уменьшено (перекрытие увеличено).
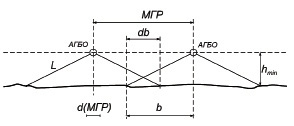
Рис. 1. Схема, поясняющая расчет расстояния между галсами маршрута гидролокационной съемки МГР. На схеме обозначено: АГБО – вид антенны ГБО в вертикальной плоскости, hmin – высота АГБО над грунтом; L – наклонная дальность, b –полоса обзора ГБО с одного борта, db – зона перекрытия полос обзора, d(МГР) – зона отклонения носителя АГБО от намеченного маршрута движения в плане
Междугалсовое расстояние маршрутов промера глубин участков дна вблизи объектов поиска должно соответствовать требуемым масштабам картографических материалов [2, 3], предоставляемым по результатам промера глубин (батиметрическим картам). Минимальное расстояние между галсами промера глубин не должно быть меньше участка дна в зоне покрытия антенной эхолота, диаметр которой определяется соотношением (3) на рис. 2, где α0,707 – полный угол раскрыва диаграммы направленности антенны эхолота, а H – глубина места. Уменьшение МГР менее этого значения эффекта не имеет.
Важной величиной, во многом определяющей технологию гидролокационной съемки при обследовании участков поверхности дна и подводных объектов, является скорость движения носителя ГБО. Скорость движения и частота следования излучаемых гидролокатором импульсов определяет детальность съемки и при определенных соотношениях обеспечивает обследования дна без пропусков, что является ключевым обстоятельством при определении места нахождения подводных объектов, в том числе потенциально опасных.
На рис. 3 вверху приведена схема, поясняющая математическое соотношение, определяющее процесс обследования дна без пропусков в области «ближней зоны» характеристики направленности антенны гидролокатора (зона Френеля).
Ширина «ближней зоны» равна d – ширине антенны, а длина – S = d2/λ, где λ – длина волны звука в воде на частоте работы ГБО. На рис. 3 вверху антенна ГБО перемещается со скоростью V из положения 1 в положение 2 в горизонтальной плоскости на отрезок пути d, равный ее длине, за промежуток времени Т, равный периоду следования излучаемых гидролокатором импульсов (T = 2l/c, где l – рабочий диапазон дальности ГБО, а с – скорость звука в среде). Это предельный случай, когда дно, озвучиваемое в ближней зоне антенны (площадь S×d), перекрывается без пропусков. В этом случае скорость движения антенны или носителя ГБО может быть рассчитана по формуле (4) на рис. 2.
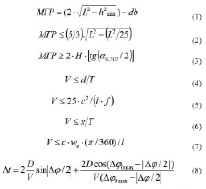
Рис. 2. Формулы, связывающие величины, рассматриваемые в статье
Большинство гидролокаторов бокового обзора имеют антенны длиной d ≈ 50λ [4], что соответствует характеристике направленности с углом раскрыва в горизонтальной плоскости α0,7 = 1 ° на уровне 0,7 [5]. Если выразить длину волны звука через скорость звука и рабочую частоту гидролокатора – (λ = c/f), а период излучения сигналов через выбранный рабочий диапазон – (T = 2l/c), то получаем соотношение (5) для расчета скорости движения, приведенное на рис. 2.

Рис. 3. Схема расчета скорости перемещения антенны гидролокатора, при которой обеспечивается полное покрытие обследуемого дна: вверху – в зоне Френеля антенны, а внизу – в зоне Фраунгофера. На схеме: V – скорость перемещения; 1 и 2 – соответственно положения антенны до и после смещения, d – антенная база, S – длина зоны Френеля антенны; l – выбранный диапазон рабочей дальности ГБО, х – перемещение антенны вдоль маршрута; wо – начало зоны обследования дна без пропусков, w – текущая дальность, α0,7 – угловой раскрыв диаграммы направленности антенны гидролокатора в плане
Кривые зависимости (5) приведены на рис. 4. На рисунке: с – скорость звука в воде (с = 1500 м/c). Значения, попадающие в область ниже соответствующих графиков, удовлетворяют условию (5) – режиму, когда дно обследуется без пропусков в области зоны Френеля антенны ГБО.
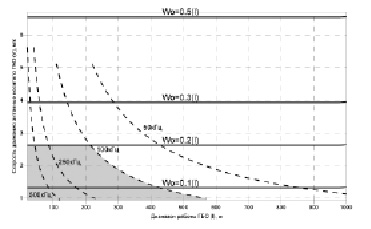
Рис. 4. Кривые зависимости максимальных значений V (ось Y), при которой обследование дна происходит непрерывно без пропусков: сплошные линии – для зоны Фраунгофера антенны ГБО (рис. 2, соотношение (5)) и пунктирные линии для зоны Френеля антенны ГБО (рис. 2, соотношение (7)) с шириной ≈50λ; серый цвет – область величин V, при которой обследование дна будет вестись без пропусков начиная с дистанции wо с помощью ГБО, использующего рабочую частоту 100 кГц и антенну шириной ≈50λ; wо составляет 20 % диапазона дальности
Для области зоны Фраунгофера антенны ГБО в соответствии со схемой на рис. 3 внизу может быть также получено соотношение для условия непрерывного обследования поверхности дна. Антенна гидролокатора на схеме перемещается за время Т в плане из позиции 1 в позицию 2 со скоростью V на расстояние Х. Время Т есть период следования импульсов, излучаемых гидролокатором (T = 2l/c). Предположим, что величине перемещения на расстояние Х соответствует текущая горизонтальная дальность локации w. Дно водоема будет обследоваться непрерывно без пропусков в области перекрытия диаграммой направленности антенны в позициях 1 и 2, то есть для дальностей w ≥ wo. Соотношение (6) на рис. 2 определяет скорость V антенны, которая удовлетворяет условию w ≥ wo.
Для антенн ГБО раскрыв диаграммы направленности на уровне 0,7 спадания по амплитуде в плане составляет α0,7 = 1 ° [4]. В соответствии со схемой в нижней части рис. 3 можно записать соотношение Х = 2wo tg (α0,7/2). Теперь выразим период излучения зондирующих сигналов через рабочий диапазон ГБО – (T = 2l/c). Тогда получим соотношение (7), представленное на рис. 2.
На рис. 4 приведены графики зависимости (7). Величина скорости звука в воде с принята равной 1500 м/c. Значения величин лежащих ниже кривых соответствуют условию (7), при котором дно в зоне Фраунгофера антенны обследуется непрерывно без пропусков на дистанциях w ≥ wo.
На больших глубинах большое значение для обеспечения непрерывного процесса обследования дна имеет точное определение планируемого места спуска за борт судна буксируемого носителя гидролокационной аппаратуры (БН). В идеальном случае место погружения БН должно отстоять от места начала маршрута исследования (как правило, совпадает с границей исследовательского полигона) так, чтобы подойти к нему в состоянии установившегося движения ПН на рабочем горизонте. Величину расстояния от места погружения ПН до границы полигона можно записать в виде соотношения: S = V(T + H/0,85v), где V – скорость плавсредства, Н – глубина места в районе работ, v – скорость лебедки по размотке кабель-троса, Т – время спуска ПН за борт судна.
При проведении погалсовой съемки поверхности дна на больших глубинах с помощью аппаратов и приборов, буксируемых на длинном кабель-тросе, большое внимание следует уделить операции разворота – перехода с одного галса маршрута на соседний встречный. Временной график такого разворота определяется скоростью, курсом и временем движения судна на маршруте разворота. Расчет траектории разворота особенно важен при глубоководных исследованиях и соответственно длинных (10000 м) буксирных линиях. Опытным путем установлено, что эффективным маршрутом разворота является маневр, который начинается резким (на 70–80 °) изменением курса, продолжается циркулицией по окружности до пересечения с обратным соседним галсом и в финале переходит на этот галс [6, 7] (рис. 5).
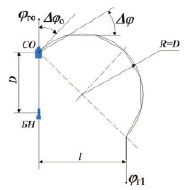
Рис. 5. Схема маршрута перехода судна на обратный соседний галс при глубоководной буксировке БН. На рисунке: Δφ0 – начальное изменение курса судна; Δφ – пошаговый угол изменения курса судна на циркуляции; СО – судно-буксировщик; БН – буксируемый носитель (аппарат); R – радиус основного разворота, D – дистанция между судном и БН в горизонтальной плоскости; l – расстояние между соседними галсами; φго – начальный курс судна; φг1 – курс судна на обратном соседнем галсе
Маршрут перехода на обратный соседний галс представляет собой ломаную линию, вписанную в окружность. Переход от одного участка ломаной к другому соответствует изменению курса на угол Δφ. Параметрами, характеризующими конфигурацию маршрута перехода на обратный галс, являются: Δφ0 – первое радикальное изменение курса судна; Δφ – шаг изменения курса судна на циркуляции; V – скорость плавсредства на основном участке разворота; Δt – время удержания судна на участках ломаной линии. Основным условием, обеспечивающим устойчивость буксирной линии при расчете маршрута перехода с галса на галс, является соотношение R = D, где R – радиус циркуляции, а D – расстояние между судном и БН в горизонтальной плоскости перед началом разворота.
Параметрами для расчета маршрута перехода судна с галса на галс являются: D; l – расстояние между галсами, V0 – рабочая скорость судна на галсе; Δφ0- первое радикальное изменение курса судна, которое ограничивается техническими возможностями буксировочного устройства судна в части максимального угла схода с него буксирного кабель-троса в горизонтальной плоскости.
Изменение курса Δφ при переходе от одного участка ломаной к другому, который определяется условием Δφ = 180 °/n, где n – целое число. Рекомендуемое практикой значение Δφ равно 15º. Курс судна после выполнения первого радикального изменения определяется из соотношения: φ1 = φго ± Δφ0 + Δφ/2, где φго – исходный курс на начальном галсе; Δφ – шаг изменения курса судна на циркуляции (знак «+» соответствует развороту через правый борт, а знак «–» – через левый борт судна); Δφ0 – первое радикальное изменение курса судна. Δφ0 = arccos (l/2D), при этом Δφ0 ≤ Δφ0max. Скорость судна на основном участке маршрута разворота (циркуляции) определяется по формуле V = π D V0 /[D + π (l/2)]. Время удержания судна на постоянном курсе на участках ломаной линии маршрута разворота определяется по формуле Δt = 2(D/V)sin│Δφ/2│.
В случае если при расчете Δφ0 > Δφ0max, то считаем, что Δφ0 = Δφ0max. Тогда справедливо выражение (8) на рис. 2, определяющее время движения судна на последнем прямолинейном участке маршрута разворота.
После окончания движения на последнем участке циркуляции судно переходит на требуемый галс. В течение времени Δt скорость движения судна остается равной V. После этого скорость выравнивают до значения V0 и продолжают работы на галсе.
Таким образом скорость движения на маршруте, междугалсовое расстояние, диапазон дальности, протяженность и конфигурация маршрута движения являются основными параметрами при планировании натурных исследований подводных объектов и дна акватории.
Картирование подводных объектов и рельефа дна по морфологическим признакам, определение конфигурации, структуры, элементов, а также координат подводных объектов и их поиск составляют основное содержание задач типичных исследований акваторий и подводных ландшафтов, которые определяют облик гидролокационных технологий.
Морфология рельефа дна зон гидросферы, таких как морское мелководье (от уреза воды до глубин 20–30 м) шельф, глубоководные впадины, а также реки, озера и водохранилища, определяет параметры гидролокационных технологий, применяемых для ее исследования.
Перечень основных объектов исследований, которые ведутся с использованием гидролокационных технологий, включает подводные объекты техногенного происхождения, такие как подводные потенциально опасные объекты, затопленные суда, подводные коммуникации, подводные части инженерных сооружений, а также природные объекты, к которым относятся навигационные опасности (рифы и мели), осадочный покров дна, береговые линии, формы рельефа дна и их совокупности.
Представленные методические положения внедрены и апробированы в ходе выполнения большого числа прикладных и фундаментальных, в том числе экспедиционных исследований океанского дна, а также в процессе исследований подводных объектов, в том числе потенциально опасных, по контрактам с МЧС России.
Работа выполнена в рамках государственного задания ФАНО России (тема № 0149-2018-0011) при частичной поддержке РФФИ (проект Рго_а № 17-05-41041 и № 18-05-60070).
Библиографическая ссылка
Римский-Корсаков Н.А., Зарецкий А.В., Руссак Ю.С. ОСНОВНЫЕ ПАРАМЕТРЫ ПРОЦЕССА ИССЛЕДОВАНИЙ ДНА АКВАТОРИЙ И ПОДВОДНЫХ ОБЪЕКТОВ ГИДРОЛОКАЦИОННЫМИ МЕТОДАМИ // Международный журнал прикладных и фундаментальных исследований. 2019. № 4. С. 38-43;URL: https://applied-research.ru/en/article/view?id=12694 (дата обращения: 01.07.2026).
DOI: https://doi.org/10.17513/mjpfi.12694