
Scientific journal
International Journal of Applied and fundamental research
ISSN 1996-3955
ИФ РИНЦ = 0,556
BOTTOM RELIEF AND UNDERWATER OBJECTS VISUAL DEEP-WATER OBSERVATIONS TECHNOLOGIES DEVELOPMENT

Разработка глубоководных средств визуальных наблюдений дна океана в Институте океанологии РАН насчитывает почти 70 лет. Так уже в 1960-х гг. были получены первые уникальные подводные снимки дна Марианской впадины. В 1970-х гг. появились образцы систем подводного телевидения, а в 1980-х гг. были созданы глубоководные привязные аппараты, оборудованные высокочувствительными телевизионными системами, стереофотокамерами, а также гидроакустической и магнитометрической аппаратурой.
Целью исследования, представленного в настоящей работе, является анализ опыта создания в Институте океанологии (ИО РАН) глубоководных средств визуальных наблюдений и синтез на его основе инновационных систем для исследования микрорельефа дна, донных животных и растений, а также идентификации и контроля состояния подводных объектов естественного и искусственного происхождения. При этом преследуется цель снизить затраты на построение систем наблюдения за счет использования серийных элементов фото- и светотехники.
Материалом для анализа принципов и подходов к созданию глубоководной техники для визуальных дистанционных наблюдений являются телевизионные и фото- установки БНПА, которые создавались в 1980-х гг. для исследования морфологии микрорельефа дна океана, донной флоры и фауны, а также фрагментов техногенных объектов. В состав фотосистем входили без-затворные фотокамеры, использующие фотопленку чувствительностью 400 ед. ГОСТ, с короткофокусными объективами типа «Гидрорусар». Время экспозиции определялось длительностью вспышки импульсного осветителя. Телевизионные системы создавались на базе высокочувствительных телекамер космических аппаратов, которые совмещались с подводными люминесцентными (таллиевыми) источниками заливающего света. Детальное описание таких систем можно найти в работе [1].
В настоящее время существует интерес к глубоководным системам для ресурсных и поисковых исследований на континентальном склоне и глубоководных участках шельфа, в том числе в морях Российской Арктики и на Черном море [2–4]. Наряду с сейсмоакустическими средствами для таких исследований используются аппараты, оборудованные приборами для визуального дистанционного наблюдения придонной области океана в оптическом диапазоне. Такие системы используют, как правило, оптоволоконные линии связи, позволяющие передавать видеосигнал на большие расстояния в высоком качестве. Методы подводного видеонаблюдения также широко используются для изучения донных животных и растений. Применение видеоаппаратуры позволяет оперативно получить информацию о характере дна, определить видовой состав донного сообщества, а также произвести качественный и количественный учет отдельных организмов, дополняя траловые исследования и сохраняя при этом целостность учитываемых сообществ. Разрешающая способность видеоаппаратуры Full HD является достаточной для проведения исследований сообществ мегабентоса (размер более 5 см). Однако этого разрешения не хватает для изучения макробентоса (0,5–5 см). С другой стороны, при исследованиях макробентоса нет необходимости в получении непрерывного видеоизображения, так как для изучения пространственного распределения организмов и проведения их учета достаточно иметь ряд дискретных изображений в различных точках исследуемого района. Для этой цели широко применяется фотосъемка дна с использованием импульсных источников света на маршрутах, прокладываемых, как правило, вдоль или поперек изобат. Такие фоторазрезы позволяют изучать микрораспределение представителей донной фауны в зависимости от характера рельефа дна, производить учет животных, не попадающих в пробу трала или дночерпателя, а также вести более точный учет прикрепленных организмов.
Исследование метода и аппаратуры для придонных наблюдений с помощью фоторазрезов проводилось на платформе БНПА «Видеомодуль», созданного в Институте океанологии [5–7] на основе результатов анализа опыта предыдущих разработок БНПА. БНПА «Видеомодуль» представляет собой пространственную раму из нержавеющей стали, внутри которой на кронштейнах закреплены прочные корпуса с электронным оборудованием, элементами питания, светильниками и видеокамерами, ГБО, альтиметром и глубомером. Корпуса соединены между собой подводными кабелями с герметичными электрическими разъемами. Рама имеет узел регулируемой подвески к кабель-тросу и 12 грузов для его устойчивого заглубления и балансировки по дифференту. Фотография аппарата приведена на рис. 1, основные технические характеристики – в таблице.
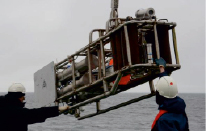
Рис. 1. БНПА «Видеомодуль» во время спуска под воду с борта НИС «Академик Мстислав Келдыш» в Карском море в июле 2019 г.: слева в корме БНПА – цилиндрические прочные корпуса для электронных блоков и источников электропитания, справа вверху – перспективная видеокамера, справа внизу обзорная аналоговая камера
Основные технические характеристики БНПА «Видеомодуль»
|
№ п/п |
Характеристика |
Значение |
|
1 |
Масса, кг |
550 |
|
2 |
Габариты, м |
2,1×1,0×0,7 |
|
3 |
Максимальная рабочая глубина, м |
6000 |
|
4 |
Тип буксирной линии |
Кабель-трос КГ1х3Е-70-60-3 |
|
5 |
Информационный канал связи |
Оптическое волокно (3 шт.) |
|
6 |
Информационный интерфейс |
RS232 |
|
7 |
Энергосистема |
Бортовая аккумуляторная батарея (Pb) |
|
8 |
Напряжение/емкость батареи В/Ачас |
12/50 |
|
9 |
Минимальная автономность, час |
2 |
|
10 |
Телекамера 1 |
Цв. цифровая IP HD BeWard BD3270Z |
|
11 |
Телекамера 2 |
Цв. аналоговая Pal EC-007A |
|
12 |
Телекамера 3 |
Цв. аналоговая Pal EC-007A |
|
13 |
Источник заливающего света (ИЗС) |
Светодиодная матрица Epistar XY-J45 |
|
14 |
Максимальная электрическая мощность ИЗС, Вт |
180 = (30*6 шт.) |
|
15 |
CTD-зонд |
SBE 19plus |
|
16 |
Датчик давления глубомера |
MLH 08KPSB01A Honeywell |
|
17 |
Альтиметр (эхолот) |
На базе Mark-4 фирмы Lawrence Inc. |
|
18 |
Система оптического масштабирования |
М65051 US-Lasers |
Начиная с 2015 г. для информационной и механической связи с БНПА применяется кабель-трос КГ1х3Е-70-60-3, с тремя волоконно-оптическими линиями связи. Он был разработан и изготовлен специально для БНПА «Видеомодуль» на предприятии «Псковгеокабель» и отличается от аналогов наличием двух резервных оптоволоконных линий и меньшим диаметром при той же прочности, что позволяет намотать на лебедку трос большей длины. Использование оптического волокна обеспечивает абсолютную защищенность линии связи от электромагнитных, электростатических помех и атмосферного электричества. В прочных корпусах БНПА размещено следующее оборудование:
– система управления, навигации и передачи данных;
– аккумуляторы и вторичные источники питания системы автономного энергопитания;
– обзорная видеокамера и видеокамера высокого разрешения, с трансфокатором;
– видеокамера, служащая для управления БНПА; эта камера направлена вперед и позволяет получать видеоизображение препятствий впереди по ходу движения БНПА;
– гидролокатор бокового обзора с рабочей частотой 240 кГц;
– глубиномер, альтиметр и указатели масштаба;
– шесть источников заливающего света со светодиодными матрицами.
Для изучения макробентоса методом маршрутной фотосъемки БНПА «Видеомодуль» был дополнительно оснащен фотосистемой на базе фотокамеры высокого разрешения SONY ILCE 7RM2, позволяющей получать изображения разрешением 7952 на 5304 пикселя, а также импульсным осветителем на основе источника освещения Godox AD200 мощностью 200 Вт. Источник света закрыт прочным стеклоколпаком, имеющим внешний параболический рефлектор с зеркальным покрытием для формирования направленного освещения места съемки. Электронный и программный интерфейс камеры совмещен с интерфейсом системы телеуправления БНПА, что позволяет дистанционно управлять параметрами фотосъемки (светочувствительностью, значениями диафрагмы и выдержки) и ее режимом: задавать временной интервал между отдельными снимками, либо производить съемку вручную в требуемый момент времени. Фотоизображения передаются по волоконно-оптической линии связи и автоматически загружаются на жесткий диск судовой ЭВМ комплекса БНПА. На рис. 2 приведена функциональная схема фотосистемы. Оптическая и электронная аппаратура подводной фотокамеры и импульсного осветителя заключена в соответствующие прочные герметичные корпуса.
Корпуса соединены между собой подводным кабелем с герметичными разъемами, по которым от камеры подается сигнал на срабатывание фотовспышки, а также транзитом подводится бортовое электропитание =12В, которое преобразуется блоком питания (БП) импульсного осветителя до номинала =14,5В. Аппаратура подводной фотокамеры в прочном корпусе включает собственно камеру SONYa7r, два интерфейса связи и блок питания, который преобразует бортовое электропитание =12В к номиналу =5В для питания камеры. Первый интерфейс связи преобразует выходные данные (изображения), получаемые с помощью камеры из формата HDMI в формат PAL для передачи с помощью системы телеметрии в судовую часть комплекса БНПА. Второй интерфейс связи позволяет передать команды управления, в том числе синхросигналы, которые поступают на вход фотокамеры через систему телеуправления из судовой части БНПА. Через систему телеуправления БНПА может быть изменен режим работы фотокамеры, в частности включен режим «авто», при котором камера срабатывает автоматически через заданный заранее интервал времени и запускает фотовспышку.
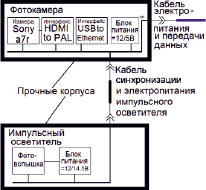
Рис. 2. Функциональная схема подводной фотосистемы высокого разрешения БНПА «Видеомодуль»
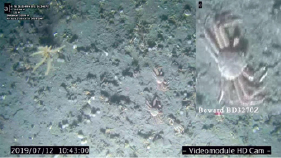
Рис. 3. Кадр видеозаписи, полученной с помощью HD видеокамеры Beward BD3270Z БНПА «Видеомодуль». В левом верхнем углу увеличенный фрагмент видеоизображения

Рис. 4. Кадр видеозаписи, полученной с помощью фотосистемы БНПА «Видеомодуль» на базе цифрового фотоаппарата SONY ILCE7RM2. В правом верхнем углу увеличенный фрагмент видеоизображения
Испытания и экспериментальные исследования с использованием фотосистем, установленной на борту БНПА «Видеомодуль», были проведены в экспедиции 76 рейса НИС «Академик Мстислав Келдыш» в Карское море на континентальном склоне и в Новоземельской впадине Карского моря на глубинах до 400 м. Исследовалась популяция животных вселенцев – краба-стригуна опилио (Chionoecetes opilio) [8, 9]. На рис. 3 приведен кадр видеозаписи, полученной в экспедиции в процессе маршрутной видеосъемки на континентальном склоне в Карском море.
На рис. 4 приведен фотоснимок того же участка дна, сделанный с помощью фотосистемы БНПА. В углах видеокадра и фотоснимка приведены их увеличенные фрагменты с изображениями животных. Хорошо видно, что фотоизображение, в отличие от видео, можно существенно масштабировать без потери качества. Таким образом экспериментально доказано преимущество фотосъемки при изучении морфологии донных животных.
Анализ энергетической эффективности показал, что функционирование БНПА в режиме фоторазреза значительно выгоднее маршрутной видеосъемки. Импульсный источник света мощностью 200 Вт обеспечивает освещенность эквивалентную освещенности, создаваемой шестью источниками заливающего света (ИЗС) мощностью по 30 Вт. При длительности импульса вспышки 1/200 с и интервале фотографирования 10 с средняя мощность импульсного источника света составляет около 0,1 Вт. Надо отметить, что для корректной работы системы автоматической фокусировки фотокамеры необходима минимальная постоянная освещенность объекта съемки (поверхности дна). Для создания такой освещенности, как показали натурные испытания фотосистемы, достаточно одного ИЗС мощностью 30 Вт. Таким образом, при съемке в режиме фоторазреза требуемая освещенность может быть создана в шесть раз меньшими затратами энергии, нежели при видеосъемке. Это особенно важно при использовании автономного электропитания БНПА от бортовой аккумуляторной батареи.
Выводы
Выполненные экспериментальные исследования показали эффективность использования метода подводного фотографирования наряду с маршрутной видеосъемкой, в первую очередь в части разрешающей способности, для визуальных наблюдений и исследований подводных объектов, как-то: форм микрорельефа, донных животных, растений и техногенных фрагментов. Показано, что помимо разрешающей способности применение фотосъемки позволяет сократить электропотребление бортовой аппаратуры БНПА.
Работа выполнена в рамках государственного задания ФАНО России (тема № 0149-2018-0011) при частичной поддержке РФФИ (проект Арктика № 18-05-60070 и Рго_а №17-05-41041).
Авторы выражают признательность Я.И. Белевитневу, С.В. Жаворонкову и А.А. Пронину за помощь в подготовке экспериментальных исследований.
Библиографическая ссылка
Анисимов И.М., Римский-Корсаков Н.А., Тронза С.Н. РАЗВИТИЕ ГЛУБОКОВОДНЫХ ТЕХНОЛОГИЙ ВИЗУАЛЬНЫХ НАБЛЮДЕНИЙ РЕЛЬЕФА ДНА И ПОДВОДНЫХ ОБЪЕКТОВ // Международный журнал прикладных и фундаментальных исследований. 2019. № 10-1. С. 149-153;URL: https://applied-research.ru/en/article/view?id=12883 (дата обращения: 01.07.2026).
DOI: https://doi.org/10.17513/mjpfi.12883