
Scientific journal
International Journal of Applied and fundamental research
ISSN 1996-3955
ИФ РИНЦ = 0,556
HYBRID RADIO-CONTROLLED COMPLEX FOR REMOTE UNDERWATER MONITORING IN REAL TIME

Стремительное развитие морской газо- и нефтедобычи, строительства и эксплуатации плотин ГЭС, водных магистралей АЭС и многих других индустриальных подводных объектов, возрастает необходимость их постоянного мониторинга, прежде всего гидроакустическими и телевизионными методами. Рыночным ответом на эти вызовы стало появление и развитие ТНПА – телеуправляемых необитаемых подводных аппаратов типа ROV (remotely operated vehicle) различных классов, предназначенных для дистанционного выполнения подобных работ с судна или берега [1]. Обязательными условиями для использования ТНПА являются: наличие судна обеспечения; экипажа, (даже для малогабаритного аппарата часто необходимо 2–3 человека) в месте проведения работ; необходимость доставки ТНПА и экипажа к месту работ и обратно; предварительное обследование акватории гидролокационными средствами для поиска и определения местоположения исследуемых объектов (в большинстве случаев). Несмотря на то, что использование ТНПА существенно дешевле, чем водолазные методы, их применение требует немалых расходов на проведение работ, включая использование специально оборудованных судов.
Вместе с тем стремительно развиваются безэкипажные автономные радиоуправляемые надводные суда (БАРС) – катера, лодки, катамараны, способные выполнять мониторинг состояния акваторий, обследование дна с помощью гидролокации на значительном удалении от оператора, в пределах радиовидимости. В случае обнаружения разного рода объектов, в том числе и потенциально опасных, для их допоиска, осмотра и идентификации требуется использование ТНПА. Отбор проб грунта, постановка донных станций или другого оборудования, осмотры днищ и бортов судов, экологический мониторинг также требует проведения работ с помощью ТНПА [2].
Цель данной работы заключается в исследовании и создании технологии удаленной работы подводной техники и измерительной аппаратуры через интернет, включая использования новейших сетей на базе 5G и технологию «Интернет вещей» (IoT). В проекте решается задача симбиоза разных технологий, а именно глобальных телекоммуникаций и дистанционно управляемой подводной техники. Растущий охват территории Земли широкополосными высокоскоростными телекоммуникационными сетями на базе новейшей технологии 5G позволит получать данные и управлять различными видами подводной техники в том числе на недоступных до настоящего времени территориях и акваториях.
Рассматривается проект интегрированной платформы, которая обеспечит дистанционный поиск и мониторинг подводных объектов с помощью ТНПА. Её реализация позволяет во многих случаях заменить использование квалифицированных операторов на месте работ. А также судов с экипажами. Работы смогут проводиться удаленно с помощью системы БАРС-ТНПА и телекоммуникационных сетей. Это значительно снизит затраты и расширит акватории для контроля среды.
Использование технологии IoT (Интернет вещей) позволит повысить эффективность сбора оперативных данных о состоянии акваторий, создать новые средства для экологического мониторинга и контроля загрязнения акваторий.
Гибридный поисково-осмотровый комплекс (рис. 1) состоит из надводной и подводной частей. Надводная часть представляет собой мобильную станцию, базирующуюся на удаленном объекте, как стационарном (например, морская платформа или заякоренный буй), так и мобильном (БАРС, передвижные платформы, т.п.). С помощью кабель-троса она соединена с подводной частью комплекса – погружным (буксируемым или закрепленном на бортах) гидролокатором бокового обзора и ТНПА. [3] Также она оснащена радиоканалом для телекоммуникации с береговой или судовой станцией (пультом управления). Гидролокация и управление ТНПА осуществляется пилотом-оператором дистанционно c пульта управления по радиоканалу (возможно по беспроводным сетям Wi-fi, 4/5G, LTE и др.). Кроме того, в проекте будет разработана система управления комплексом, включая пульт оператора.
Принцип работы комплекса. Станция (3) принимает по радиоканалу (4,5) команды от удаленного оператора и транслирует их по кабелю на ТНПА. Осуществляется спуск и погружение ТНПА (2). Для этого дается команда «ход вперед» и ТНПА начинает двигаться, при этом он вытягивает кабель с барабана катушки. Следует отметить, что плавсредство должно удерживаться на месте, используя GPS. Оператор управляет движением ТНПА, а также БАРС, получая на мониторах (6) видео и данные в режиме реального времени. При этом он может находиться как на расстоянии до нескольких километров от места проведения мониторинга (в случае управления непосредственно по радиоканалу), так и в удаленном режиме (при использовании Ethernet/Интернет).
Технические характеристики ТПА:
– рабочая глубина: до 300 м;
– скорость:
– горизонтального движения – до 3 узлов;
– вертикального движения – до 1 узла;
– лагового движения – до 0,5 узла;
– режим автоматической стабилизации по глубине и курсу;
– вес подводного модуля в воздухе (не более) – 25 кг;
– размеры подводного модуля – 550x450x350 мм.
Технические характеристики электрической лебедки, оснащенной кабелеукладчиком:
длина кабеля – до 300 м.
Технические характеристики удаленного блока управления:
– питание – 220В 50Гц;
– мощность (не более) – 3 кВт;
– радиус действия радиопередатчика (не менее) – 1 км.
Технические характеристики блока управления оператора:
– питание – 220В 50Гц;
– мощность (не более) – 1 кВт;
– радиус действия радиопередатчика (не менее) – 1 км.
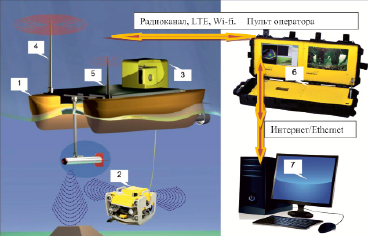
Рис. 1. Состав и конфигурация гибридного радиоуправляемого поисково-осмотрового комплекса: 1 – автономное плавсредство (например, безэкипажный катамаран или катер); 2 – ТНПА с кабелем-связкой (при движении ТНПА кабель сматывается с бортовой катушки). Будет использован серийный ТНПА ГНОМ; 3 – бортовая станция управления и питания ТНПА через кабель-связку («шлюз» или «мост»; 4, 5 – радиоканалы управления удаленным объектом и станцией (могут быть совмещены); 6 – пульт оператора (первый вариант в брызгозащитном контейнере для установки на плавсредство, планируется использовать в режиме прямого управления оператором по радиоканалу оператором с берега или судна обеспечения), второй вариант – для режима сетевой работы (компьютер – сервер) без мониторов, электроника и компьютер размещены в водозащитном контейнере станции (3); 7 – компьютер «Клиент» для управления станцией по сети Ethernet/Интернет

Рис. 2. ТПА ГНОМ ПРО. Вариант двухмониторной станции управления
Для создания комплекса будет существенно переработан ТНПА СуперГНОМ PRO (рис. 2), в том числе изменена конструкция, в ряде случаев используются новые материалы, более современные электронные модули, программное обеспечение [4]. Комплекс будет выполнен в двух вариантах – в контейнере без мониторов (3) для размещения на плавсредстве, также и в существующем исполнении для работы с судна или берега.
Для реализации проекта необходимо:
– существенно модернизировать систему управления ТНПА;
– разработать телеуправляемую кабельную лебедку;
– реализовать радиоканал управления удаленной станцией;
– обеспечить функционирование станции в режиме удаленного использования, в том числе герметичность, помехозащищенность и пр.
Должна быть предусмотрена возможность как питания станции от собственного источника, так и подключения к источнику питания удаленного объекта [5].
Планируется разработать новый пульт оператора, который должен обеспечить прием данных по радиоканалу со станции (телеметрия, видео, датчики), передачу команд управления на ТНПА. Также должно быть реализовано подключение пульта оператора к сети Интернет и разработано программное обеспечение и интерфейс управления станцией через сеть Интернет.
Реализация технологии удаленного управления позволит использовать в гибридных комплексах другие модели серии ГНОМ – Стандарт, Супер (рис. 3), которые имеют меньшие массо-габаритные параметры, при этом потребляют значительно меньше мощности (200–500 Вт).

Рис. 3. ТПА СуперГНОМ
Это позволит расширить сферу применений комплекса. В частности, он может быть размещен на удаленных объектах с ограниченным энергопотреблением или мобильных платформах меньших размеров [6].
Заключение
В аппаратах ГНОМ использован научный задел и многолетний опыт проектирования и эксплуатации подводной техники. Они имеют хорошо просчитанную гидродинамику, высокий кпд движителей за счет эффективного гребного винта и магнитной муфты, тонкий (2–3 мм в диаметре) коаксиальный кабель нейтральной плавучести (он был специально сконструирован под ГНОМ для минимизации потерь мощности без увеличения толщины).
Аппараты «ГНОМ» имеют важные конкурентные преимущества, в числе которых:
– специально разработанная система телекоммуникации и упомянутый тонкий кабель (в 2–3 раза тоньше, чем у конкурентных аналогов), которые позволяют существенно улучшить управляемость аппаратов, особенно на глубине, и ощутимо уменьшить как весогабариты системы, так и энергопотребление;
– оригинальная магнитная муфта в конструкции, минимизирующая потери мощности двигателя и увеличивающая его ресурс;
– скорость, сопоставимая с зарубежными аналогами, достигаемая при меньшей (в 2–4 раза) потребляемой мощности;
– малые весогабариты, позволяющие разместить всю систему в двух переносных чемоданах-дипломатах, включая батарею электропитания (аналогов на рынке нет).
Ряд проведенных экспериментов показал возможность управления ГНОМами по компьютерным сетям, что весьма актуально, например, для:
– дистанционного мониторинга бассейнов выдержки отработанного топлива АЭС;
– инспекций опор нефтяных платформ;
– ряда гидротехнических сооружений и др. мест, где есть компьютерные сети.
Изготовлен прототип системы. Протестирован канал управления по компьютерным сетям, показавший реальность идеи по управлению через интернет.
Разрабатываемый комплекс позволит значительно расширить сферу применения телеуправляемых подводных аппаратов, повысить эффективность сбора оперативных данных об обстановке в Мировом океане, создать новые средства для экологического мониторинга и определения загрязнения акваторий.
Статья написана в рамках государственного задания ИО РАН по теме № 0149-2019-0012.
Библиографическая ссылка
Розман Б.Я., Елкин А.В. ГИБРИДНЫЙ РАДИОУПРАВЛЯЕМЫЙ КОМПЛЕКС ДЛЯ ДИСТАНЦИОННОГО ПОДВОДНОГО МОНИТОРИНГА В РЕЖИМЕ РЕАЛЬНОГО ВРЕМЕНИ // Международный журнал прикладных и фундаментальных исследований. 2019. № 10-1. С. 175-178;URL: https://applied-research.ru/en/article/view?id=12888 (дата обращения: 01.07.2026).
DOI: https://doi.org/10.17513/mjpfi.12888