
Scientific journal
International Journal of Applied and fundamental research
ISSN 1996-3955
ИФ РИНЦ = 0,556
THE USE OF THE LAW OF GRAVITATION TO RELEASE ENERGY FROM AQUATIC ENVIRONMENT WITH THE PURPOSE OF PROVIDING OCEANOLOGICAL MEASUREMENTS

Среди законов «мироздания», видимо, самый древний это закон гравитации. Он же занимает и центральное место в изучении мира. На этот закон, можно сказать, «нанизано» само мироздание. Человек, зародившийся у воды и эволюционировавший на водных берегах ничего не знал о гравитации, о законе Архимеда (III в. до н.э.) силе тяжести, хотя повседневно ощущал их присутствие. Но настало время, и человек стал строить лодки и корабли, и тогда ему по крупице пришлось осознавать суть мироздания. К примеру, бедный Галилео Галилей, изобретатель телескопа и открыватель гелиоцентричности мира (1609 г.), был осужден и лишен права изобретать. Это с большим трудом стало проясняться только тогда, когда Ньютон (в 1667 г.) открыл и сформулировал законы всемирного тяготения. И создал для исчислений интегрально-дифференциальный математический аппарат. Тогда стало возможным попытаться понять, что же такое сила гравитационного взаимодействия тел и сила, удерживающая планеты на орбитах их движения. Стала вычислимой для любых форм удерживающая предметы на плаву сила Архимеда (а прошло между открытиями Архимеда и Ньютона более 25 веков).
С появлением судов и морских перевозок, а также военных флотов возникла необходимость в определении грузоподъемности судов и балансировке грузов при их размещении и т.п. Архимедова сила приобрела исключительно важную роль, так как она связывала ощутимый вес тела с объемом вытесненной воды. Исходно это чисто гидромеханическое понятие. Однако эта сила определяет не только грузоподъемность судов, но и основы всего судостроения и безопасность судоходства.
Занимаясь технической океанологией, в частности разработкой подводных аппаратов – инструментов для подводных исследований в целях различных измерений в водной среде как автономных, так и телеуправляемых, приходится сталкиваться со всеми задачами, связанными с весом измерительных устройств, их водоизмещением, комбинировать конструкции с необходимыми управляемыми гидростатическими функциями. Так как сила веса и противоположная ей сила водоизмещения (архимедова сила) имеют одну и ту же природу, а именно, архимедова сила – это сила водоизмещения, которая является поверхностным интегралом гидростатического давления по площади поверхности вытесняемого объем. Использование гравитационной энергии при поиске оптимальных решений и формулировании выбора способа решения и является целью, поставленной при проектировании подводного аппарата.
Со временем людям понадобилось исследовать подводный мир в придонных акваториях, для чего были разработаны и созданы плавающие самоходные подводные аппараты, которые было необходимо дистанционно перемещать по заданным траекториям, управляя курсом, креном, дифферентом. Важнейшим проектируемым качеством самоходных управляемых подводных аппаратов, как и любых видов транспорта, является их управляемость, т.е. способность средств управления изменять траекторию движения, согласно заданной программе или адаптивно отслеживать рельеф грунта, двигаясь эквидистантно над ним.
В научном океанологическом пространстве разработано множество методов и отвечающих им целевых аппаратов для подводных измерений гидрологических, гидрохимических и гидрофизических параметров. Соответствующие аппараты должны отвечать сложным навигационным требованиям, включая определение координат объекта в подводном и надводном пространстве, делятся, как правило, на подводные и надводные, а по характеру функционирования на вертикально сканирующие буи разрезов, дрейфующие и сканирующие в дрейфе, которые производят измерения в толще воды – буйковые станции и теле- управляемые подводные аппараты, снабжённые океанологической и навигационной измерительной аппаратурой (Apeks, Prover) [1]. Эти аппараты способны управлять горизонтом дрейфа, зависать и выполнять исследования. Большой интерес и будущее, видимо, ждёт аппараты типа «Подводный торпедообразный глайдер» «с гидродинамическими принципами движения», использующий смешанные источники энергообеспечения [2].
Эффективность подводных аппаратов в большой степени зависит от их управляемости. Известные способы управления сводятся, как правило, к силовому воздействию рулевыми движителями или используют реактивную силу обтекающего потока. Наиболее интересен метод разделения управляющей конструкции, выраженный в способе обеспечения управляемости подводного аппарата [3], включающий разделение конструкции аппарата на две сборки: одну из них строительную, фиксированную относительно вектора упора двигателей и связанной системы координат – главных строительных осей аппарата, и вторую – управляющую креном, дифферентом, уравновешенные с собственным весом в воде блоками технологической плавучести, совмещая в строительной сборке центр тяжести и центр величины (она имеет нулевую плавучесть, а управляющей дифферентом создают максимальный метацентр, оставляя с нейтральной плавучестью в воде).
Такая конструкция может быть принципиально представлена в следующем виде – на рис. 1, где приведена схема компоновки подводного аппарата. Здесь Фиг. А – аппарат в сборке из двух нейтральной плавучести компонующих сборок, Фиг. Б – управляющая сборка нейтральной плавучести с максимальным метацентрическим моментом, Фиг. Г – сборка с минимальным (нулевым) метацентрическим моментом, так же нейтральной плавучести, Фиг. Д – вид взаимодействия сборок в процессе управления дифферентом, Фиг. В – вид поперечного разреза аппарата. Такая компоновка позволяет вращать вокруг общей оси О-О сборку 1 и сборку 2, как показано на Фиг. Д, не смещая общий центр масс аппарата.
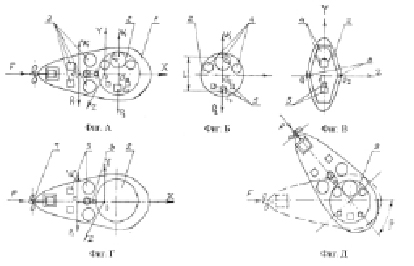
Рис. 1. Цифровые обозначения 1–8 – элементы внутренней конструкции, буквенные обозначения указывают на оси координат и строительные оси аппарата, а также на вес и объем
Такой способ проектирования пригоден для автономных аппаратов, так как вариант кабельной связи резко ухудшает управляемость аппарата за счет гидравлического воздействия кабеля. Рассмотренные аппараты способны работать дистанционно на дальних границах шельфа или в окрестностях судна-обеспечения. Поэтому, как правило, шельфовые аппараты являются привязными телеуправляемыми и не испытывают проблем с энергопитанием.
Разумеется, для привязных аппаратов важной является ориентация главных строительных осей аппарата с тем, чтобы метацентр и центр тяжести находились постоянно на одной вертикали, т.е. силы тяжести и метацентрическая высота образовывали стабилизирующую пару сил, что позволяет адекватно позиционировать подводный аппарат. Это значительно упрощает требования к технике управления. Известно, что смысл привязного телеуправляемого аппарата в том, чтобы находиться как можно ближе к исследуемому объекту, другими словами, иметь визуальный контакт с объектом исследования. Для этого необходимо иметь остойчивость, т.е. иметь максимальное расстояние между центром величины и центром тяжести. В классе привязных аппаратов роль гравитации, точнее силы тяжести, сводится к формированию вертикальной ориентации равнодействующей всех массовых сил, составляющих конструкцию. Это и есть задача и метод остойчивости. Со времен, когда великий изобретатель-ученый Архимед сформулировал свой закон, и до Ньютона, люди пользовались им 4,5 века, не особо задумываясь, почему это так, а не иначе. И только великий Ньютон объяснил с позиции физики и математики, что такое закон Архимеда, введя понятие (определение) силы.
Кроме весьма распространенных привязных – телеуправляемых аппаратов, существует огромный методологический класс аппаратов сканирующих океанскую толщу и диагностирующих состояние водной массы на разных горизонтах и аппаратов, измеряющих гидрологические, гидрохимические свойства воды в конкретной точке акватории во времени. Этот класс аппаратов представляет собой буйковые станции. Они, как правило, вынуждены иметь собственные приборные запасы энергии. Весьма заманчивым является использование гравитационной энергии для перемещения по вертикали, особенно на большие глубины. Поэтому изыскание возможностей использования природных источников энергии, весьма желательно. Учитывая, что наш мир переполнен гравитационной энергией и люди, в меру своего понимания, всю жизнь пытались её использовать и использовали сначала в водяных мельницах, а затем в гигантских гидроэлектростанциях, да и ветровая электроэнергетика имеет ту же природу. Известны примеры использования этой энергии и в океанологии: – глайдеры (например, модель SLOCUM, авторы Генри Стоммель и Doug Webb и др.) [4] Авторы аппарата используют способ управления водоизмещением аппарата, содержащего термочувствительный элемент на основе парафина – теплоёмкости его фазовых переходов (рекристаллизации), который при нагревании увеличивает объем. В результате, изменяется водоизмещение глайдера. Таким образом, аппарат может погружаться, нагреваясь в поверхностных слоях акватории до температуры окружающей воды. Погружаясь, аппарат охлаждается и изменяет свой совокупный удельный вес и всплывает на поверхность, где, нагреваясь, увеличивает свой удельный вес и снова погружается. Самое интересное в нем то, что для совершения этой работы используется гравитационная энергия Земли. Практически, аппарат может работать бесконечно.
Аналогичный предыдущему [4] принцип заложен в «Способ передвижения по вертикали подводного аппарата, использующий управление объемом переменного водоизмещения» с помощью низкокипящей жидкости [5]. Гравитационная энергия тела, помещенного в жидкость, определяется не только его массой или его сухим весом, но и силой Архимеда, которая определяет его водоизмещение. Управлять плавучестью тела можно либо изменяя его массу, либо изменяя его водоизмещение. Поскольку изменение массы практически невозможно, так как означает просто ее потерю, то единственное это – изменять водоизмещение, хотя часть гидравлической энергии рассеивается в окружающую водную среду, в которой движется аппарат – тело переменного объёма. Способ отличается ещё и тем, что рассеянная энергия может быть частично реинтегрирована вторичным преобразователем (например, через импеллер в зоне обтекания). В действительности, это аналогично изменению совокупного удельного веса всего аппарата.
Способ реализуется, как показано на рис. 2. Здесь вариант схематичной конструкции подводного аппарата управляемого водоизмещения, где 1 – это прочный цилиндрический корпус аппарата, в котором может двигаться шток-поршень 2 (водоизмещающие подвижные части подводного аппарата) и давить на жидкость 3 – (технологическое масло), «передавливая» его в эластичный упруго-деформируемый резервуар 4 через управляемый клапан разгрузки 5. В полость между стенкой корпуса 1 и шток-поршнем 2 помещена низкокипящая жидкость 6, в которой смонтирован электронагреватель 7, подключенный кабелем 8 к солнечным батареям 9, обращенным к солнцу, когда аппарат достигает поверхности. Электроэнергия, получаемая от батарей, нагревает низкокипящую жидкость до кипения, производя равновесный парогаз 10, давление которого соответствует температуре кипения. Это давление через управляемый клапан разгрузки 5 перемещает шток-поршень вверх, выдавливая масло 3 через управляемый клапан разгрузки 5 в эластичный резервуар 4, с наружной стороны которого находится рабочий газ 11, аккумулирующий давление, начальное (заправочное) давление которого соответствует горизонту погружения. При этом шток-поршень 2 втягивается в прочный цилиндр 1.
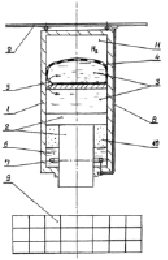
Рис. 2. Вариант схемы способа управления водоизмещением с помощью изменения объема жидкости, подогреваемой за счет солнечной энергии
В результате общий водоизмещающий объем аппарата уменьшается и он начинает погружаться, при этом клапан 5 закрывают, а шток-поршень фиксируют в верхнем положении. Следует заметить, что низкокипящая жидкость 6 входит в номенклатуру промышленных хладагентов [6], довольно большого числа фреонов и других низкокипящих жидкостей, включая сжиженные газы, в том числе СО2, насыщенный пар которого обладает довольно высокой упругостью.
Проектная плавучесть аппарата рассчитана так, что если шток-поршень полностью «втянут» в цилиндр, то аппарат имеет отрицательную плавучесть, а при полностью «выдвинутом» – положительную плавучесть. При достижении заданного горизонта освобождают шток-поршень и открывают клапан 5, тогда аккумулирующий рабочий газ 11, сжатый давлением парогаза в процессе его образования, начнет перемещать своим давлением масло 3 в полость поршня, перемещая при этом шток-поршень наружу, увеличивая водоизмещение аппарата, и он начнет всплывать. Поднявшись до поверхности моря, солнечные батареи снова начнут вырабатывать электричество и включат нагреватели низкокипящей жидкости. Процесс будет повторяться неограниченное число циклов, пока имеется солнечный свет. Весь процесс управляется микроконтроллером, выполняющим измерения, для которых предназначен аппарат, регистрирует их в памяти или передает через ГЛОНАС.
Выводы
Таким образом, показана возможность использования гравитационной энергии с помощью природной возможности низкокипящих жидкостей.
Способ может быть реализован и другим устройством [7], близким к показанному на рис. 3 или иным, сохраняющим энергетическую функциональность и принцип управления водоизмещением, как в [5]. Здесь гравитационная энергия аккумулируется в энергию упругой деформации, которая возвращается в следующей фазе в движение аппарата. Аккумулятор упругости может быть изготовлен на основе качественной стальной пружины, подпирающей шток-поршень. Низкокипящую жидкость 2 помещают во внутреннюю полость между шток-поршнем 3 и стенкой прочного цилиндра 1 и нагревают электронагревателями 4, которые расположены во внутреннем объеме низкокипящей жидкости, от солнечных [8] батарей 5, которые размещаются на верхней панели аппарата, что они раскрываются на поверхности моря – в верхней точке вертикальной траектории аппарата (вид а) и б)) и воспринимают солнечный свет, вырабатывая электроэнергию, с помощью которой и нагревают низкокипящую жидкость, где фиг. 2, а, показана в разрезе. При достижении достаточной температуры для ее испарения и достижения равновесного давления до расчетного, согласно графику и выбранному рабочему телу в [5], так, что давление на шток-поршень снизу достигает величины, достаточной для сжатия возвратной пружины 6 [9] и перемещения шток-поршня в крайнее верхнее положение – Фиг. 2, а). В верхнем положении, чтобы сохранить неизменной величину минимального водоизмещения для погружения аппарата, когда водоизмещение минимально, шток-поршень фиксируют и удерживают фиксатором 7 (который является также управляемым клапаном разгрузки) (Фиг. 2, б). Так как температура воды меняется в зависимости от акватории, глубины и времени года, что вызывает конденсацию, а следовательно, и изменение давления парогаза и возможную подвижку шток-поршня.
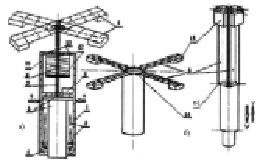
Рис. 3. а) и б) показана схематично цилиндрическая конструкция устройства переменного водоизмещения 1 для реализации способа в двух видах действия способа: видах а) в разрезе, б) на поверхности воды, а при погружении или всплытии в толще воды – в)
Величина управляемого водоизмещения определяется объемом выдвигаемой части штока: ΔV = L×D2π/4, где L – выход штока и его диаметр D. Задачу удержания объема ΔV выполняют с помощью фиксаторов 7, управляемых микроконтроллер 8.
Механические устройства: кронштейны, держатели батарей и другие механические изделия – могут быть изготовлены из любого материала, коррозийноустойчивого к механическим нагрузкам и морской воде, чаще всего в океанологической технике используют сплав АМГ-6 [10].
Для изготовления прочных корпусных деталей позиций 1 (рис. 2 и рис. 3) могут быть использованы стали марок AISI 304 и российский аналог согласно ГОСТ марки 08Х18Н10 [11].
В заключение, ветер и волны, ураганы, мельницы и гидроэлектростанции, даже страшные землетрясения – это ещё не самые максимальные проявления сил гравитации!
Библиографическая ссылка
Комаров В.С. ИСПОЛЬЗОВАНИЕ ЗАКОНОВ ГРАВИТАЦИИ ДЛЯ ИЗВЛЕЧЕНИЯ ЭНЕРГИИ ИЗ ВОДНОЙ СРЕДЫ С ЦЕЛЬЮ ОБЕСПЕЧЕНИЯ ОКЕАНОЛОГИЧЕСКИХ ИЗМЕРЕНИЙ // Международный журнал прикладных и фундаментальных исследований. 2019. № 12-1. С. 120-125;URL: https://applied-research.ru/en/article/view?id=12966 (дата обращения: 01.07.2026).
DOI: https://doi.org/10.17513/mjpfi.12966