
Scientific journal
International Journal of Applied and fundamental research
ISSN 1996-3955
ИФ РИНЦ = 0,556
TO THE QUESTION OF A WIRELESS ENERGY TRANSMISSION SYSTEM FOR ELECTRIC CARS

Электромобили (электромобили) имеют не только экологические преимущества, но также более широкие возможности контроля движения. Их электродвигатели обладают преимуществами более быстрого и точного отклика на крутящий момент по сравнению с двигателями внутреннего сгорания [1–3]. Тем не менее электромобили необходимо часто заряжать из-за их ограниченного пробега после зарядки. Поэтому важным моментом при эксплуатации электромобилей является наличие широкой сети зарядных устройств, подзарядка на которых должна максимально снизить нагрузку на пользователя [4–6].
Беспроводная передача энергии (БПЭ) может облегчить сложные операции зарядки посредством исключения использования проводки. В последние годы динамическая система БПЭ для электромобилей привлекает все большее внимание. Эта система позволит увеличить дальность пробега электромобилей после каждой зарядки и уменьшить размеры аккумуляторов электромобилей. Однако при применении электромобилей на неровных дорогах и на больших расстояниях важно максимально упростить наземные сооружения зарядки электромобилей. Кроме того, очень эффективная и стабильная подача энергии должна быть достигнута независимо от изменения положения приемника, который оборудован в транспортном средстве. БПЭ посредством магнитно-резонансной связи может обеспечить высокоэффективную передачу на расстояния до двух десятков см и обладает устойчивостью к смещению передатчика и приемника. Эффективность передачи и мощность зарядки определяются не только параметрами передатчика и приемника, но и нагрузкой. Состояние нагрузки можно контролировать с помощью преобразователя постоянного тока на стороне электромобиля. То есть возможно регулирование напряжения на стороне транспортного средства для максимизации эффективности [7–9]. Однако этот метод управления должен также регулировать напряжение на наземных устройствах зарядки, что приводит к их значительному усложнению. Поэтому желательно использовать метод управления, основанный на оценке напряжения только со стороны наземных устройств зарядки с использованием только информации об электромобиле. Такой способ позволяет контролировать мощность зарядки независимо от напряжения на наземных устройствах зарядки, поэтому исключается необходимость его регулирования. В результате наземные объекты могут быть упрощены.
Беспроводная передача энергии посредством магнитно-резонансной связи
В качестве эффективной системы зарядки предполагается использовать топологию последовательных схем БПЭ посредством магнитно-резонансной связи, эквивалентная схема которой показана на рис. 1.
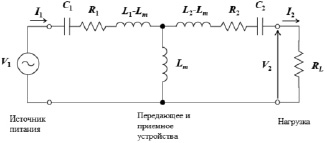
Рис. 1. Схема беспроводной передачи энергии через магнитно-резонансную связь
Передатчик и приемник, удаленные друг от друга на расстояние порядка нескольких см (фиксация расстояния осуществлялась интерферометрическими методами [10–12]), включают индуктивности L1, L2, последовательно-резонансные емкости C1, C2 и внутренние сопротивления R1, R2. Lm – взаимная индуктивность между L1 и L2. V1 и I1 – среднеквадратичные напряжение и ток на базовой стороне, в качестве которой берется наземная часть зарядной системы. V2 и I2 обозначают среднеквадратичные напряжение и ток на вторичной стороне, т.е. на стороне транспортного средства. RL – сопротивление нагрузки. Передатчик и приемник подобраны так, чтобы удовлетворять уравнению, которое записывается следующим образом:
 (1)
(1)
где ω0 – циклическая частота источника питания.
Отношения напряжений AV и токов AI между наземной стороной и транспортным средством описываются следующим образом:
 (2)
(2)
 (3)
(3)
В этом случае эффективность передачи η можно записать следующим образом:
 (4)
(4)
Величина нагрузки определяется соот- ношением
 (5)
(5)
Эффективность передачи и мощность нагрузки определяются параметрами катушки, резонансной частотой и сопротивлением нагрузки. Когда эффективность передачи максимальна, сопротивление нагрузки  можно выразить следующим образом:
можно выразить следующим образом:
 (6)
(6)
Мощность нагрузки максимальна, когда сопротивление нагрузки  определяется следующим образом (см. формулу (5)):
определяется следующим образом (см. формулу (5)):
 (7)
(7)
Контроль напряжения на стороне электромобиля
Из рис. 1 видно, что эквивалентное сопротивление нагрузки увеличивается в ответ на увеличение вторичного напряжения (напряжение со стороны электромобиля).
Вторичное напряжение  , которое максимизирует эффективность передачи, описывается следующим образом:
, которое максимизирует эффективность передачи, описывается следующим образом:
 (8)
(8)
Чтобы достичь максимальной эффективности, система управления вторичным напряжением должна быть сконструирована таким образом, чтобы удовлетворить уравнению (8).
Управление мощностью также может быть достигнуто контролем вторичного напряжения [13–15]. Однако он эффективен только в том случае, если вторичное напряжение контролируется ниже максимального вторичного напряжения  , которое выражается следующим образом:
, которое выражается следующим образом:
 (9)
(9)
Затем эквивалентное сопротивление нагрузки стремится к бесконечности и отношение AV напряжения становится насыщенным. Максимальная мощность получается, когда вторичное напряжение  задано следующим образом:
задано следующим образом:
 (10)
(10)
Для достижения требуемой мощности P*, разработана система контроля вторичного напряжения.
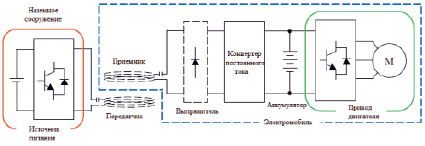
Рис. 2. Конфигурация системы управления мощностью на стороне транспортного средства
На рис. 2 показана конфигурация системы для управления мощностью на стороне транспортного средства. Преобразователь постоянного тока может управлять выходным напряжением выпрямителя. Как результат, можно также контролировать вторичное напряжение. Для эффективной передачи важно определить рабочий диапазон вторичного напряжения, который должен быть ниже  . В результате эталонное значение вторичного напряжения
. В результате эталонное значение вторичного напряжения  может быть выражено следующим образом:
может быть выражено следующим образом:
 (11)
(11)
 включает в себя информацию о первичном напряжении V1 (от источника питания на земле). Однако нежелательно требовать связи между транспортным средством и наземным оборудованием и регулировать первичное напряжение. Поэтому целью является метод оценки первичного напряжения с использованием только информации об автомобиле.
включает в себя информацию о первичном напряжении V1 (от источника питания на земле). Однако нежелательно требовать связи между транспортным средством и наземным оборудованием и регулировать первичное напряжение. Поэтому целью является метод оценки первичного напряжения с использованием только информации об автомобиле.
Принципиальная схема системы беспроводной системы передачи энергии показана на рис. 3.
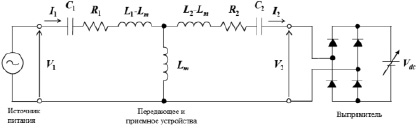
Рис. 3. Принципиальная схема беспроводной системы передачи энергии
При использовании топологии последовательных схем вторичный ток можно считать синусоидальной волной, колебания которой происходят на резонансной частоте с фазой, сдвинутой на 90 градусов по отношению к первичному напряжению. Если предполагается, что диоды согласованы с вторичным током, то вторичное напряжение становится прямоугольной волной, которая имеет такую же амплитуду, что и напряжение Vпт постоянного тока, и ту же фазу и резонансную частоту, что и вторичный ток. Следовательно, вектор вторичного напряжения определяется посредством разложения в ряд Фурье, и выражается следующим образом:
 (12)
(12)
На резонансной частоте уравнения для электрической цепи можно записать следующим образом:
 (13)
(13)
Следовательно, векторы токов первичной и вторичной обмоток можно записать в следующем виде:
 (14)
(14)
 . (15)
. (15)
Из уравнения (15) средний ток Iпт от выпрямителя к преобразователю постоянного тока выражается следующим образом:
 (16)
(16)
Если взаимная индуктивность не изменяется кардинально, первичное напряжение получается из оценочного уравнения, которое описывается следующим образом:
 (17)
(17)
То есть получено постоянное напряжение Vпт для управления вторичным напряжением. Отсюда следует, что датчик тока необходим только как дополнительный датчик для измерения входящего тока Iпт.
Выводы
В качестве эффективной системы зарядки электромобиля предложена топология последовательных схем БПЭ посредством магнитно-резонансной связи.
Рассмотрена возможность управления со стороны транспортного средства для достижения требуемой мощности и предложен метод управления, основанный на оценке напряжения на наземных устройствах, использующий только информацию на стороне транспортного средства.
Для достижения требуемой мощности, разработана система контроля напряжения на стороне транспортного средства. Показано, что преобразователь постоянного тока может управлять выходным напряжением выпрямителя. Как результат, можно также контролировать напряжение на стороне транспортного средства.
Контроль вторичного напряжения позволяет осуществить контроль мощности источника питания, подключаемого к электромобилю, с целью выбора оптимального режима зарядки этого транспортного средства.
Библиографическая ссылка
Шатманов О.Т., Исманов Ю.Х., Айдаралиев Ж.К., Барпиев Б.Б. К ВОПРОСУ О БЕСПРОВОДНОЙ СИСТЕМЕ ПЕРЕДАЧИ ЭНЕРГИИ ДЛЯ ЭЛЕКТРОМОБИЛЕЙ // Международный журнал прикладных и фундаментальных исследований. 2019. № 12-2. С. 229-233;URL: https://applied-research.ru/en/article/view?id=12985 (дата обращения: 12.07.2026).
DOI: https://doi.org/10.17513/mjpfi.12985