
Scientific journal
International Journal of Applied and fundamental research
ISSN 1996-3955
ИФ РИНЦ = 0,556
CHARACTERISTICS OF PRECISE MOTOR CONTROL IN HUMAN UNDER MICROGRAVITY CONDITIONS

Многолетние исследования, выполнявшиеся сотрудниками ГНЦ РФ – ИМБП РАН, показали, что длительное пребывание в невесомости неизбежно сопровождается развитием так называемого гипокинетического двигательного синдрома, характеризующегося наличием глубоких нарушений во всех звеньях двигательной системы и в первую очередь в ее исполнительном звене – скелетных мышцах [1]. Даже при кратковременных воздействиях гипокинетический синдром проявляется глубоким снижением мышечного тонуса и, соответственно, силы и скорости мышечных сокращений, выраженных преимущественно в гравитационной мускулатуре ног и туловища, мышечной гиперрефлексией и координационными нарушениями, существенно снижающими вертикальную устойчивость и точностные возможности систем управления движениями [2, 3]. Так, снижается точность воспроизведения мышечных усилий, увеличивается время выполнения двигательных задач, возрастает число ошибок и разброс конечных позиций движений [4]. В совокупности эти изменения составляют картину гипогравитационной атаксии. В экспериментах, проведенных в полетах по параболе Кеплера, в невесомости наблюдали затруднения при выполнении точностных двигательных задач, снижение точности воспроизведения по памяти дозированных и дифференцирования близких по величине мышечных усилий, увеличение времени реализации двигательных реакций [4]. Аналогичные затруднения в оценке мышечных усилий и несоразмерность движений отмечали в ранние сроки полетов и члены экипажей космических экспедиций [5].
К факторам космического полета, которые могут влиять на систему двигательного управления, относятся невесомость, опорная и весовая разгрузка, изменение биомеханики движений и др. Применение наземных моделей физиологических эффектов микрогравитации позволяет детально исследовать изолированное влияние этих факторов. Модель «сухой» иммерсии воспроизводит опорную разгрузку [2, 3, 6].
Цель работы: исследование влияния микрогравитации на характеристики точностных движений.
Материалы и методы исследования
Экспериментальные исследования проводили в ГНЦ РФ – ИМБП РАН на стендовой базе «Сухая иммерсия», входящей в состав УНУ «Медико-технический комплекс для отработки инновационных технологий космической биомедицины в интересах обеспечения орбитальных и межпланетных полётов, а также развития практического здравоохранения».
Исследования проводили с участием 12 здоровых испытателей-добровольцев в возрасте 24–45 лет (рост не более 182 см, вес не более 75 кг). Испытатели были допущены к участию в эксперименте врачебно–экспертной комиссией Института и подписали Информированное согласие на участие в исследовании в соответствии с положением Хельсинкской декларации прав человека. Процедура исследований была предварительно рассмотрена и одобрена Комиссией по биомедицинской этике ГНЦ РФ – ИМБП РАН. Согласно программе эксперимента в ходе иммерсионного воздействия никакие другие воздействия не применялись.
Моделирование эффектов микрогравитации
В качестве экспериментальной модели микрогравитации использовали 5-суточную «сухую» иммерсию (СИ), которая, согласно данным многочисленных исследований, наиболее корректно и полно воспроизводит двигательные эффекты невесомости [2, 5]. По условиям модели в ходе эксперимента испытатели находятся в ванне размером 200х100х100, наполненной водой температурой 33,5 °С, от которой их отделяет тонкая эластическая водонепроницаемая ткань площадью в несколько раз больше площади поверхности воды. В иммерсионную среду испытатели погружаются в горизонтальном положении до уровня шеи (рис. 1).

Рис. 1. Модель гипогравитации – «сухая» иммерсия [6]
Исследование точностных характеристик произвольных движений ног в условиях «сухой» иммерсии
Для изучения особенностей выполнения точностных произвольных движений использовали задачу градации усилия при осуществлении односуставных изометрических подошвенных сгибаний (рис. 2).


Рис. 2. Слева: схема экспериментальной установки для исследования точностных характеристик движений ног. Справа: пример записи исследования точностных характеристик движений ног
Выполняя задачу, испытуемые должны были развивать серию усилий (от минимального до максимального) с минимальной разницей между соседними движениями. Изометрические подошвенные сгибания ноги осуществлялись в положении лежа на спине. Выполнявшая задачу нога была фиксирована к тендометрической педали, другая – находилась в состоянии покоя. При выполнении тестов с помощью тензометрического датчика, встроенного в педаль, через внешний модуль АЦП системы PowerLab 16/35 и восьмиканальный усилитель «OctalBioAmp» фирмы ADInstruments (Австралия) регистрировали развиваемое трехглавой мышцей голени усилие, а также электромиограмму мышц голени. Выполняемые в начале задачи минимальные усилия при этом рассматривали как абсолютный порог системы управления движением, а среднюю разницу между соседними усилиями – как порог дифференциальный. Случаи, когда последующее усилие не превышало предыдущего, оценивались как ошибки. В ходе анализа учитывали число выполненных усилий и количество ошибок.
Эксперименты проводились до СИ, дважды в течение СИ и на следующий день после его завершения.
Для проведения статистического анализа полученных результатов использовался пакет STATISTICA, версия 10. Сравнительный анализ показателей осуществлялся непараметрическими методами с использованием критерия Уилкоксона. Значимость отличий группы параметров от нуля определялась на уровне p < 0,05 для средних значений. Результаты представлены как среднее ± стандартная ошибка среднего.
Результаты исследования и их обсуждение
В условиях «сухой» иммерсии испытуемые обычно правильно выполняли моторную задачу. Однако анализ данных выявил снижение точности в системе управления движениями ног, проявляющееся уменьшением количества выполненных градаций и повышением дифференциального порога усилия.
На 5-й день СИ количество выполненных градаций значительно снижалось – до 29,5 ± 14,3 против 36,5 ± 13,8 в фоновых исследованиях (р < 0,05) (рис. 3, А).
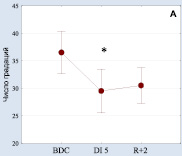
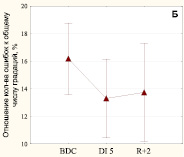
Рис. 3. Число выполняемых градаций (А) и отношение количества ошибок к общему числу градаций (Б) до СИ, на пятые сутки воздействия и через двое суток после завершения СИ. Примечание: BDC – фоновые данные; DI 5 – пятый день СИ; R + 2 – вторые сутки после СИ; * – достоверные изменения по сравнению с фоновыми значениями, p < 0,05
Отношение количества ошибок к общему количеству градаций в ходе СИ при этом постепенно уменьшалось с 16,2 ± 9,3 % до 13,3 ± 10,3 %, что было связано, по-видимому, с эффектом обучения (рис. 3, Б).
Величина дифференциального порога усилия в СИ значительно выросла на 5-й день СИ – до 5,7 ± 1,7 (против 4,5 ± 1,5 при сборе фоновых данных (р < 0,05) (рис. 4, А). Также в этот период отмечалась тенденция к повышению абсолютного порога мышечного усилия (рис. 4, Б).
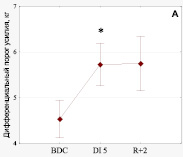
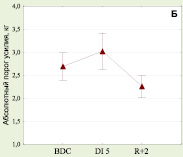
Рис. 4. Значения дифференциального порога усилия (средняя разница между величиной соседних ступеней) (А) и значения абсолютного порога усилия (минимальное усилие) (Б) до СИ, на пятые сутки воздействия и через двое суток после завершения СИ. Примечание: BDC – фоновые данные; DI 5 – пятый день СИ; R + 2 – вторые сутки после СИ; * – достоверные изменения по сравнению с фоновыми значениями, p < 0,05
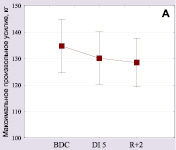
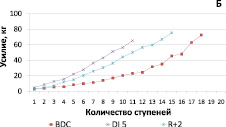
Рис. 5. Значения максимального произвольного усилия (А) и амплитуда и количество выполняемых ступеней у испытателя 6 (Б) в задаче на градацию усилия до СИ, на пятые сутки воздействия и через двое суток после завершения СИ. Примечание: BDC – фоновые данные; DI 5 – пятый день СИ; R + 2 – вторые сутки после СИ
После завершения СИ у 10 испытателей из 12 было зарегистрировано снижение максимальной произвольной силы мышц голени на 10 % (рис. 5, А), свидетельствовавшее, по-видимому, об изменении скоростно-силовых свойств мышц, что подтверждается данными других исследований [7].
Линейные графики, отображающие зависимость между порядковым номером движения и его амплитудой, приобретали более крутой характер (рис. 5, Б).
Настоящее исследование показывает, что пребывание в условиях 5-суточной опорной разгрузки, не вызывающей глубоких изменений в активности механизмов контроля, оказывает влияние на точность систем управления. В движениях программного типа снижение точности выполнения двигательных задач состояло в значительном уменьшении числа различимых градаций силы с увеличением абсолютного и дифференциального порогов.
Сравнение данных, полученных в наших исследованиях, с результатами, полученными в исследованиях с использованием другой модели микрогравитации – антиортостатической гипокинезии, показало, что изменения, наблюдаемые на первой стадии антиортостатической гипокинезии, были аналогичны изменениям, наблюдаемым в СИ [8]. Как и при «сухой» иммерсии, гипокинезия вызывала относительно быстрое увеличение изменений в системе точностного контроля, хотя скорость их развития была существенно меньшей (максимальные изменения наблюдались через 3–5 дней «сухой» иммерсии по сравнению с 5–15 днями с гипокинезией), а глубина нарушений была ниже. Возможно, глубина и скорость развития изменений тесно связаны со степенью опорной разгрузки, которая максимальна при иммерсии.
Анализ данных, полученных в экспериментах с «сухой» иммерсией, привел к предположению, что существует связь между наблюдаемыми изменениями и уменьшением потока афферентации, и, как следствие, снижением тонуса антигравитационной мускулатуры [2, 9]. Результаты исследований поперечной жесткости мышц голени, выполненных после 7-дневных космических полетов, выявили снижение мышечного тонуса на 15–20 % в m. gastrocnemius и m. soleus на вторые сутки после приземления [2]. Это явление было детально изучено в иммерсионных экспериментах, демонстрирующих быстрое снижение (до 40–50 %) поперечной жесткости во всех трех головках разгибателя голени – латеральной и медиальной m. gastrocnemius и наиболее заметной – в m. soleus в течение первых 6 часов воздействия [10]. Снижение поперечной жесткости одиночных мышечных волокон было также обнаружено в m. soleus после 7-дневной СИ [2].
Основной вклад в развитие нарушений точности после кратковременных воздействий вносят изменения в активности тонических механизмов вследствие эффектов невесомости и частичной проприоцептивной деафферентации. Последнее, как известно, приводит к гиперчувствительности проприоцептивных входов в спинном мозге, с неспецифическим увеличением возбудимости центральных структур и снижением эффективности тормозных процессов. На повышенную возбудимость мотонейронов и снижение процессов сегментарного торможения указывают изменения в кривой вовлечения Н-рефлекса, наблюдаемое в условиях иммерсии [11]. Резкое снижение эффективности тормозных процессов может быть причиной синхронизации активности двигательных единиц, наблюдаемой в это время, а также дестабилизации их ритмичности. Обратное торможение является одним из факторов, лежащих в основе стабильной активности мотонейронов [12]. Исключение опоры, приводящее к значительному снижению активности тонической системы, может рассматриваться как исходный триггерный фактор для изменения характеристик точностных движений. Как показывают результаты, полученные нами, задача поддержания относительно небольших усилий (аналогичных постуральным движениям) при переходе к СИ, которая в нормальных земных условиях выполняется в основном небольшими тоническими двигательными единицами, по-видимому, решается путем вовлечения фазных двигательных единиц в выполнение движения.
Исключение опорной афферентации инактивирует пул медленных двигательных единиц, что приводит к селективной инактивации и последующей атонии и атрофии мышечных волокон, экспрессирующих медленные изоформы тяжелой цепи миозина (которые составляют большинство мышечных волокон soleus). Волокна, которые потеряли значительную часть молекул цитоскелета, неспособны к эффективной моторной мобилизации актомиозина, что приводит к снижению чувствительности к кальцию и снижению максимального напряжения в проницаемых волокнах. Уменьшение размеров как медленных, так и быстрых типов мышечных волокон достигало 5–9 % через 3 дня и 15–18 % после 7 дней пребывания в «сухой» иммерсии [13, 14]. Молекулярные исследования также выявили изменения в сигнальных ответах мышц на ранних стадиях гравитационной разгрузки [15].
Заключение
Таким образом, наши исследования показали, что 5-суточная опорная разгрузка сопровождается снижением точностных возможностей систем управления движениями ног, что проявляется в уменьшении общего числа различаемых градаций и повышении дифференциального порога мышечных усилий при выполнении плантарной флексии.
Исследование выполнено при финансовой поддержке РФФИ в рамках научного проекта № 18-315-00287 мол_а.
Библиографическая ссылка
Шигуева Т.А., Китов В.В., Томиловская Е.С., Козловская И.Б. ХАРАКТЕРИСТИКИ ТОЧНОСТНОГО УПРАВЛЕНИЯ ДВИЖЕНИЯМИ ЧЕЛОВЕКА В УСЛОВИЯХ МИКРОГРАВИТАЦИИ // Международный журнал прикладных и фундаментальных исследований. 2020. № 2. С. 34-39;URL: https://applied-research.ru/en/article/view?id=13005 (дата обращения: 17.07.2026).
DOI: https://doi.org/10.17513/mjpfi.13005