
Scientific journal
International Journal of Applied and fundamental research
ISSN 1996-3955
ИФ РИНЦ = 0,556
SOLUTION OF THE PROBLEM OF OPTIMUM CONTROL OF THE VERTICAL LIFT OF THE PROBE ROCKET WITH REFINING THE AERODYNAMIC RESISTANCE MODEL

Эта классическая задача оптимального управления ранее была неоднократно решена и результаты представлены в таких работах, как [1, 2]. Следует, однако, отметить, что для аэродинамического сопротивления в них были использованы упрощенные зависимости. В [1] полуэмпирическая формула для аэродинамического сопротивления
Xаэр ,
,
где сx – коэффициент аэродинамического сопротивления, ρ – плотность воздуха, зависящая от высоты, V – скорость полета, S – характерная площадь летательного аппарата (в данной задаче площадь миделя ракеты) применялась с допущениями: сx = const, плотность воздуха аппроксимировалась экспоненциальной зависимостью по высоте  . Положительные коэффициенты a1, a2, вероятно, были подобраны методом наименьших квадратов. Из экспериментальных данных известно, что коэффициент аэродинамического сопротивления сильно зависит от числа Маха полета (рис. 1 из [3]), а кривая плотности, рассчитанная в соответствии с [4], не очень точно аппроксимируется экспоненциальной зависимостью (рис. 2).
. Положительные коэффициенты a1, a2, вероятно, были подобраны методом наименьших квадратов. Из экспериментальных данных известно, что коэффициент аэродинамического сопротивления сильно зависит от числа Маха полета (рис. 1 из [3]), а кривая плотности, рассчитанная в соответствии с [4], не очень точно аппроксимируется экспоненциальной зависимостью (рис. 2).
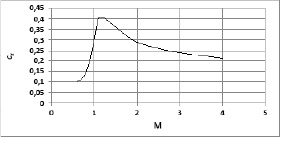
Рис. 1. Коэффициент аэродинамического сопротивления ракеты при угле атаки равном нулю в зависимости от числа Маха
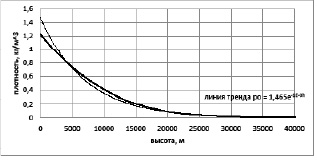
Рис. 2. Аппроксимация плотности воздуха по высоте экспоненциальной зависимостью
В работе [2] также принималось постоянство коэффициента аэродинамического сопротивления.
Качественное решение задачи ОУ выглядит следующим образом: в начале взлета двигатель должен работать на максимальном режиме, далее следует участок особого режима управления с пониженной тягой, по окончанию топлива – движение по инерции до некоторой высоты.
Цель исследования: провести численный эксперимент для метеорологической ракеты типа МР20 с уточнением математической модели для аэродинамического сопротивления в соответствии с [3] и [4], по полученным количественным результатам расчетов провести анализ целесообразности применения особого режима управления.
Математические модели и численные методы
При заданном весовом балансе ракеты будем максимизировать высоту подъема ракеты.
J = hподъема → max или
интегральный критерий 
Система уравнений движения при вертикальном подъеме ракеты-зонда:
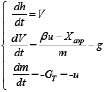
где h – высота, м; V – скорость, м/с; Р = βu тяга двигателя, Н; β – импульс РДТТ, м/с; u = GT – управление, расход топлива, кг/с; Xаэр – сила аэродинамического сопротивления, Н; m – масса ракеты, кг; t – время, с;  – ускорение свободного падения, м/с2, R – радиус Земли. В качестве исходных данных были приняты технические характеристики метеорологической ракеты МР-20: калибр dmax = 450 мм, взлетная масса m0 = 1620 кг, импульс двигателя β = 2011 м/сек считался постоянным, максимальный расход топлива u = GТ = 50,54 кг/сек, масса топлива 1200 кг.
– ускорение свободного падения, м/с2, R – радиус Земли. В качестве исходных данных были приняты технические характеристики метеорологической ракеты МР-20: калибр dmax = 450 мм, взлетная масса m0 = 1620 кг, импульс двигателя β = 2011 м/сек считался постоянным, максимальный расход топлива u = GТ = 50,54 кг/сек, масса топлива 1200 кг.
При использовании принципа максимума Понтрягина функция Понтрягина имеет вид

 .
.
ψh, ψV, ψm – сопряженные переменные.
Функция линейна по управлению, коэффициент при управлении – функция переключения
Фпер .
.
Оптимальное управление в этом случае
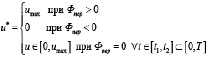
Последний случай относится как раз к особому режиму управления. Исследованиям управления с особым режимом посвящены такие работы, как [5, 6, 7]. В этом случае должно выполняться на [t1, t2]

Вначале был рассмотрен случай без особого режима управления, решение краевой задачи для системы ДУ

с краевыми условиями:
h(0) = 0, V(0) = 0, m(0) = m0 = 1620 кг,
V(Т) = 0, m(Т) = m0 – mтопл = 420 кг, ψh(Т) = 0
было получено методом пристрелки. Метод пристрелки или стрельбы дает наиболее точные результаты численного решения краевых задач [1, 8]. Производные функции Понтрягина по сопряженным переменным вычислялись с учетом того, что плотность воздуха, скорость звука и, соответственно, число Маха полета, а следовательно, и коэффициент аэродинамического сопротивления являются функциями высоты. Коэффициент аэродинамического сопротивления является также еще и функцией скорости полета. Внешний цикл – модифицированный метод Ньютона обращался к численному методу решения задачи Коши – методу Рунге – Кутты 4-го порядка. Для сходимости метода Ньютона момент отключения двигателя по израсходованию запаса топлива уточнялся линейной интерполяцией массы ракеты на шаге метода Рунге – Кутты, на котором заканчивалось топливо. После чего этот шаг пересчитывался с тягой двигателя, равной среднеинтегральному значению по указанному промежутку времени. Алгоритм пересчета был предложен для задач оптимального управления с переключением в [1], также применяя этот алгоритм, удалось достичь сходимости метода Ньютона в задачах с переключением в [9] и [10].
Параметры пристрелки и невязки для этого варианта расчета выбирались следующие:
ψh (0), ψV (0), ψm (0), Т,
δ1 = V(Т) → 0, δ2 = ψh(Т) → 0,
δ3 = H(Т) → 0, δ4 = Фпер(tпер ) → 0.
Полученные результаты не соответствовали теории: функция Понтрягина не была равна нулю на всем протяжении, функция переключения меняла знак дважды, причем в точке переключения меняла знак с минуса на плюс, а не наоборот. Таким образом, вывод о неоптимальности управления без особого режима подтвердился. При этом при обнулении силы аэродинамического сопротивления в математической модели функция переключения и функция Понтрягина вели себя согласно теории: функция Понтрягина была равна нулю с точностью до 4-го знака, функция переключения меняла знак один раз с плюса на минус именно в момент отключения двигателя в связи с израсходованием всего топлива.
Попытка реализовать алгоритм метода пристрелки для варианта с особым режимом управления при получении оптимального управления на особом режиме из равенства  (полное выражение слишком громоздко и в силу этого не приводится) не увенчалась успехом. Оптимальное управление на особом режиме зависит от сопряженных переменных, которые являются параметрами пристрелки в начальный момент времени, и в процессе поиска решения методом Ньютона при неточно выбранном начальном приближении получаемые значения управления на особом режиме не удовлетворяют ограничениям: u ∈ [0, umax].
(полное выражение слишком громоздко и в силу этого не приводится) не увенчалась успехом. Оптимальное управление на особом режиме зависит от сопряженных переменных, которые являются параметрами пристрелки в начальный момент времени, и в процессе поиска решения методом Ньютона при неточно выбранном начальном приближении получаемые значения управления на особом режиме не удовлетворяют ограничениям: u ∈ [0, umax].
В силу указанных причин было принято решение отказаться от решения задачи методом пристрелки и реализовать более простой алгоритм с использованием результатов, полученных в предыдущих работах [1] (рис. 3), а именно, постоянства тяги на особом режиме управления.
Алгоритм расчета с двумя переключениями состоял в следующем: первый вызов метода Рунге–Кутты при максимальном значении тяги ограничивался временем t1, далее осуществлялся второй вызов метода Рунге–Кутты с пониженной тягой двигателя u = uotn ∙ umax, третий вызов при отключенном двигателе ограничивался достижением нулевой скорости полета. Были рассчитаны варианты при значениях t1 = 3, 5, 7, 9, 11 секунд. Для каждого из этих вариантов времени также варьировалась величина коэффициента уменьшения тяги uotn = 0,35; 0,45; 0,55; 0,65; 0,75, 0,85.
Таким образом, было получено решение для 30 вариантов управления тягой (+1 расчет без особого режима с временем работы двигателя около 24 с).
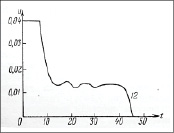
Рис. 3. 12-я итерация решения задачи о вертикальном подъеме ракеты-зонда методом проекции градиента [1]
Результаты расчетов
Результаты численного эксперимента для оптимального управления с участком особого режима представлены на рис. 4 и 5.
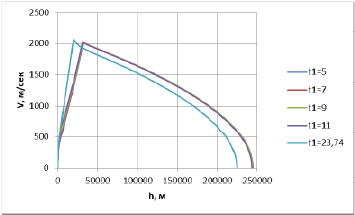
Рис. 4. Изменение скорости по высоте для uotn = 0,55 при разных значениях времени работы двигателя на максимальном режиме t1. Значение t1 = 23,74 с соответствует варианту без особого режима
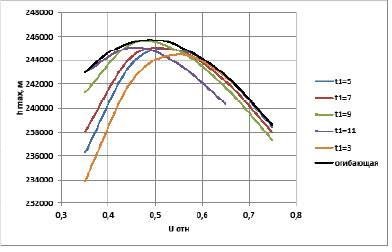
Рис. 5. Достижимая высота при различных вариантах регулирования двигателя
Заключение
Наличие особого режима управления связано с аэродинамическим сопротивлением воздуха, слишком быстрый набор скорости в плотных слоях атмосферы приводит к большим энергетическим потерям.
Численный метод пристрелки в промежуточных приближениях не дает возможности определения тяги на особом режиме в заданном диапазоне, что приводит к выводу о нецелесообразности применения этого метода для решения задач с переключением и наличием участка особого управления.
При работе на максимальном режиме около 8 с и дальнейшем уменьшении тяги двигателя до 50 % от максимального значения можно увеличить высоту подъема данной ракеты на 25 км, что составляет около 11 % от высоты, достигаемой без применения особого режима управления. Учитывая эти результаты, можно сделать вывод о незначительном увеличении эффективности с применением особого управления при решении подобных задач. С учетом необходимости создания твердотопливного реактивного двигателя с регулируемой тягой для реализации управления с особым режимом целесообразность применения особого режима становится спорной.
Библиографическая ссылка
Мозжорина Т.Ю., Попов А.С. РЕШЕНИЕ ЗАДАЧИ ОПТИМАЛЬНОГО УПРАВЛЕНИЯ ВЕРТИКАЛЬНЫМ ПОДЪЕМОМ РАКЕТЫ-ЗОНДА С УТОЧНЕНИЕМ МОДЕЛИ АЭРОДИНАМИЧЕСКОГО СОПРОТИВЛЕНИЯ // Международный журнал прикладных и фундаментальных исследований. 2021. № 7. С. 46-50;URL: https://applied-research.ru/en/article/view?id=13247 (дата обращения: 30.06.2026).
DOI: https://doi.org/10.17513/mjpfi.13247