
Scientific journal
International Journal of Applied and fundamental research
ISSN 1996-3955
ИФ РИНЦ = 0,556
USE OF UKB ANTENNA WITHOUT DETERMINING TOTAL PHASES

Системы акустической навигации с ультракороткой базой получили широкое распространение в силу двух основных свойств – отсутствия необходимости постановки донных маяков, используемых системами с длинной базой, и относительно небольшого размера приемной судовой антенны, по сравнению с системами с короткой базой. Принцип действия систем с УКБ основан на использовании нескольких разнесенных приемных элементов, анализе принятых ими сигналов и определении направления прихода акустической волны, которое после учета параметров собственной ориентации антенны и времени распространения звука между судовой антенной и ответчиком пересчитывается в координаты маяка-ответчика. Способ вычисления направления прихода производителями, как правило, в деталях не приводится, однако известно, что в большинстве навигационных систем применяется комбинация методов короткой и ультракороткой баз. Дело в том, что угловое разрешение УКБ систем, или характерная ошибка в определении направления, в основном зависит от двух факторов – отношения длины волны звука к разнесению приемников и от отношения амплитуд сигнала и шума. Так, в описании системы POSIDONIA компании IXEA OCEANO приводится оценка стандартного отклонения оценки направления в виде
 , (1)
, (1)
где σ – стандартное отклонение оценки направления, λ – длина волны звука, d – пространственное разнесение приемников, θ – угол падения падающей волны, S и N – характерные интенсивности соответственно сигнала и шума. Аналогичное выражение в других обозначениях приводится и в работе [1]. Из него следует, что при фиксированном отношении сигнал/шум точность возрастает при увеличении размеров антенны. Однако при разнесении приемников на расстояние, большее половины длины волны звука, появляется неопределенность в вычислении направления, если известны только фазы на приемниках. Необходимо привлечение дополнительной информации, которая может быть основана либо на использовании дополнительных приемников [1, 2], либо на использовании сложных сигналов и измерении не только фаз, но и задержек, как, например, в системе POSIDONIA.
Целью исследования являлся поиск такой процедуры определения направления приходящей на антенну звуковой волны, которая обеспечивала бы высокое угловое разрешение антенны за счет увеличения размера антенны и не требовала бы дополнительных измерений, кроме фазовых, например, определения задержек. Помимо этого, целью работы также являлось определение оптимальной конструкции антенны и границ применимости метода в зависимости от различных параметров, таких как количестао приемников, частота звука, размер антенны и отношение шума к сигналу.
Материалы и методы исследования
В качестве предмета исследования была выбрана модель, в рамках которой плоская волна падает на массив гидрофонов, расположенных на плоскости. Предлагаемый новый способ определения направления прихода звукового сигнала использует анализ фаз при разнесении приемников на значительное расстояние без вычисления полной фазы (без определения целого числа длин волн). Принцип состоит в выборе такого направления из числа заранее определенных возможных, которое обеспечивает минимальный отклик антенны с этого направления. Способ поиска направления по минимуму сигнала хорошо известен в радиотехнике, путем точной настройки фазированной антенны по частоте и дистанциям между приемниками с последующим механическим сканированием пространства. При этом направление на источник выбирается тогда, когда сигнал в этом направлении минимален, а с других уверенно регистрируется. В акустике оказывается возможной одновременная регистрация сигналов на заданной частоте по нескольким каналам с последующей цифровой обработкой данных, по сути реализующей алгоритм точной аппаратной настройки антенны с заданного направления на минимум отклика.
Результаты исследования и их обсуждение
Для проверки данного метода была разработана программа и произведено численное моделирование явления. Программа предназначена для анализа свойств приемных антенн, имеющих центрально-симметричное расположение приемников, с возможностью менять их количество, частоту звука, размер антенны и уровень шума на приемниках относительно уровня сигнала. Для анализа влияния шума предполагалось, что шум на приемниках не коррелирован и имеет равномерное распределение вероятности амплитуды на единичном интервале с заданным весом.
Свойства антенны исследовались с помощью сравнения заданного направления прихода сигналов с найденным по предлагаемому методу. Выбор заданного направления и найденного определялся проекциями вектора, модуль которого равен длине звуковой волны, на плоскость антенны по двум осям. Таким образом, при равномерном шаге проекций каждой точке на области плоскости антенны, ограниченной окружностью с радиусом, равным длине волны используемой частоты, однозначно соответствовало некоторое направление, которому соответствует азимут и угол падения (тилт). Преимущество использования равномерного шага по проекциям по сравнению с равномерным шагом по углам состоит в том, что после вычисления реакции антенны на каждое из направлений и отображение величины этой реакции на плоскости формируется растровое изображение с равномерной плотностью (количеством точек изображения на единицу площади поверхности). При использовании равномерного шага по азимуту неоправданно возрастает плотность изображения в центре круга направлений, а по углу падения – на краях круга, причем это никак не соответствует реальному угловому разрешению. В задаче использовалась условная длина вектора 500 (проекции единичного вектора X и Y представимы в виде (1 / 500) × N, где N – целое число, -500 < N < 500), что позволяет задать π×5002 направлений прихода. Величина 1/500 является максимальным угловым разрешением метода при направлениях, близких к нормали.
При таком выборе модуля вектора падающей волны (при поиске направления прихода) необходимо вычислить отклик антенны по количеству направлений, которое немного меньше миллиона.
В качестве основы была выбрана модель антенны, представляющая собой ряд приемников, расположенных на поверхности акустически жесткого экрана. Это позволяет исключить эффект переизлучения звука элементами крепления гидрофонов, прочным корпусом с электронными блоками и возможными прочими источниками фазовых искажений звукового поля, в отличие от других работ, использующих модель приемной антенны, состоящей из расположенных в свободном пространстве точечных приемников [3–6].
Следует отметить, что расчеты были сделаны в предположении, что приемники находятся на одной плоскости и образуют правильный многоугольник.
Для расчета фазовых соотношений была составлена процедура вычисления разности фаз в точках приема, которая использовала координаты точек приема (X1, Y1, X2, Y2), угол падения звука на плоскость антенны θ, азимут горизонтальной проекции падающей волны α, а также частоту звука (длину волны λ):
DeFi = F(X1, Y1, X2, Y2, θ, α, λ). (2)
Первоначально координаты приемника задавались аналитически, в дальнейшем была обеспечена возможность вводить массив координат точек приема, что полезно ввиду возможного неидеального изготовления антенны и коррекции координат по результатам реального измерения. Помимо координат приемников, задавался массив пар элементов, разность фаз между которыми использовалась в ходе вычислений. Реально эта возможность использовалась только для семиэлементной антенны, для других конфигураций использовался кольцевой перебор соседних приемников.
После выбора конфигурации приемной антенны (количества элементов, диаметра образующей окружности, частоты звука) производится расчет и составляется массив попарных разностей фаз между приемниками для выбранных пар в виде (3).
Здесь DF[X,Y][I] – двумерный массив векторов с размерностью I – количеством используемых пар приемников, X и Y – проекции анализируемого направления, X1I и Y1I – координаты первого приемника I-й пары, X2I и Y2I – координаты второго приемника I-й пары, TETAXY и ALPHAXY – соответственно угол падения и азимут горизонтальной проекции вектора звуковой волны, имеющей проекции на плоскость антенны X и Y. Реально в дальнейших расчетах используются и, соответственно, запоминаются только квадратурные компоненты разностей фаз (4).
При этом информация о полной фазе, с учетом целого числа длин волн, не сохраняется.
Размер массива DF в основном определяет необходимый объем памяти вычислителя. Для сокращения затрачиваемых ресурсов вычислителя массив был сформирован в целых числах, используя модуль квадратур, равный 1000. Скорость звука в воде учитывается при пересчете частоты в длину волны. Массив DF остается постоянным, пока не меняются свойства антенны или среды.
Принимаемый сигнал характеризуется наклоном и азимутом падающей звуковой волны. В программе они задаются с помощью выбора проекций вектора падающей волны на плоскость антенны, в ручном режиме для предварительного анализа и в автоматическом при исследовании статистических характеристик. После задания направления падающей волны с помощью формулы (2) вычисляются синус и косинус разности фаз (5) тех же пар, что используются при вычислении выражений (4).
Здесь θ и α – соответственно угол падения и азимут падающей с выбранного направления волны. Отклик антенны вычисляется в виде (6).
 . (3)
. (3)
 (4)
(4)
SIG[I].S = sin DeFi(X1, Y1, X2, Y2, θ, α, λ),
SIG[I].C = cos DeFi(X1, Y1, X2, Y2, θ, α, λ). (5)
 (6)
(6)

Рис. 1. Пример отображения цели и результата ее поиск: на левом поле – выбранное направление, на правом – результат ее поиска
Иными словами, отклик антенны есть сумма модулей синусов разностей углов, определенных для выбранного направления прихода, и для каждого заранее вычисленного для каждого из возможных направлений. Здесь X и Y – проекции направлений прихода, причем соответствующая этим проекциям точка в фазовом пространстве направлений не может выходить за границы окружности с радиусом 500 (в данной версии программы).
В результате вычислений появляется двумерный массив скалярной величины RESP. Поскольку шаг по аргументам X и Y равномерный, результат можно представить в виде растрового изображения, каждая точка которого соответствует некоторому направлению. Отображение производилось путем кодирования амплитуды отклика градациями серого, всего 256 градаций, при этом амплитуда 0 соответствовала черному цвету, амплитуда 255 – белому. При однозначном восстановлении направления и необходимом масштабировании амплитуды отклика (усилении) результатом являлось изображение, на котором на белом фоне присутствовала одна-единственная серая точка (рис. 1).
Следует подчеркнуть, что на левом поле рисунка положение цели отображено условным знаком – кружком, а на правом приведено акустическое изображение, полученное по описанной технологии.
Для пятиэлементной антенны при отношении диаметра образующей окружности к длине волны, равном 5, и нулевом шуме получен рис. 1. Численная оценка искомого направления по проекциям производится путем поиска минимума отклика антенны по всем возможным направлениям прихода сигнала. Далее производится пересчет проекций в угол падения и азимут.
Первоначальная оценка свойств антенн производилась по количеству приемников. Оказалось, что 3, 4 и 6 элементные антенны при разнесении приемников более чем на половину длины волны не позволяют однозначно определить направление прихода сигнала. Результаты поиска направлений для антенн, состоящих из 3, 4 и 6 приемников, представлены на рис. 2.
Оценки проводились для частоты 75 кГц (длина волны 2 см), направление прихода – в плоскости антенны крайнее правое.
Для пятиэлементной антенны правильный результат поиска цели обеспечивается при условии, что отношение диметра образующей окружности к длине волны не превышает величины 6. Результат поиска реакции антенны на акустический сигнал может быть представлен в виде трехмерной поверхности. Область минимума при этом образует нечто вроде воронки, глубина которой может достигать нулевого значения при точном совпадении заданного направления на источник с направлением, присутствующем в опорном массиве. В данной задаче шаг по заданному и шаг по отыскиваемому направлениям не совпадал, в связи с чем нулевое значение минимума не достигалось никогда.
Реально анализируемая точка фазового пространства попадает на «склон» воронки, и может оказаться так, что высота точки в воронке с абсолютным физическим минимумом окажется больше, чем высота точки в другой воронке, из-за случайного расположения точек. Это соображение важно в связи с тем, что прямой поиск правильного направления прихода требует значительного времени. Так, поиск направления вместе с графическим отображением результата в градациях серого по около 1 000 000 направлениям занимает примерно 30 с. То же самое без отображения занимает на разных компьютерах от 3,5 до 8 с.
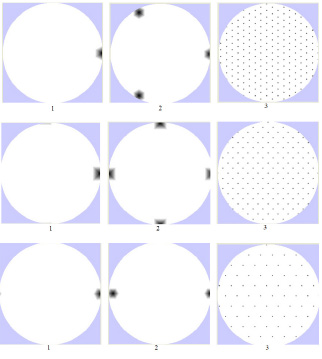
Рис. 2. Результат поиска направлений для разных антенн с количеством элементов N и диаметром D (mm): 1. N = 3, D = 7; 2. N = 3, D = 8; 3. N = 3, D = 100; 4. N = 4, D = 9; 5. N = 4, D = 104; 6. N = 4, D = 1004; 7. N = 6, D = 114; 8. N = 6, D = 124; 9. N = 6, D = 100
В этой связи, принимая во внимание тот факт, что для оценки устойчивости работы антенны требуется статистический анализ процесса по большому числу реализаций, был применен метод двухступенчатого расчета, позволивший сократить необходимое на одну реализацию время до 300 мс. Смысл метода состоит в том, что расчет опорных массивов по формуле (4) производится в интервале для X и Y от -500 до 500, а вычисление реакции по формуле (6) производится по этим массивам двуступенчато, с прореживанием, сначала в диапазоне от -150 до 150 (с сохранением физических величин проекций), а затем, в окрестности анализируемой точки, по полному массиву. Это приводит к тому, что на первом этапе вычисления увеличивается вероятность (по сравнению с полным прямым вычислением) попасть в воронку не с абсолютным минимумом, при этом последующее уточнение исправить эту ошибку не сможет. Для семиэлементной антенны было установлено, что такого рода ошибок при полном прямом вычислении не возникает для отношения диаметра антенны в длине волны вплоть до 50. При двухступенчатом вычислении допустимый размер антенны ограничен величиной 380 мм при той же длине волны.
Учитывая тот факт, что верхняя граничная частота акустического сигнала, обеспечивающая дальность действия 2 км, будет выбрана в пределах порядка 40 кГц, эффективный размер соответствующей антенны составит не менее 70 см, а реальный – еще больше, количество приемников, равное 7, представляется вполне достаточным.
Существует дополнительная возможность увеличения надежности обнаружения направления в шумах. Она состоит в использовании посылок от маяка-ответчика на двух разных частотах. Дело в том, что положение главной воронки в фазовом пространстве одинаково для всех частот (при правильном ее обнаружении), положение же вторичных воронок меняется в зависимости от частоты звука. Если в выражении (6) суммирование производится не только по парам приемников, но и по частотам, для которых в соответствии с выражением (4) заранее рассчитаны базовые массивы, отношение глубины минимума главной воронки к глубине вторичных увеличивается. Результат применения двухчастотного метода представлен на рис. 3, демонстрирующем его очевидную эффективность. Даже в том случае, когда одночастотный метод дает многочисленные вторичные воронки равной глубины с основной, двухчастотный метод позволяет получить однозначное правильное определение направления.
Применительно к семиэлементной антенне, когда воронки равной глубины и так отсутствуют, двухчастотный метод приводит к увеличению устойчивости антенны в условиях воздействия шума, поскольку углубляет главную воронку по отношению к вторичным и тем самым эффективно расширяет ее. Пример представлен на рис. 4.
Анализ свойств антенн производился статистическим методом. Для этого программным образом имитировалось добавление к модельному сигналу по выражению (5) случайной величины с задаваемым коэффициентом. В качестве источника шума использовалась стандартная функция random, которая выдает некоррелированное с предыдущим случайное действительное число в интервале (0..1). К синусной и косинусной компонентам моделируемого сигнала прибавлялись величины  , где k – задаваемый программно коэффициент. Таким образом, при энергетическом суммировании, учитывая, что мощность random равна 1/3, получаем для оценки действующего шума величину стандартного отклонения
, где k – задаваемый программно коэффициент. Таким образом, при энергетическом суммировании, учитывая, что мощность random равна 1/3, получаем для оценки действующего шума величину стандартного отклонения  . При моделировании воздействия шума на антенну также использовалась случайная добавка к фазе в выражении (5), равномерно распределенная на интервале -π .. π. Направление падения звуковой волны на плоскость антенны задавалось автоматически с использованием случайных проекций на оси фазового пространства.
. При моделировании воздействия шума на антенну также использовалась случайная добавка к фазе в выражении (5), равномерно распределенная на интервале -π .. π. Направление падения звуковой волны на плоскость антенны задавалось автоматически с использованием случайных проекций на оси фазового пространства.
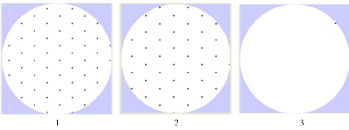
Рис. 3. Результат поиска направления для антенны из 3 элементов. Диаметр антенны 50 мм, 1 – частота 75 кГц, 2 – частота 67 Гц, 3 – суммирование по двум частотам
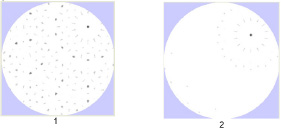
Рис. 4. Результат поиска направления для антенны из 7 элементов. Диаметр антенны 200 мм, 1 – частота 75 кГц, 2 – суммирование по частотам 75 и 70 кГц
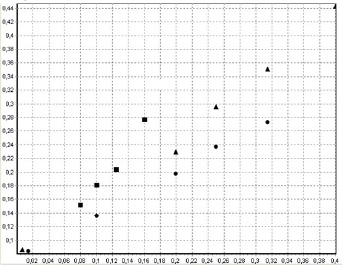
Рис. 5. Результат статистического анализа семиэлементной антенны диаметром 200 мм. На частоте 75 кГц. Квадраты – одночастотный метод, круги – двухчастотный «звездой», треугольники – двухчастотный кольцом
Зависимость ошибки направления и вероятности большой ошибки от диаметра антенны при уровне шума -12 дБ снижает устойчивость
|
Диаметр антенны, мм |
200 |
300 |
400 |
500 |
|
Дисперсия направлений, градусы |
0,44 |
0,31 |
0,25 |
0,22 |
|
Вероятность большой ошибки |
1 % |
1,47 % |
2,7 % |
6,5 % |
Целью статистического анализа являлось выявление зависимости от амплитуды шума вероятности значительной ошибки (выход найденного направления за пределы главной воронки), а также стандартного отклонения найденного значения направления от заданного. Вычисление соответствующих величин производилось путем осреднения по 10000 реализаций. Равномерность покрытия фазового пространства контролировалась визуально путем последовательного вывода всех заданных направлений на соответствующее поле.
Результаты представлены на рис. 5. По оси абсцисс отложены значения коэффициента шума k, по оси ординат – стандартные отклонения найденных направлений от заданных в градусах, полученные по всем анализируемым направлениям. Правые границы графиков соответствуют такому уровню шума, при котором вероятность значительной ошибки (выход за пределы главной воронки) достигает 1 %. Очевидно, что двухчастотный метод значительно повышает устойчивость оценки направления. Использование пар, сформированных «звездой», повышает точность, но снижает устойчивость. Представляется целесообразным использование семиэлементной антенны с формированием пар приемников по кольцу. При этом для антенны диаметром 200 мм уровень шума, при котором вероятность значительной ошибки не превосходит 1 %, составляет  <0.25, то есть -12 дБ. Увеличение диаметра антенны приводит к повышению точности определения направления, но в то же время значительных отклонений для двухчастотного метода в зависимости от диаметра антенны.
<0.25, то есть -12 дБ. Увеличение диаметра антенны приводит к повышению точности определения направления, но в то же время значительных отклонений для двухчастотного метода в зависимости от диаметра антенны.
В таблице приведены результаты измерения дисперсии найденных направлений и вероятность значительных отклонений для двухчастотного метода в зависимости от диаметра антенны.
Что предпочтительней – точность или устойчивость к шуму – зависит от философии разработки. Следует отметить, что реально на точность и вероятность ошибки влияет отношение диаметра антенны к длине волны звука, так что если полоса приемников и излучателей достаточно широкая, можно оперативно оптимизировать соотношение точности и надежности в соответствии с текущими условиями работы.
Результаты исследования и их обсуждение
1. Предложен новый метод определения направления прихода акустического сигнала методом УКБ, не требующий определения полной разности фаз между приемниками, разнесенными на расстояние больше половины длины волны звука. Метод основан на выборе направления из заданного набора заранее определенных возможностей. Критерием выбора является величина отклика антенны на сигнал в условиях достаточного отношения сигнал/шум. Оптимальным направлением является такое, которое обеспечивает минимум отклика.
2. Предложен способ повышения надежности оценки направления в условиях окружающих шумов путем использования двух или более частот.
3. Методом численного моделирования подтверждена целесообразность использования антенны, состоящей из семи одинаковых приемников, расположенных на плоскости в вершинах правильного многоугольника.
4. Найдена связь между размером антенны и длиной волны звука, позволяющая оптимизировать соотношение точности и помехоустойчивости приема.
Заключение
Представленные материалы подтверждают, что предложенный метод определения направления прихода звуковой волны может быть использован в условиях, когда форма волны близка к плоской. Преимуществом метода является то, что он дает однозначный результат по фиксированному алгоритму, без решения уравнений и т.д.
Работа выполнена в рамках государственных заданий (темы № 0128-2021-0010, при поддержке РФФИ (проект № 20-05-00384 «A»).
Библиографическая ссылка
Носов А.В., Орлов А.Г., Мурашов А.С., Тихонова Н.Ф. ИСПОЛЬЗОВАНИЕ АНТЕННЫ С УЛЬТРАКОРОТКОЙ БАЗОЙ БЕЗ ОПРЕДЕЛЕНИЯ ПОЛНЫХ ФАЗ // Международный журнал прикладных и фундаментальных исследований. 2022. № 1. С. 56-63;URL: https://applied-research.ru/en/article/view?id=13346 (дата обращения: 25.06.2026).
DOI: https://doi.org/10.17513/mjpfi.13346