
Scientific journal
International Journal of Applied and fundamental research
ISSN 1996-3955
ИФ РИНЦ = 0,556
TECHNICAL MEANS OF CONTROL OF IMMERSION IN THE OCEAN.

Идея применения пингеров для контроля отстояния от дна погружаемых приборов в океане появилась несколько десятков лет назад [1]. Смысл состоит в использовании автономных приборов [2–4] вне зависимости от ресурсов собственно исследовательского оборудования. Пингер, периодически излучая акустические сигналы, обеспечивает прием на судне-носителе двух изображений: следа от прямого сигнала, прямо поступающего от излучателя к приемнику, размещенному возле поверхности, и следа от переизлученного дном. По мере погружения прибора прямой сигнал удаляется от поверхности, а отраженный приближается к ней. Характер процесса определяется свойствами дна. В некоторых районах океана отраженный сигнал виден сразу, когда пингер еще практически не погрузился, в других появляется, когда пингер уже вблизи дна. Поскольку период следования сигналов пингера, как правило, составляет одну секунду, а время прохождения звукового сигнала от дна до поверхности составляет несколько секунд, возникают пересечения следов прямого и отраженного сигналов. Когда пингер находится в сотнях и десятках метров от дна, отраженный сигнал расплывается из-за обратного рассеяния от подслоев в толще осадков либо от границы раздела вода – грунт [5, 6]. Однако такое же явление можно наблюдать и при значительном удалении прибора от дна. В этой связи весьма важно обеспечить высокое качество отображаемой информации и дополнительный контроль глубины места по данным эхолота, в противном случае вероятно касание прибора дна и его повреждение.
Целью работы является разработка, испытание и практическое использование оборудования, изготовленного в соответствии с современными требованиями и на основе актуального уровня развития техники, с минимальными затратами материальных ресурсов. В случае успеха предполагается создание комплекса технических средств, обеспечивающих в дальнейшем пополнение имеющегося судового оборудования научно-исследовательских судов при улучшении качества работ, а также оснащение необорудованных специальным оборудованием судов для обеспечения возможности проведения с их борта океанологических работ.
Материалы и методы исследования
В распоряжении авторов была возможность изготовления бортового и погружаемого оборудования, а также проведения их испытаний и использования в ходе практических работ на НИС РАН и других плавследствах. Для контроля положения оборудования относительно дна описанным выше способом необходимы как минимум четыре составляющих. Это собственно пингер, судовой приемник акустических сигналов, устройство предварительной обработки и синхронизации, а также стандартный компьютер с соответствующим математическим обеспечением. В настоящее время автономный приемник звука находится в стадии разработки, поэтому в данной работе приводятся данные о достигнутых результатах, касающихся только пингера, синхронизатора и программы.
Пингер выполнен по раздельной схеме – корпус с электроникой соединен с излучателем гибким кабелем. Это облегчает изготовление, герметизацию и повышает надежность при погружении. Общий вид пингера в сборе представлен на рис. 1.
Тормоз служит для прекращения излучения звука в интервалах между забортными работами, без нарушения герметизации прочного корпуса, путем переключения геркона внутри. Излучение возобновляется автоматически после удаления тормоза. Представляется заслуживающим внимания оснащение крышки специальной втулкой 6, используемой в качестве силового элемента при вскрывании прочного корпуса без риска повреждения критичных для гереметизации поверхностей корпуса и крышки.
Основные технические параметры пингера приведены в таблице.

Рис. 1. 1 – прочный корпус с электроникой и источником питания, 2 – излучатель пьезокерамический столбчатый, 3 – тормоз (магнит с фиксатором), 4 – тросовые зажимы, 5 – крышка прочного корпуса до заливки, 6 – втулка для открывания, 7 – синхронизатор
Технические характеристики пингера
|
Несущая частота излучаемых сигналов |
12 кГц |
|
Длительность посылок |
2, 1 и 0,5 мс |
|
Период следования |
1, 2 с |
|
Мощность излучения в импульсе |
0.5 кВт |
|
Источник питания аккумулятор |
Li-Po |
|
Зарядное устройство |
стандартное |
|
Емкость источника питания (по умолчанию) |
2.2 Ач |
|
Номинальное напряжение источника питания |
11.1 В |
|
Продолжительность работы без подзарядки примерно (может варьироваться от 17 до 30 ч при длительности 2 мс) |
20 ч |
|
Пингер опрессован до |
630 атм |
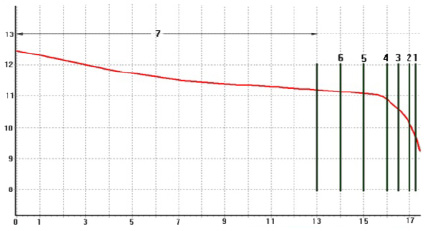
Рис. 2. Временная зависимость остаточного напряжения на батарее. Времена изменения количества щелчков согласно плану
При каждом включении пингера производится автоматическое измерение остаточного напряжения на батарее. Результат сообщается оператору посредством серии щелчков, по количеству которых можно принять решение, требуется ли подзарядка или прибор готов к использованию.
На рис. 2 представлен график зависимости напряжения батареи от времени в режиме непрерывного излучения (красная линия). По вертикальной оси отложено напряжение в вольтах, по горизонтальной – время в часах. Кривая получена для батареи емкостью 2,2 Ач и при длительности посылок 2 мс и интервале следования 1 с. Вертикальными отрезками обозначены моменты изменения количества щелчков перед началом рабочего цикла излучения (теоретически согласно проекту). Из рис. 2 ясно, что после того, как количество щелчков становится меньше 7, допустимое время полной работы не может превышать 4,5 ч во избежание повреждения батареи [7]. При использовании батарей большей емкости и посылок меньшей длительности время работы пингера с одной зарядки практически пропорционально увеличивается.
Синхронизатор предназначен для приема предварительной аналоговой и цифровой обработки и передачи в компьютер сигналов, поступающих от пингера через доступные приемные акустические системы. Структура системы приема в виде микроконтроллерного устройства, соединенного с компьютером посредством стандартного интерфейса (RS232) показала свою эффективность и обеспечила практическую независимость от типа компьютера. Прибор производит синхронизацию циклов приема с циклами излучения пингера, ввод сигналов через усилитель и аттенюатор, их оцифровку со скоростью 120 кГц, узкополосную цифровую фильтрацию с выделением квадратур, вычисление амплитуды и передачу данных в компьютер. По умолчанию устройство настроено на частоту приема 12 кГц, при использовании других частот возможна оперативная перенастройка. Полоса фильтрации согласуется с длительностью посылок пингера. Длительность времени приема может составлять 1; 0,5 или 0,25 с и определяется компьютерной программой, управляющей работой синхронизатора. Уменьшение времени приема позволяет увеличивать эквивалентное пространственное разрешение. Объем собираемой информации вне зависимости от времени приема составляет 500 отсчетов. Синхронизатор позволяет усиливать сигналы в диапазоне от 0 до 50 дБ и использовать аттеньюатор и на 20 дБ. Синхронизатор изготовлен на основе микроконтроллера STM 32.
Другой неотъемлемой частью аппаратуры для контроля погружения приборов является компьютерная программа, отображающая состояние процесса, на основании анализа которого оператор принимает решение о дальнейших действиях. На рис. 3 представлена первая (из трех) страница программы. Визуально программа подобна монитору типичных эхолотов – черно-белое изображение, развертка от правого края к левому, настройка яркости, сдвиг вверх или вниз и т.д. Каждая вертикальная линия изображения отображает амплитуду принятого сигнала, закодированную градациями серого. Всего 256 градаций, белый цвет соответствует нулевой амплитуде, черный – амплитуде 256 условных единиц. Сама амплитуда не имеет значения, главное – чтобы оператор выделял прямой и отраженный дном сигналы и тем самым контролировал дистанцию от погружаемого прибора до дна. Программа имеет средства настройки синхронизации периода повторений циклов ввода с моментами излучения пингера. Настройка производится в лабораторных условиях, без затрат судового времени. На рис. 3 виден след сигнала пингера, который имеет тенденцию к удалению от верхней границы изображения, то есть период ввода удаляется по времени от момента излучения. Калибровка состоит в том, чтобы добиться строго горизонтального следа сигнала. Точность настройки периода повторения начала ввода сигналов составляет 1 мкс.
Программа обеспечивает дополнительные сервисные функции – представление сигналов в виде обычных осциллограмм, регистрация и воспроизведение записанного, постановка меток и др. Полезным оказалось дополнительное представление данных за многократно увеличенное время, что облегчает оператору учет пересечений прямого и отраженного сигналов для надежного выделения момента приближения погружаемого прибора ко дну.
Результаты исследования и их обсуждение
Как было отмечено выше, описанное оборудование использовалось в течение более 10 лет на различных научных и производственных судах. Пользователями отмечалось, что оно не только обеспечивает надежный контроль погружения, но и повышенное качество по сравнению с штатным судовым оборудованием. Пример для сравнения качества записи новым и штатным оборудованием приведен на рис. 4. Преимущество нового оборудования представляется очевидным, особенно если учесть то обстоятельство, что монитор с информацией не привязан к конкретному месту на судне и может быть использован даже по необходимости непосредственно оператором лебедки.
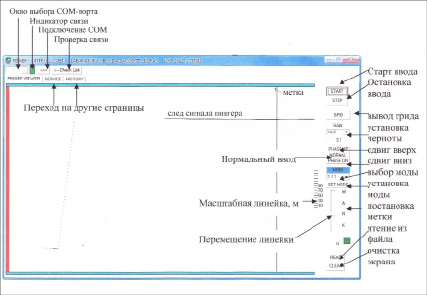
Рис. 3. Главная страница, отображение сигналов пингера
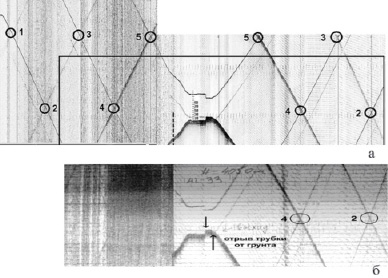
Рис. 4. а) скриншот экрана системы регистрации и визуализации; б) фрагмент записи на термобумаге судового регистратора LAZ-4700
Заключение
Авторы полагают, что результаты многолетнего использования вновь разработанного оборудования показал не только возможность его применения при морских работах, но также его определенное преимущество перед штатными судовыми системами, с учетом того, что на большинстве отечественных судов они давно не обновлялись.
Работа выполнена в рамках тем госзадания № 0128-2021-0010, № 0128-2021-0017, при поддержке грантов РФФИ: № 20-05-00384, № 20-08-00246.
Библиографическая ссылка
Носов А.В., Демидова Т.А., Тихонова Н.Ф. ТЕХНИЧЕСКИЕ СРЕДСТВА КОНТРОЛЯ ПОГРУЖЕНИЯ ПРИБОРОВ В ОКЕАНЕ // Международный журнал прикладных и фундаментальных исследований. 2022. № 2. С. 28-32;URL: https://applied-research.ru/en/article/view?id=13354 (дата обращения: 01.07.2026).
DOI: https://doi.org/10.17513/mjpfi.13354