
Scientific journal
International Journal of Applied and fundamental research
ISSN 1996-3955
ИФ РИНЦ = 0,556
MONITORING SYSTEM FOR DETECTION OF ABRUPT CHANGES IN BIO-ELECTRIC SIGNALS

Как известно, электрофизиологические сигналы несут в себе информацию, необходимую для идентификации состояния человека-оператора в реальном масштабе времени [1, 2]. Структурные методы анализа квазипериодических сигналов как содержательные методы способствуют распознаванию и обнаружению резких изменений биомедицинских сигналов.
Для проектирования диалоговой системы, позволяющей идентифицировать резкие изменения по электрофизиологическим данным, требуется решение следующих основных задач:
− Выбор математических методов определения нелинейных динамических характеристик, соответствующих психофизиологическому состоянию человека-оператора.
− Разработка алгоритмов, выделяющих информативные события структурных элементов квазипериодических сигналов в реальном масштабе времени.
− Обеспечение проведения исследований в диалоговом режиме.
− Возможность применения к различным типам электрофизиологических сигналов.
− Разработка адекватной микропроцессорной системы, обеспечивающей многозадачность.
Распознавание резких изменений требует создания системы реального времени. Многие электрофизиологические сигналы имеют квазипериодический характер. К числу таких сигналов можно отнести ЭКГ, ФПГ, Кривые дыхания и т.д.
Целью исследования является разработка мониторинговой системы для обнаружения резких изменений в функциональной деятельности человека-оператора по квазипериодическим электрофизиологическим сигналам.
Материалы и методы исследования
Предложенная мониторинговая система, основанная на фаза-плоском методе, реализуется на вычислительной системе, спроектированной на основе сети микроконтроллеров.
Задачей данной мониторинговой системы является слежение за фаза-плоской картиной. Сутью данной методики является отображение на мониторинге суперпозиционной картины каждого цикла [3, 4].
Суть метода состоит в переходе от последовательности v1, v2, v3, … значений сигнала z(t), который с шагом квантования ∆ наблюдается в дискретные моменты времени tk ≡ k∆, к последовательности G-мерных векторов

лежащих на фазовой траектории в G-мерном пространстве, где τ – временная задержка (лаг преобразования), а G – размерность вложения (embedding dimension).
В некоторых случаях для реконструкции аттрактора достаточно ограничиться размерностью вложения G = 2. Тогда траектория v(t) отображается на фазовой плоскости с координатами v(t), v(t – τ).
Для построения фазового портрета ЭКГ в явном виде используются скоростные показатели сердечной деятельности, другими словами, строить фазовый портрет ЭКГ не в координатах v(t), v(t – τ), а координатах v(t), v(t) v̇(t), где v̇(t) – скорость изменения сигнала в момент времени t.
Отображение ЭКГ в координатах v(t), v̇(t) можно пояснить как метод исследования динамической системы, состояние которой описывается двумя дифференциальными уравнениями

 ,
,
где х1 = v(t) – выходная координата системы, в данном случае – амплитуда ЭКГ, х2 = v̇(t) – ее первая производная, а F(x1, x2) – некоторая нелинейная функция.
Разделив эти уравнения, получим
 ,
,
решение которого
х2 = Ψ(x1)
с учетом обозначений х1 = v(t) и х2 = v̇(t) можно представить в виде зависимости
v̇(t) = Ψ(v(t)),
определяющей фазовую траекторию на плоскости v(t), v̇(t) .
Поскольку неизвестны аналитические выражения функций v(t) и F(x1, x2), для построения фазовой траектории не остается ничего иного, как использовать наблюдение v(t) и оценить производную v̇(t) численным методом (рис. 1).
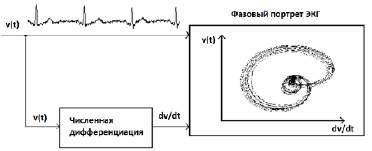
Рис. 1. Фаза-плоский метод анализа квазипериодических сигналов
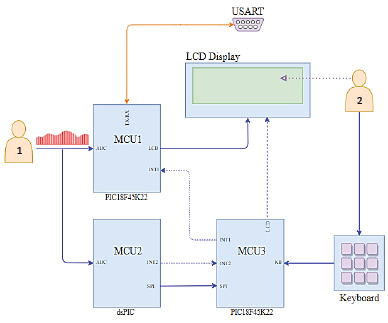
Рис. 2. Структурно-функциональная схема мониторинговой системы «MS_AC» 1 – человек-оператор, 2 – ответственное лицо (инструктор, психолог и т.д.). MCU1, MCU2, MCU3 – микроконтроллеры, Keyboard – матричная клавиатура размерности 3х4, LCD Display – графический цветной дисплей разрешением 320х240, USART – интерфейс последовательной передачи данных на ПК для последующей вторичной обработки
Данная система может быть применена к различным типам квазипериодических сигналов, таких как ФПГ, ЭКГ и др. На рис. 2 представлена структурно-функциональная схема мониторинговой системы «MS_AC» в виде сети микроконтроллеров [5–7]. Как видно из рисунка, система имеет три уровня иерархии.
Структурная организация сети микроконтроллеров отображает функциональную иерархию целевой задачи данной системы.
На первом уровне выполняются следующие функции:
Ввод и преобразование электрофизиологического сигнала, построение суперпози-ционной картины – фаза-плоской картины для последующего отображения ее на ЖК-дисплее. Реализация данной функции выполняется микроконтроллером MCU1 – PIC18F45K22.
Измеряемый сигнал подается на вход ADC аналого-цифрового преобразователя микроконтроллера. Задачей этого микроконтроллера является вывод измеренного сигнала на LCD дисплей (через шину LCD) и передача его по последовательному порту RX-TX на ПК. Данный микроконтроллер большой вычислительной нагрузки не несет.
Второй уровень выполняет функцию контроля над потоком для обнаружения резких изменений. Основную вычислительную нагрузку берет на себя микроконтроллер MCU2, выполняющий цифровую обработку для выявления резких изменений. В качестве данного микроконтроллера может быть выбран микроконтроллер из серии специализированных микроконтроллеров цифровой обработки dsPIC. В нашем случае был использован микроконтроллер dsPIC30F4013. Данный микроконтроллер также играет роль интеллектуального датчика. В зависимости от типа анализируемых электрофизиологических данных в адаптивном режиме определяются пороговые значения вводимого сигнала, а также генерация калибровочного сигнала.
Данная система функционирует в двух режимах – как автоматическом, так и в интерактивном. В автоматическом режиме микроконтроллер MCU2, в зависимости от типа сигнала, от множественных критериев (количественной оценки динамических показателей), а также от пороговых значений электрофизиологических сигналов позволяет обнаружить резкие изменения рассматриваемых процессов.
Третий уровень предназначен для полного контроля информационных процессов, происходящих в первом и втором уровнях.
Микроконтроллер MCU3 выполняет функцию взаимодействия узлов, а также интерфейса с пользователем. Если микроконтроллер MCU2 обнаружит резкое изменение сигнала, то он подает сигнал прерывания INT2 на микроконтроллер INT3, который блокирует микроконтроллер MCU1 сигналом INT1 и берет вывод на дисплей на себя и отображает полученные по шине SPI от микроконтроллера MCU2. Данный микроконтроллер также может прервать работу микроконтроллера MCU1 сигналом INT1, когда пользователь меняет режим работы через матричную клавиатуру. В качестве микроконтроллера MCU3 был выбран PIC18F45K22. Также MCU3 позволяет обеспечить взаимодействие ответственного человека с системой. В данной системе имеется возможность прервать процесс обработки и определения статистических параметров амплитуд и первой производной сигнала для обнаружения характера изменения динамических показателей.
Результаты исследования и их обсуждение
Представленная мониторинговая система со своей гибкостью позволяет использовать различные типы квазипериодических электрофизиологических сигналов. При этом исследователям необходимо адаптировать систему к типу рассматриваемого сигнала.
Для адаптации необходимо выполнение следующих этапов:
1. Инициализация системы: выбор канала, выбор диапазона частот сигнала, выбор коэффициентов масштабирования по X и Y дисплея.
2. Настройка калибровочных данных: установка амплитудно-временных и частотных характеристик по типам рассматриваемых психофизиологических сигналов.
3. Ввод нормативных данных: определение пороговых значений на основе экспертных данных.
4. При необходимости переустановка метаданных системы.
Сохранение динамических характеристик сигнала и передача их на расположенный на дистанции ПК может использоваться для формирования обобщенного психофизиологического портрета.
Данную систему можно использовать для следующих целей:
− Выдачи допуска к работе, так и для слежения за работоспособностью человека-оператора (обнаружение усталости, тревожности и т.д.).
− Для тестирования функциональной адаптации в экстремальных ситуациях.
− Для профессионального отбора операторов (прием на работу).
Библиографическая ссылка
Дадашев Ф.Г., Аллахвердиев А.Р., Ахадов Я.А., Дадашева К.Г., Алигумбатов Ф.Ф. СИСТЕМА МОНИТОРИНГА ДЛЯ ОБНАРУЖЕНИЯ РЕЗКИХ ИЗМЕНЕНИЙ КВАЗИПЕРИОДИЧЕСКИХ БИОМЕДИЦИНСКИХ СИГНАЛОВ // Международный журнал прикладных и фундаментальных исследований. 2022. № 5. С. 7-10;URL: https://applied-research.ru/en/article/view?id=13379 (дата обращения: 01.07.2026).
DOI: https://doi.org/10.17513/mjpfi.13379