
Scientific journal
International Journal of Applied and fundamental research
ISSN 1996-3955
ИФ РИНЦ = 0,556
RESEARCH AND DEVELOPMENT OF UNDERWATER NAVIGATION SYSTEMS FOR REMOTE-CONTROLLED VEHICLES

Перечень условных сокращений
БИНС – Бесплатформенная инерциальная навигационная система
ГАНС – Гидроакустическая навигационная система
ТНПА – Телеуправляемый необитаемый подводный аппарат
ИНС – Инерциальная навигационная система
ДУС – Датчик угловых скоростей
В данной статье рассмотрены вопросы ориентации ТНПА в водной среде. Для эффективной работы ТНПА [1] необходимо использование гидроакустических систем позиционирования, позволяющих определять текущие координаты и передавать их на монитор оператора. Поскольку, как известно, GPS в воде не работает, но зато хорошо работает гидроакустическая аппаратура: гидрофоны, эхолоты, сонары, звуковизоры, маяки-ответчики и т.д. В них используются сигналы звукового и ультразвукового диапазона частот. В статье рассматриваются технологии подводной ориентации средствами гидроакустики и управления движением на основе этих данных.
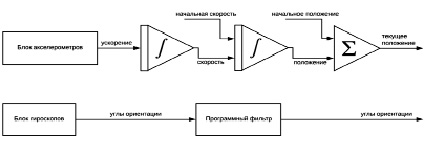
Рис. 1. Структурная схема инерциальной навигационной системы
Рассмотрены также подсистемы телекоммуникации, сбора, обработки данных с датчиков и визуализации данных телеметрии на экране монитора, а также системы технического зрения, адаптивного счисления пути.
Сами авторы статьи – опытные разработчики отечественных малогабаритных ТНПА легкого класса (вес до 30 кг). Ими накоплен большой опыт разработок и эксплуатации ТНПА в разных видах работ. Далее рассмотрен ряд разработок, позволяющих усовершенствовать существующие ТНПА и повысить эффективность работ с ними.
В ходе работ были созданы соответствующие аппаратные и программные модули. Реализованы функции, позволяющие производить независимую настройку отдельных компонент системы [2].
Разработаны аппаратные и программные части модуля технического зрения.
Выбраны требуемые параметры бортового микрокомпьютера, произведена организация интерфейса между видеокамерой, бортовым вычислителем, береговой станцией и платформой ТНПА. Произведена первичная настройка микрокомпьютера платформы ТНПА.
Разработан алгоритм счисления пути на базе системы технического зрения. Алгоритм реализует предварительную обработку изображения, выделение и кластеризацию объектов.
В процессе работы был реализован интерфейс платформы с акустическими датчиками и алгоритмами автоматического и полуавтоматического (директивного) движения в заданную точку. Алгоритмы автоматического обхода препятствий, включающие в себя логику построения оптимальной траектории.
Повышение эффективности подводных работ за счет использования последних разработок ведущих фирм в области гидроакустических систем и бортовых инерциальных систем подводной навигации. Установка и интеграция сенсоров в информационно-управляющую систему ТНПА.
Аппаратная интеграция.
Бесплатформенные инерциальные навигационные системы нашли широкое применение в подводной робототехнике [3]. По сравнению с другими инерциальными навигационными системами БИНС обладают следующими преимуществами:
− универсальность;
− меньшие стоимость, размеры, масса;
− простота в использовании и интеграции в систему.
В отличие от платформенной ИНС, БИНС не имеет в составе гиростабилизирующей платформы для выставления вертикали места и стабилизации своих датчиков. Отсутствие такого дорогостоящего и технически сложного устройства сказалось на повышении надежности, уменьшении времени интеграции в систему и, конечно же, на уменьшении стоимости.
Типовая схема ИНС представляет собой блок ДУС, блок акселерометров, набор интеграторов и сумматоров. Структурная схема изображена на рис. 1. Данная схема имеет ряд существенных недостатков, основной из которых – дрейф показаний датчиков и, как следствие, постепенное накопление ошибки определения положения [4]. При работе не в воде данная ошибка нивелируется наличием данных с GPS-модуля. При разработке системы ориентации комплекса ставилась задача минимизировать или исключить накопление данной ошибки и добиться длительной стабильной работы ИНС.
Материалы и методы исследования
В ходе анализа вышеперечисленных проблем и методов их решения был выявлен перечень изменений в структуре системы, определяющий ее конечный состав. Главными проблемами являются дрейф нулевой точки ДУСов и высокий уровень зашумленности данных акселерометров, приводящие со временем к неточным выходным данным. Как следствие, может возникнуть ошибка определения положения горизонта, при котором вертикальные перемещения могут стать причиной изменения показаний координат в других осях из-за паразитной составляющей силы, направленной вдоль перпендикулярных осей чувствительности датчиков. Помимо этого инерциальные датчики не позволяют определить ориентацию относительно магнитных полюсов планеты. Для решения этой задачи необходимо добавить в систему трехосевой магнитометр. Комплексирование данных с магнитометра и ДУСов позволяет компенсировать накапливающуюся ошибку из-за дрейфа нуля и определить угол курса с достаточной достоверностью.
Для получения информации об ориентации ТНПА в пространстве, а также для получения данных, используемых в блоке инерциального счисления пути, был выбран модуль БИНС MTi-600 фирмы X-sense (Нидерланды). Надо отметить, что эти модули изначально предназначались для воздушных беспилотников. В состав данной БИНС входят трехосевые ДУС, акселерометр и магнитометр, а также вычислительный блок. Использование готовой БИНС позволило распределить вычислительные нагрузки. Архитектура модуля MTi-600 представлена на рис. 2.
Данный модуль содержит несколько интерфейсов связи: CAN, RS232, UART.
− CAN (Controller Area Network)
− Сеть контроллеров (CAN-шина) – это надежный стандарт, предназначенный для обеспечения связи между устройствами в приложениях без главного компьютера. Интерфейс CAN MTi-600 не имеет согласующего резистора. Его можно использовать в шине CAN, которая уже имеет требуемую оконечную нагрузку. Если используется соединение с одним устройством, между выводами CAN_H и CAN_L необходимо добавить оконечный резистор 120 Ом.
− RS232 с управлением потоком RTS/CTS
− Интерфейс RS232 соответствует стандартным уровням напряжения RS232. Он включает аппаратное управление потоком через линии RTS и CTS.
− UART
Интерфейс UART можно использовать для прямого подключения к MCU с уровнями ввода-вывода 3,3 В. Пользователь может настроить модуль MTi серии 600 для связи через UART. Конфигурация кадра UART – 8 бит данных, без контроля четности и 1 стоповый бит (8N1). Протокол UART имеет только линии TX и RX без какого-либо управления потоком.
Для сопряжения с информационно-управляющей системой ТНПА используется интерфейс UART. Применение данного интерфейса обусловлено наличием свободных периферийных модулей бортового вычислителя ТНПА. По сравнению с RS-232 UART не требует использования преобразователей уровней сигналов, что позволило сохранить ранее отработанные схемотехнические решения. Также данный интерфейс является самым быстрым. В табл. 1 представлены диапазоны скоростей обмена модуля MTi-600.
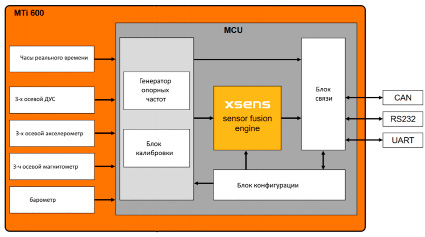
Рис. 2. Архитектура модуля MTi-600
Таблица 1
Скорость обмена данными с модулем
|
Интерфейс |
Мин |
Макс |
Единица измерения |
|
CAN |
10.0 |
1000 |
кбит/с |
|
RS232 |
4.8 |
1000 |
кбит/с |
|
UART |
4.8 |
2000 |
кбит/с |
Обмен с модулем происходит на скорости 2 Мбит/с. Данные, полученные от модуля, используются в системе стабилизации курса управляющей системы ТНПА, а также по каналу передачи телеметрии поступают в береговую станцию, для отображения на мониторе оператора, а также для дальнейшей передачи в платформу ТНПА. Для обмена данными с модулем MTi-600 используется протокол XBus.
Для установки на ТНПА выбрана гидроакустическая навигационная система Evologics S2C 18/34. Основные характеристики представлены в табл. 2, внешний вид – на рис. 3.
Таблица 2
Основные характеристики гидроакустической системы Evologics S2C 18/34
|
Наименование |
Описание |
Основные характеристики |
|
Evologics S2C 18/34 |
ГАНС УКБ |
Всенаправленный модем Дальность связи до 3,5 км Частота коммуникаций 18–34 кГц Скорость: до 13,9 кбод/с Интерфейс подключения: Ethernet или RS-232 Максимальная мощность при передаче: 65 Вт, номинальная 35 Вт Питание 24 В Габариты: 11x18x27 см Вес: 2 кг |

Рис. 3. Внешний вид модема Evologics S2C 18/34
Гидроакустический модем работает в режиме маяка-ответчика и не требует интерфейсного подключения к ТНПА. Информация с наземной станции ГАНС напрямую поступает в береговую станцию ТНПА. Далее по интерфейсу связи передается в управляющую платформу ТНПА. Программное обеспечение разработано на языке программирования C++. В программном обеспечении платформы ТНПА предусмотрены следующие режимы автоматического движения ТНПА: движение в толще воды; движение по траектории вдоль поверхности дна; движение вдоль произвольной поверхности
Движение в толще воды предполагает отсутствие визуальных данных, используемых системой технического зрения в системе счисления пути, отсутствие препятствий. В общем случае ТНПА перемещается по прямолинейной траектории заданной двумя точками. Схема движения представлена на рис. 4. В данном режиме в системе счисления пути используются только данные с БИНС и гидроакустического оборудования, установленных на ТНПА.
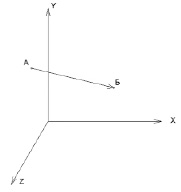
Рис. 4. Схема движения ТНПА
Для решения задачи перемещения ТНПА из точки А в точку Б в автоматическом режиме декомпозируем данную задачу на следующие составляющие: определение необходимого направления (задание курса), расчет скорости горизонтального движения, расчет скорости вертикального движения.
По данным ГАНС [5] определяются координаты точки А. Далее определяется время, необходимое для перемещения (формула (1)), исходя из заданной скорости, ограниченной периодом обновления текущей координаты и ограничениями датчиков. Далее рассчитываются вертикальная и горизонтальная скорости по формуле (2):
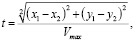 (1)
(1)
 . (2)
. (2)
Следующим шагом, используя заданные координаты точки Б, рассчитывается направление на точку Б из точки А по формуле
 (3)
(3)
Задания скорости и направления движения рассчитываются при каждом обновлении данных координатной системы счисления пути. Движение по траектории вдоль поверхности дна. Траектория движения задается набором путевых точек и скоростью движения между точками. Движение между двумя последовательными точками описано в предыдущем пункте.
Движение вдоль поверхности дна подразумевает наличие как гидроакустических, так и визуальных данных, а также возможное наличие препятствий. Данный режим предполагает движение параллельно поверхности дна с заданными отстоянием и скоростью, и автоматическим обходом препятствий по оптимальной траектории. Обход препятствий осуществляется с приоритетом сохранения отстояния от дна.
В таком режиме регуляторы обеспечивают движение аппарата с заданной маршевой скоростью относительно грунта Vз и с заданным отстоянием от дна hз, стабилизируя расчетный курс движения. Ошибка отстояния от дна hо рассчитывается как разница между заданным значением и средним измеренным значением. Диапазон допустимой ошибки задается оператором.
В нашем случае аппарат не имеет контуров управления углами крена и дифферента, следовательно, эти углы считаются нулевыми. Поэтому решаем задачу автоматического движения по траектории только вдоль вертикальной поверхности произвольной формы.
Данный режим позволяет двигаться по заданной траектории вдоль вертикальной поверхности произвольной формы с сохранением дистанции до оной. Для работы данного режима, так же как и для предыдущего, требуется наличие визуальных данных для работы системы счисления пути.
При такой схеме движения управляющая система Платформы ТНПА обеспечивает перемещение ТНПА от точки к точке с заданной скоростью по глубине (рис. 5), компенсирование бокового сноса, а также стабилизирует перпендикулярность продольной строительной оси x аппарата по данным эхолота и ГКО.
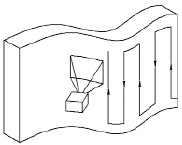
Рис. 5. Схема движения ТНПА
Обмен с модулем происходит на скорости 2 Мбит/с. Данные, полученные от модуля, используются в системе стабилизации курса управляющей системы ТНПА, а также по каналу передачи телеметрии поступают в береговую станцию, для отображения на мониторе оператора, а также для дальнейшей передачи в платформу ТНПА.
Программное сопряжение. Для обмена с модулем MTi-630 используется протокол XBus. Данный модуль содержит несколько интерфейсов связи: CAN, RS232, UART; CAN (Controller Area Network).
Сеть контроллеров (CAN-шина) – это надежный стандарт, предназначенный для обеспечения связи между устройствами в приложениях без главного компьютера. Интерфейс CAN MTi-600 не имеет согласующего резистора. Его можно использовать в шине CAN, которая уже имеет требуемую оконечную нагрузку. Если используется соединение с одним устройством, между выводами CAN_H и CAN_L необходимо добавить оконечный резистор 120 Ом.
− RS232 с управлением потоком RTS/CTS.
Интерфейс RS232 соответствует стандартным уровням напряжения RS232. Он включает аппаратное управление потоком через линии RTS и CTS.
− UART
Интерфейс UART можно использовать для прямого подключения к MCU с уровнями ввода-вывода 3,3 В. Пользователь может настроить модуль MTi серии 600 для связи через UART. Конфигурация кадра UART – 8 бит данных, без контроля четности и 1 стоповый бит (8N1). Протокол UART имеет только линии TX и RX без какого-либо управления потоком.
Для сопряжения с информационно-управляющей системой ТНПА используется интерфейс UART. Применение данного интерфейса обусловлено наличием свободных периферийных модулей бортового вычислителя ТНПА. По сравнению с RS-232 UART не требует использование преобразователей уровней сигналов, что позволило сохранить раннее отработанные схемотехнические решения. Также данный интерфейс является самым быстрым. В табл. 1 представлены диапазоны скоростей обмена модуля MTi-630.
Заключение
Проработаны интерфейсы платформы ТНПА с гидроакустическими и инерциальными сенсорами с учетом необходимой пропускной способности канала для обеспечения скоростей передачи данных [6]. Разработаны алгоритмы обработки и интерпретации данных принимаемых с гидроакустических и инерциальных сенсоров. Произведена интеграция сенсоров в информационно-управляющую систему ТНПА. Реализованы алгоритмы автоматического перемещения ТНПА из точки А в точку Б.
Кроме того, реализованы функции, позволяющие производить независимую настройку отдельных компонент системы.
Произведена разработка алгоритмов полуавтоматического и автоматического движения на базе систем счисления пути акустической навигационной системы. Алгоритмы обеспечивают автономное движение ТНПА между заданными точками с автоматическим обходом препятствий.
Для коммуникации между акустическими компонентами и платформой ТНПА в виде соответствующих наборов команд использован протокол Modbus, а также пользовательский интерфейс с графикой на мониторе.
Статья написана в рамках государственного задания ИО РАН по теме № FMWE-2021-0011.
Библиографическая ссылка
Розман Б.Я., Елкин А.В. ПРОЕКТИРОВАНИЕ СИСТЕМ ПОДВОДНОЙ НАВИГАЦИИ ТЕЛЕУПРАВЛЯЕМЫХ АППАРАТОВ // Международный журнал прикладных и фундаментальных исследований. 2022. № 11. С. 77-82;URL: https://applied-research.ru/en/article/view?id=13471 (дата обращения: 01.07.2026).
DOI: https://doi.org/10.17513/mjpfi.13471