

«Радикальный способ энергосбережения в электроприводе переход от нерегулируемого электропривода к регулируемому»: переход к широкому внедрению электромашиннопреобразовательных управляемых электромеханических систем. Именно эти системы потенциально способны экономить десятки процентов электроэнергии от ее общих затрат на реализацию технологических процессов. Естественно, применительно к асинхронному управляемому электроприводу необходимость производить оценку экономической эффективности при разработке мероприятий приводит к необходимости более точного и обоснованного определения основных характеристик асинхронных двигателей, в частности: уточнения механических и электромеханических характеристик АД.
В данной статье рассматривается построение
электромеханической характеристики АД зависимости потребляемого фазой двигателя тока
I1 от скольжения S (или скорости вращения ротора n) при неизменных фазных
напряжений U2 и частоте f 2, ![]() . Уточнение достигается за
счет построения характеристики не по Гобразной схеме замещения или Тобразной с
различными упрощающими предположениями, а по полной Тобразной схеме замещения
с последовательным контуром намагничивания и параметрами: r0, r1, r2
. Уточнение достигается за
счет построения характеристики не по Гобразной схеме замещения или Тобразной с
различными упрощающими предположениями, а по полной Тобразной схеме замещения
с последовательным контуром намагничивания и параметрами: r0, r1, r2
активными сопротивлениями; x0, x1, x2 индуктивными сопротивлениями (сопротивления r2, x2 приведены к обмотке ста тора двигателя).
Введем следующие обозначения сопротивлений схемы замещения АД (параметры ротора приведены к обмотке статора):
![]()
Ранее нами было показано, что момент на валу двигателя определяется выраже нием [1]:

Здесь Мн-номинальный момент, km-кратность максимального момента, Sk-критическое скольжение, λ-параметр. Критическое скольжение Sk и параметр λ определяются выражениями


Учитывая взаимосвязь между моментом (2) и током в обмотке ротора I2, приведен ным к обмотке статора

получаем:

Ток I1, потребляемый двигателем, может быть выражен через ток I2 и параллельно соединенные сопротивления Z0 и Z2 следующим образом:

Поэтому на основании правила ![]() (
(![]() -комплексно-сопряженное
значение тока
-комплексно-сопряженное
значение тока ![]() ) через выражение (5) находим:
) через выражение (5) находим:

или после преобразований:


Три любых известных значений тока при известных трех значениях скольжения S приводят к трем уравнениям относительно параметров d, e, f (10). Если же известны параметры схемы замещения, то тогда определение параметров (10) осуществляется непосредственно по формулам (10). Как правило каталожные данные содержат данные, позволяющие найти значения номинального I1 = I1M, S = Sн и пускового Ip=k1Iн, S=1 токов. В качестве третьего значения тока I1, целесообразно выбрать ток холостого хода I1 = I1x , S=0, поскольку он также либо может быть определен по каталожным данным, либо имеет достаточно приемлемые оценки. В результате из (9) получим три уравнения относительно коэффициентов d, е, f:
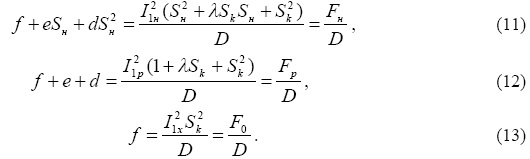
Система уравнений (11) (13) имеет единственное решение
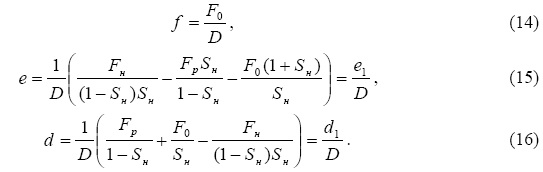
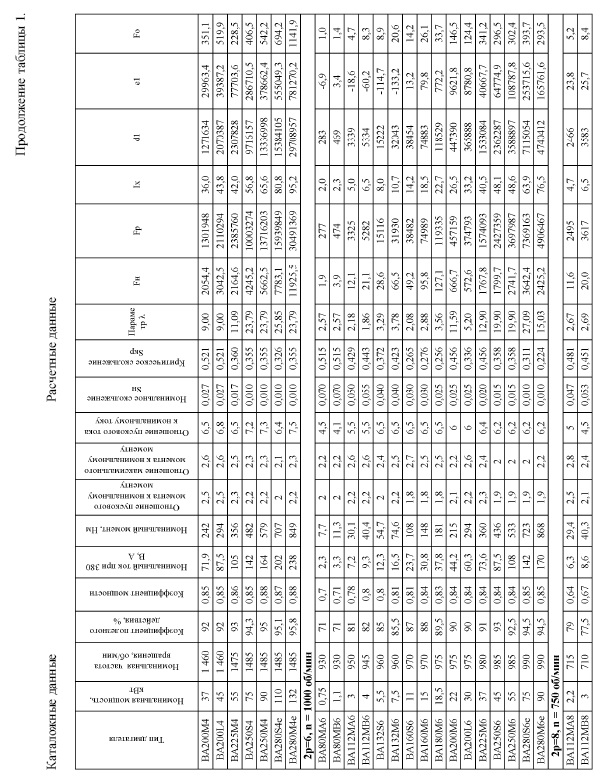
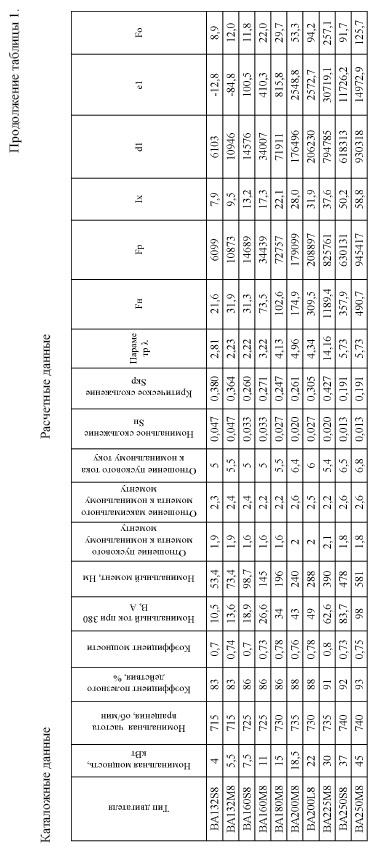
Таким образом, все коэффициенты и параметры уравнения (9) могут быть вы числены либо на основании известных параметров схемы замещения (1) в тех случаях, когда они определены расчетным или экспериментальным путем; либо на основании каталожных данных, непосредственно содержащихся в каталогах или полученных из них простым перерасчетом: Mн,Mр,I1р,I1н,I1х,Sн,U1,m1,p,f1. Окончательно электромеханическая характеристика АД получается из выражений (9), (14) (16) в следующем виде:

Типичный вид электромеханической характеристики для электрических двигателей различной мощности и габаритов приведен на рис. 1.
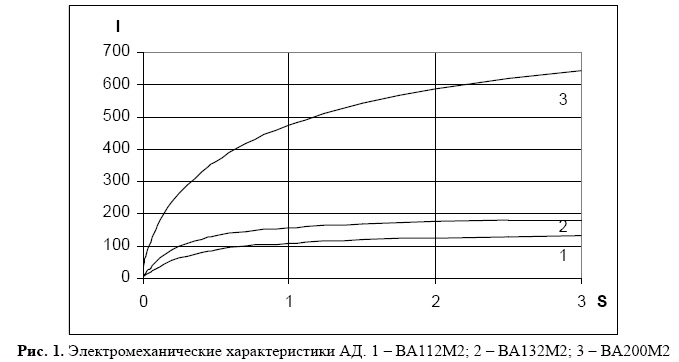
Выполненные расчеты представлены в табл.1.
В [1] было показано что, условием физической реализуемости выражения для механической характеристики является выполнение неравенства λ < 2 . Нетрудно заметить что, это же условие необходимо и для физической реализуемости выражения для тока I1.
Каталожные данные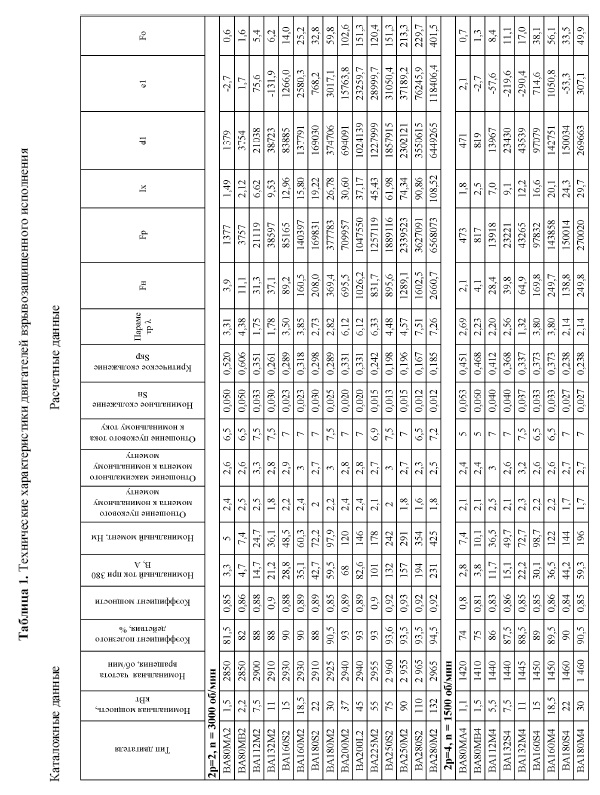
1. Ковалев Ю.З. Условие физической реализуемости математических моделей асинхронных двигателей// Международный журнал прикладных и фундаментальных исследований. 2009 № 4.
2. Ковалев А.Ю. Построение электротехнической характеристики асинхронного двигателя //Россия молодая: первые технологии в промышленность. Материалы II Всероссийской молодежной научнотехнической конференции 21 22 апреля. 2009. стр. 49.
3. Владимирский электромоторный завод. Технический каталог. РУСЭЛПРОМ. 4.2. www.vemp.ru.