
Scientific journal
International Journal of Applied and fundamental research
ISSN 1996-3955
ИФ РИНЦ = 0,556
RESEARCH BILINEAR SYSTEMS USING A STABILIZING CONTROL

Известно, что структура различных иммунных процессов носит существенно нелинейный, распределенных и стохостический характер, ведущие процессы в большинстве случаев являются билинейными. Если судить по аналогии, то билинейные системы появляются при описании взаимодействие молекул антител с чужеродным веществом.
Анализ биологических систем и управление ими допустимо на основе билинейных моделей, если взаимодействия между составляющими можно будет описать с помощью временных линейнных уравнении, принимающих значения из некоторого множества и определяющих действие иерархии. В данной работе рассмотрена система на основе билинейных моделей. Биологическая система требует преодоления жестких ограничении, связанных с требованиями линейности. Другая ее особенность-эта изменчивая структура. Эта свойства является важным в тех случаях, когда на управления накладывается ограничения.
Лемма. Управления вида
![]()
осуществляет стабилизацию движения системы:
![]() ;
;
![]() .
.
Доказательства данной леммы можно найти [1, 2, 3].
Постановка задачи. Выбором управления ![]() требуется стабилизировать движения на конечном отрезке времени.
требуется стабилизировать движения на конечном отрезке времени.
Пусть ![]() тогда стабилизирующее управление можно предоставить в виде:
тогда стабилизирующее управление можно предоставить в виде:
![]()
Для решения поставленной задачи взят процесс управления периодическим течением болезни [4, 5]. Этот процесс может быть описан:
![]() ,
,
![]() ,
,
![]()
с начальными условиями: ![]() ; :
; :![]() ; :
; :![]() ,
,
где первое уравнение описывает концентрацию зрелых плазмацитов, второе уравнение концентрацию антигена третье уравнение описывает концентрацию антител [6, 7].
Используем линеаризованную систему данной модели, которой получаем, пренебрегая членами x2x3.
Тогда матрица системы имеет вид:
Теперь вычислим собственные значения матрицы:
![]()
![]()
Как видно решения неустойчивое и мы рассматриваемой модели добавляем стабилизирующее управления на ![]() конечном отрезке:
конечном отрезке: ![]()
Фундаментальная матрица определяется из уравнения:
![]()
Теперь вычислим
![]()
Тогда имеем
После вычислим элементы матрицы:
![]()
Далее находим
![]()
Таким образом, решение рассматриваемой системы при стабилизирующем управлении имеет вид:
![]()
![]()
![]()
А стабилизирующее управление имеет вид:
![]()
![]()
![]()
Эти найденные выражения определют программное управление. Кроме этого, мы задачу исследовали с помощью численных методов.
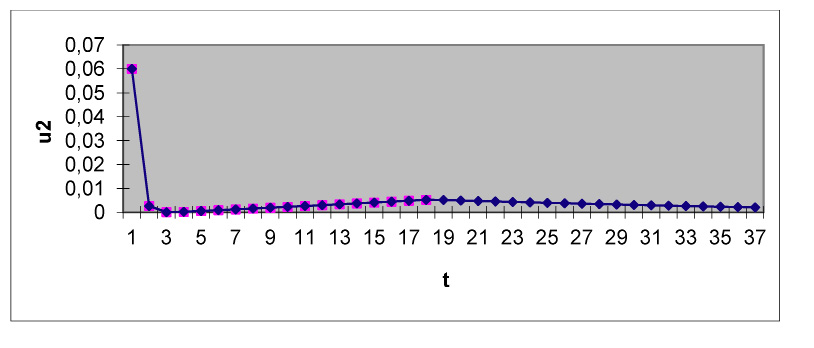
Изображение поведения управления u2 при 1,70<х1<1,89 , 5.1<х2<3.2, 0.9< х3<6.5
Рисунок показывает изменение поведения управления, в частности, u2. Именно u2 заменяет билинейность во втором уравнении системы моделируемого процесса. Как видно, в начальный момент времени значении u2 резко падает и даже достигает нулевого значения. Затем, через два часа, опять восстановливает свое значение и так плавно приближается к нулю.
Заключение. Оценку близости аппроксимационной модели можно получить, выбирая продолжительность времени ![]() . Таким образом, мы можем приближенно находить решение билинейной системы через решения линеаризованной системы, обеспечивающее стабилизацию системы на конечном отрезке времени.
. Таким образом, мы можем приближенно находить решение билинейной системы через решения линеаризованной системы, обеспечивающее стабилизацию системы на конечном отрезке времени.
Библиографическая ссылка
Жунусова Л.Х., Тойганбаева Н.А., Текесбаева Н.А. ИССЛЕДОВАНИЕ БИЛИНЕЙНЫХ СИСТЕМ С ПОМОЩЬЮ СТАБИЛИЗИРУЮЩЕГО УПРАВЛЕНИЯ // Международный журнал прикладных и фундаментальных исследований. 2014. № 1. С. 10-12;URL: https://applied-research.ru/en/article/view?id=4530 (дата обращения: 05.07.2026).