
Scientific journal
International Journal of Applied and fundamental research
ISSN 1996-3955
ИФ РИНЦ = 0,556
MICROCONTROLLER DEVICE OF BUILT-IN CONTROL OF MECHANICAL TRANSMISSION OF AC ELECTRIC DRIVES BACKLASH AND ARCHIVING OF CONTROL RESULTS

Известны аналоги – устройства встроенного контроля мертвых ходов (МХ) механических передач (МП) электроприводов (ЭП) постоянного тока в ходе их эксплуатации без демонтажа МП и электродвигателей (ЭД) постоянного тока с изделий, где они выполняют свои рабочие функции. Такие устройства ранее строились на основе аналоговых и цифровых ИМС [10, 11, 19], а на современном этапе – на основе микроконтроллеров (МК) [1-5, 15, 16].
Недостатком перечисленных устройств-аналогов является их неработоспособность при измерениях МХ МП ЭП переменного тока.
Известен также прототип [7] – микроконтроллерное устройство, обеспечивающее встроенный контроль МХ МП ЭП переменного тока, содержащее: ЭД переменного тока, который через контролируемую МП подсоединен к нагрузке; датчик контроля (ДК), включенный последовательно в статорную обмотку ЭД переменного тока – стандартный токовый шунт на 75 мВ, который исключает влияние ДК на режим работы ЭД переменного тока; пиковый амплитудный детектор (ПАД) [12], вход которого подключен к ДК; формирователя импульсов (ФИ) [13], вход которого подключен к выходу ПАД; МК – ATtiny28L [6, 14], работой которого управляет ФИ; четырехразрядный семисегментный знаковый индикатор (СЗИ) – АЛС329Б, который подключен к МК [6, 8] и высвечивает численное значение МХ МП ЭП переменного тока.
Недостатком этого микроконтроллерного устройства [7] является тот факт, что наряду с обеспечением успешного измерения (диагностирования) величины МХ МП ЭП переменного тока, оно не позволяет прогнозировать величину МХ МП ЭП переменного тока в процессе эксплуатации.
Постановка задачи
Предлагаемое микроконтроллерное устройство [17] должно решать задачу обеспечения возможности архивирования результатов измерения МХ МП ЭП переменного тока в процессе эксплуатации, которые используются при прогнозировании времени выхода величины МХ МП за пределы допустимых значений. Для чего при синтезе микроконтроллерного устройства встроенного контроля [9, 18] при каждом измерении МХ МП необходимо осуществлять архивирование двух параметров:
- величины измеренного МХ МП ЭП переменного тока;
- времени наработки МП ЭП переменного тока с начала эксплуатации до момента последнего измерения МХ МП.
Блок-схема устройства
Блок-схема микроконтроллерного устройства встроенного контроля МХ МП ЭП переменного тока и архивирования результатов контроля [17] представлена на рис. 1.
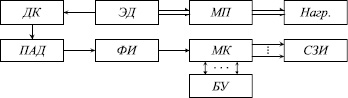
Рис. 1. Блок-схема микроконтроллерного устройства встроенного контроля МХ МП ЭП переменного тока и архивирования результатов контроля: ДК – датчик контроля; ЭД – электродвигатель переменного тока; МП – механическая передача; Нагр. – нагрузка ЭП; ПАД – пиковый амплитудный детектор; ФИ – формирователь импульсов; МК – микроконтроллер PIC16F877; СЗИ – девятиразрядный семисегментный знаковый индикатор АЛС356А; БУ – блок управления МК
Поставленная задача достигается тем, что в микроконтроллерное устройство встроенного контроля МХ МП ЭП переменного тока и архивирования результатов контроля [17], содержащее: ЭД переменного тока, соединенный с нагрузкой через контролируемую МП; ДК – стандартный токовый шунт на 75 мВ, исключающий влияние ДК на режим работы ЭД, который встроен в статорную обмотку ЭД переменного тока; ПАД [12], вход которого подключен к ДК; ФИ [13], вход которого подключен к выходу ПАД, введены восьмибитный МК – PIC16F877 [4, 9, 17], который наряду с FLASH-памятью программ и SRAM-памятью данных имеет энергонезависимую EEPROM-память данных, БУ МК и девятиразрядный СЗИ – АЛС356А, причем одна линия порта МК, настроенная на вход соединена с выходом ФИ, семь линий порта МК, настроенные как вход-выход, соединены с БУ, а семнадцать линий портов МК, настроенные как выход, подключены к девятиразрядному СЗИ. Блок-схему алгоритма работы МК – PIC16F877, программу на Ассемблере и HEX-файл для программирования МК [17] можно получить по e-mail: aai_tula@mail.ru.
Режимы работы устройства
1. Ввод в эксплуатацию (см. рис. 1). При программировании МК – PIC16F877 в его FLASH-память программ записываются паспортные или полученные экспериментально данные ЭД переменного тока: номинальная скорость вращения  [об/мин] и электромеханическая постоянная времени
[об/мин] и электромеханическая постоянная времени  [с] ЭД переменного тока.
[с] ЭД переменного тока.
2. Рабочий режим (см. рис. 1). В большинстве случаев включение ЭП для выполнения рабочих функций не сопровождается измерением МХ МП, так как величина МХ меняется медленно по мере износа МП в процессе эксплуатации. В этом режиме БУ по умолчанию настраивает МК устройства только на подсчет времени работы ЭП в данном цикле, которое фиксируется в SRAM-памяти данных МК – PIC16F877. При отключении ЭП время его работы в данном цикле суммируется с предыдущим временем наработки ЭП с начала эксплуатации и архивируется в EEPROM-память данных МК.
3. Режим измерения (см. рис. 1). Временные диаграммы работы микроконтроллерного устройства встроенного контроля МХ МП ЭП переменного тока и архивирования результатов контроля [17] в режиме измерения представлены на рис. 2.
-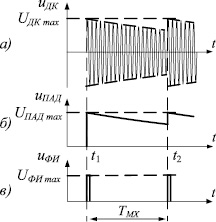
Рис. 2. Временные диаграммы работы микроконтроллерного устройства встроенного контроля МХ МП ЭП переменного тока и архивирования результатов контроля: а – выходной сигнал ДК; б – выходной сигнал ПАД; в – выходной сигнал ФИ
В этом режиме перед включением устройства (см. рис. 1) МХ МП устанавливается в максимальное положение. Подается питание на ПАД, ФИ и МК, а девятиразрядный СЗИ и БУ питаются от МК. С БУ на МК подается комбинация управляющих сигналов, задающая режим измерения МХ МП ЭП переменного тока.
В момент времени t1 (рис. 2) происходят следующие процессы: запускается в работу ЭД переменного тока и в его обмотке статора возникает импульс переменного пускового тока, который создает импульс переменного напряжения на ДК с амплитудой  (рис. 2,а); сигнал с ДК
(рис. 2,а); сигнал с ДК  поступает на ПАД, который детектирует фронт сигнала с ДК
поступает на ПАД, который детектирует фронт сигнала с ДК  (рис. 2,б); сигнал с ПАД
(рис. 2,б); сигнал с ПАД  подается на ФИ, который вырабатывает первый короткий импульс
подается на ФИ, который вырабатывает первый короткий импульс  (рис. 2,в), поступающий на МК; МК начинает отсчет времени выбора МХ TMX (рис. 2,в) МП и записывает его текущего значения в SRAM-память данных.
(рис. 2,в), поступающий на МК; МК начинает отсчет времени выбора МХ TMX (рис. 2,в) МП и записывает его текущего значения в SRAM-память данных.
В интервале времени  (рис. 2) протекают следующие физические процессы: ЭД переменного тока приходит во вращение; переменный пусковой ток обмотки статора ЭД и переменное напряжение на ДК uДК(t) (рис. 2,а) уменьшаются по экспоненте; тихоходный вал МП остается неподвижным, так как происходит выбор МХ МП, но он еще не выбран; напряжение на выходе ПАД uПАД(t) (рис. 2,б) уменьшается по экспоненте; напряжение на выходе ФИ равно нулю
(рис. 2) протекают следующие физические процессы: ЭД переменного тока приходит во вращение; переменный пусковой ток обмотки статора ЭД и переменное напряжение на ДК uДК(t) (рис. 2,а) уменьшаются по экспоненте; тихоходный вал МП остается неподвижным, так как происходит выбор МХ МП, но он еще не выбран; напряжение на выходе ПАД uПАД(t) (рис. 2,б) уменьшается по экспоненте; напряжение на выходе ФИ равно нулю  (рис. 2,в); МК продолжает отсчет времени выбора МХ TMX (рис. 2,в) МП ЭП и записывает его текущего значения в SRAM-память данных.
(рис. 2,в); МК продолжает отсчет времени выбора МХ TMX (рис. 2,в) МП ЭП и записывает его текущего значения в SRAM-память данных.
В момент времени t2 (рис. 2) происходят следующие процессы: закончен выбор МХ МП и приходит во вращение тихоходный вал МП и нагрузка; величина нагрузки на ЭД переменного тока скачкообразно возрастает и в его обмотке статора вновь возникает импульс переменного пускового тока, который создает импульс переменного напряжения на ДК  (рис. 2,а); сигнал с ДК
(рис. 2,а); сигнал с ДК  поступает на ПАД, который детектирует фронт сигнала с ДК
поступает на ПАД, который детектирует фронт сигнала с ДК  (рис. 2,б); сигнал с ПАД
(рис. 2,б); сигнал с ПАД  подается на ФИ, который вырабатывает второй короткий импульс
подается на ФИ, который вырабатывает второй короткий импульс  (рис. 2,в), поступающий на МК; МК заканчивает отсчет времени выбора МХ TMX (рис. 2,в) МП и запоминает его значение в SRAM-памяти данных в размерности [c]; МК производит расчет МХ
(рис. 2,в), поступающий на МК; МК заканчивает отсчет времени выбора МХ TMX (рис. 2,в) МП и запоминает его значение в SRAM-памяти данных в размерности [c]; МК производит расчет МХ  МП ЭП переменного тока [17]
МП ЭП переменного тока [17]
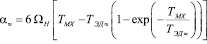 [градус]
[градус]
по заданному алгоритму и архивирует (записывает) его значение в EEPROM-память данных (физический смысл и размерности величин WН и  указаны в первом режиме – ввод в эксплуатацию).
указаны в первом режиме – ввод в эксплуатацию).
Рассмотренный режим измерения скоротечен и не влияет на общее времени работы ЭП переменного тока с начала его эксплуатации. Далее продолжается подсчет и архивирование в энергонезависимой EEPROM-память данных МК общего времени работы ЭП с начала его эксплуатации.
4. Режим вывода информации (см. рис 1) обеспечивается подачей управляющих сигналов: с БУ на МК по семи линиям порта, настроенным как вход-выход; с МК на девятиразрядный СЗИ по семнадцати линиям портов, настроенным как выход. Этот режим обеспечивает последовательное высвечивание на СЗИ всех измеренных в процессе эксплуатации величин МХ  МП ЭП переменного тока и соответствующего им времени наработки электропривода с начала эксплуатации до момента рассматриваемого измерения, которые архивированы в EEPROM-памяти данных МК. Причем четыре младших разряда девятиразрядного СЗИ высвечивают МХ
МП ЭП переменного тока и соответствующего им времени наработки электропривода с начала эксплуатации до момента рассматриваемого измерения, которые архивированы в EEPROM-памяти данных МК. Причем четыре младших разряда девятиразрядного СЗИ высвечивают МХ  МП ЭП с точностью до тысячной доли градуса, а пять старших разрядов – соответствующее ему время наработки ЭП переменного тока с начала эксплуатации с точностью до десятых долей часа.
МП ЭП с точностью до тысячной доли градуса, а пять старших разрядов – соответствующее ему время наработки ЭП переменного тока с начала эксплуатации с точностью до десятых долей часа.
Выводы
Введение в микроконтроллерное устройство встроенного контроля МХ МП ЭП переменного тока и архивирования результатов контроля восьмибитного МК фирмы Microchip PIC16F877, имеющего в своей структуре FLASH-память программ – 8 Кбайт, SRAM память данных – 368 байт и энергонезависимую EEPROM память данных – 256 байт, БУ МК и девятиразрядного СЗИ АЛС356А обеспечивает:
1. Архивирование в EEPROM-памяти МК численных значений измеренных величин МХ МП в процессе всего цикла эксплуатации ЭП переменного тока.
2. Архивирование в EEPROM-памяти МК времени наработки ЭП переменного тока с начала эксплуатации до каждого момента измерения МХ МП.
3. Вывод информации о величине и времени измерения МХ МП ЭП переменного тока, архивированных в EEPROM памяти данных МК, на девятиразрядный СЗИ, где четыре младших разряда высвечивают величины МХ МП, а пять старших разрядов – соответствующее им время наработки ЭП с начала эксплуатации и до момента измерения МХ МП. Это позволяет прогнозировать отказы МП ЭП переменного тока математическими методами [18].
Библиографическая ссылка
Анкудинов К.А. МИКРОКОНТРОЛЛЕРНОЕ УСТРОЙСТВО ВСТРОЕННОГО КОНТРОЛЯ МЕРТВОГО ХОДА МЕХАНИЧЕСКИХ ПЕРЕДАЧ ЭЛЕКТРОПРИВОДОВ ПЕРЕМЕННОГО ТОКА И АРХИВИРОВАНИЯ РЕЗУЛЬТАТОВ КОНТРОЛЯ // Международный журнал прикладных и фундаментальных исследований. 2014. № 4. С. 11-14;URL: https://applied-research.ru/en/article/view?id=5059 (дата обращения: 01.07.2026).