
![]() (1)
(1)
Scientific journal
International Journal of Applied and fundamental research
ISSN 1996-3955
ИФ РИНЦ = 0,556
ISSN 1996-3955
ИФ РИНЦ = 0,556
MICROCONTROLLER DEVICE OF BUILT-IN CONTROL OF ELECTRIC MOTOR TIME CONSTANT AND THE MECHANICAL TRANSMISSION OF DC ELECTRIC DRIVE BACKSLASH
Ankudinov K.A. 1
1 Financial University under the Government of the Russian Federation

943 KB
Microcontroller device after the patent for utility model 77121 (Russian Federation) belongs to electric machine-building, in particular to built-in control devices of electromechanical time constant of DC electric motors and the backlashes of DC electric drives mechanical transmissions in the course of their operation without dismantling of mechanical transmissions and electric motors from the articles where they execute their running functions.
microcontroller
DC electric drive
electromechanical time constant
mechanical transmission
backlash
Введение
Известны аналоги – устройства встроенного контроля мертвых ходов (МХ) механических передач (МП) электроприводов (ЭП) постоянного тока в ходе их эксплуатации без демонтажа МП и электродвигателей (ЭД) постоянного тока с изделий, где они выполняют свои рабочие функции. Такие устройства в 80-х, 90-х годах прошлого столетия синтезировались на основе аналоговых, цифровых ИМС и операционных усилителях (ОУ) [8-10, 23], что и определило их основные недостатки – низкую точность, большие габариты, веса и энергопотребление.
На современном этапе развития микроконтроллерной схемотехники существует ряд известных методик синтеза устройств рассматриваемого класса [1-6, 12-15, 18] на основе современных микроконтроллеров (МК).
Известен прототип [16] – микроконтроллерное устройство встроенного контроля МХ МП ЭП и архивирования результатов контроля содержащее: ЭД, который через контролируемую МП подсоединен к нагрузке; датчик контроля (ДК) [8], включенный последовательно в обмотку ЭД – стандартный токовый шунт на 75 мВ, который исключает влияние ДК на режим работы ЭД; пиковый амплитудный детектор (ПАД) [11], вход которого подключен к ДК; формирователя импульсов (ФИ) [10], вход которого подключен к выходу ПАД; МК – PIC16F877 [16, 22], работой которого управляет ФИ; семисегментный знаковый индикатор (СЗИ) – АЛС356А, который подключен к МК – PIC16F877 и высвечивает численное значение измеренного МХ α МП ЭП, которое рассчитывается МК из выражения [16]
где ΩН – номинальная скорость вращения ЭД [об/мин], ТМХ – время выбора МХ МП [с], ТЭД – электромеханическая постоянная времени ЭМПВ ТЭД ЭД [с] (численные значения ΩН и ТЭД обычно берутся из паспорта (технического описания) ЭД и заносятся в энергонезависимую EEPROM-память данных МК, а ТМХ – измеряется прототипом [16] в процессе работы устройства.
Основными недостатками устройств – аналогов [8-10, 23] и прототипа – микроконтроллерное устройство [16] является тот факт, что наряду с достаточно алгоритмичным обеспечением процесса измерения величины МХ α МП ЭП по выражению (1), точность измерения МХ α МП ЭП существенным образом зависит от величины ЭМПВ ТЭД ЭД постоянного тока, которая определяется совокупностью параметров МП ЭП, собственно ЭД постоянного тока и параметрами окружающей среды, где наиболее существенными факторами, являются:
– текущее техническое состояние МП и ЭД постоянного тока (в процессе эксплуатации существенно изменяются коэффициент трения в элементах и сочленениях МП и ЭД);
– изменение климатических показателей окружающей среды (температуры, влажности, давления и др.), в которой происходит всесезонная эксплуатация предлагаемого микроконтроллерного устройства встроенного контроля ЭМПВ ТЭД ЭД и МХ α МП ЭП постоянного тока.
Анализ указанных недостатков, проявляющихся в конкретных неблагоприятных условиях эксплуатации устройств рассматриваемого класса (отличающихся от нормальных условий, указанных в технической документации) показывает, что ошибки измерения МХ α МП ЭП (1) могут изменяться до 2-2,5 раз, поэтому использование в расчетной формуле (1) численного значения ЭМПВ ТЭД ЭД, указанного в паспорте (техническом описании) ЭД – нецелесообразно.
Постановка задачи
Предлагаемое микроконтроллерное устройство встроенного контроля ЭМПВ ЭД и МХ МП ЭП постоянного тока [17] должно решать две задачи:
1. Обеспечение возможности оперативного измерения ЭМПВ ТЭД ЭД постоянного тока в каждом процессе измерения МХ МП ЭП постоянного тока.
2. Учет реального значения – каждого измеренного значения ЭМПВ ТЭД ЭД постоянного тока при расчете измеряемого МХ α МП ЭП постоянного тока в формуле (1).
Блок-схема устройства
Для выполнения п.1 поставленной задачи обратимся к исследованиям [14, 15], где показано, что время достижения экстремума напряжения ТЭ на выходе пассивного апериодического звена (ПАЗ) первого порядка определяется из выражения:
![]() , (2)
, (2)
где ТЭД – ЭМПВ ЭД постоянного тока (измеряемая величина), ТАЗ – постоянная времени ПАЗ (величина известная), k – кратность пускового тока (напряжения) ЭД постоянного тока (берется из технической документации на ЭД – величина постоянная для каждого конкретного ЭД постоянного тока).
Следовательно, в отличие от аналогов [8-10, 23] и прототипа [16] предлагаемое микроконтроллерное устройство [17] дополнительно должно включать в себя ПАЗ первого порядка и узел выявления экстремума напряжения (УВЭН) на выходе ПАЗ.
Следует отметить, что выражение (2) неразрешимо относительно ТЭД в аналитическом виде, оно является трансцендентным уравнением относительно ТЭД и может быть решено с заданной точностью только одним из известных численных методов.
Блок-схема микроконтроллерного устройства встроенного контроля ЭМПВ ЭД и МХ МП ЭП постоянного тока [17] представлена на рис. 1.
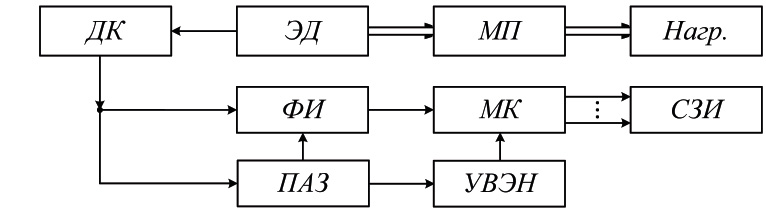
Рис. 1. Блок-схема микроконтроллерного устройства встроенного контроля постоянной времени электродвигателя и мертвого хода механической передачи электропривода постоянного тока: ДК – датчик контроля; ЭД – электродвигатель постоянного тока; МП – механическая передача; Нагр. – нагрузка ЭП; ФИ – формирователь импульсов, МК – микроконтроллер ATmega48; СЗИ – четырехразрядный семисегментный знаковый индикатор АЛС329Б; ПАЗ – пассивное апериодическое звено первого порядка; УВЭН – узел выявления экстремума напряжения на выходе ПАЗ
Поставленная задача достигается тем, что в микроконтроллерное устройство встроенного контроля ЭМПВ ТЭД ЭД и МХ α МП ЭП постоянного тока [17], содержащее: ЭД постоянного тока, соединенный с нагрузкой (на рис. 1 – Нагр.) через контролируемую МП; ДК [8] – стандартный токовый шунт на 75 мВ, исключающий влияние ДК на режим работы ЭД, который встроен в якорную обмотку ЭД постоянного тока; ФИ [13], вход которого подключен к выходу ДК, введены восьмибитный AVR МК фирмы «Atmel» – ATmega48 [4, 21], который наряду с FLASH-памятью программ и SRAM-памятью данных имеет энергонезависимую EEPROM-память данных; четырехразрядный СЗИ – АЛС329Б [5]; ПАЗ первого порядка [14, 15]; с постоянной времени ТАЗ , вход которого подключен к выходу ДК; УВЭН [11], выполненный на ОУ – КР140УД708 с накопительным конденсатором и диодом утечки, вход которого подключен к выходу ПАЗ; одна линия порта МК – ATmega48, настроенная на вход, соединена с выходом ФИ, вторая линия порта МК, настроенная на вход соединена с выходом УВЭН, двенадцать линий портов МК, настроенные на выход, подключены к четырехразрядному СЗИ – АЛС329Б. Конструкция микроконтроллерного устройства [17] разработана в соответствии с эргономическими требованиями, предложенными в [7, 19, 20].
Этапы работы устройства
1. Ввод в эксплуатацию (см. рис. 1). На первом этапе происходит инициализация и программирование МК – ATmega48 [21]: в FLASH-память программ записывается программа работы МК; в энергонезависимую EEPROM-память данных – паспортные (из технической документации) номинальная скорость вращения ΩН [об/мин] и k – кратность пускового тока (напряжения) ЭД постоянного тока, известная постоянная времени ПАЗ ТАЗ первого порядка; в SRAM-памяти данных выделяются регистры оперативной памяти для обеспечения программы работы МК.
2. Рабочий режим (см. рис. 1). В большинстве случаев включение ЭП для выполнения рабочих функций не сопровождается измерением МХ МП и ЭМПВ ЭД постоянного тока так как их величины α и ТЭД меняется медленно по мере износа элементов ЭП в процессе эксплуатации. Но изменения α и ТЭД могут оказаться существенными при изменении климатических условий.
3. Режим измерения (см. рис. 1). Временные диаграммы работы микроконтроллерного устройства встроенного контроля постоянной времени электродвигателя и мертвого хода механической передачи электропривода постоянного тока [17] в режиме измерения представлены на рис. 2. Перед включением устройства в режиме измерения МХ МП устанавливается в максимальное положение (как и в аналогах и прототипе) и затем подается питание на устройство.
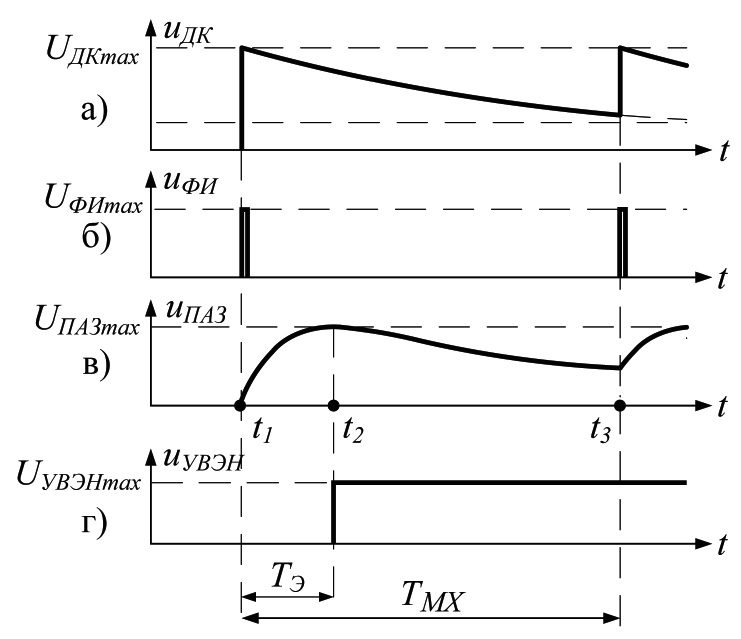
Рис. 2. Временные диаграммы работы микроконтроллерного устройства встроенного контроля постоянной времени электродвигателя и мертвого хода механической передачи электропривода постоянного тока: а – выходной сигнал ДК; б – выходной сигнал ФИ; в – выходной сигнал ПАЗ первого порядка; г – выходной сигнал УВЭН
В момент времени t1 (рис. 2) в устройстве происходят следующие физические процессы: запускается в работу ЭД постоянного тока и в его обмотке якоря возникает импульс пускового тока, который создает импульс постоянного напряжения на ДК с амплитудой uДК(t1)=UДКmax (рис. 2,а); сигнал с ДК uДК(t1), во-первых, поступает на ФИ, который вырабатывает первый короткий импульс uФИ(t1)=UФИmax (рис. 2,б), поступающий на МК, во-вторых, подается на вход ПАЗ первого порядка, сигнал на выходе которого в рассматриваемый момент времени uПАЗ(t1)=0 (рис. 2,в); МК готовится к началу отсчета, во-первых, времени выбора МХ ТМX МП (рис. 2,г) и, во-вторых, времени достижения экстремума напряжения ТЭ на выходе ПАЗ первого порядка (рис. 2,г), которые будут записываться в SRAM-память данных МК
В интервале времени t![]() (t1;t2) (рис. 2) в устройстве протекают следующие физические процессы: ЭД постоянного тока приходит во вращение; пусковой ток обмотки якоря ЭД и постоянное напряжение на ДК uДК(t
(t1;t2) (рис. 2) в устройстве протекают следующие физические процессы: ЭД постоянного тока приходит во вращение; пусковой ток обмотки якоря ЭД и постоянное напряжение на ДК uДК(t![]() (t1;t2)) (рис. 2,а) уменьшаются по экспоненте с постоянной времени, равной ЭМПВ ТЭД ЭД; тихоходный вал МП остается неподвижным, так как происходит выбор МХ МП, но он еще не выбран; напряжение на выходе ФИ равно нулю uФИ(t
(t1;t2)) (рис. 2,а) уменьшаются по экспоненте с постоянной времени, равной ЭМПВ ТЭД ЭД; тихоходный вал МП остается неподвижным, так как происходит выбор МХ МП, но он еще не выбран; напряжение на выходе ФИ равно нулю uФИ(t![]() (t1;t2))=0 (рис. 2,б); напряжение на выходе ПАЗ uПАЗ(t
(t1;t2))=0 (рис. 2,б); напряжение на выходе ПАЗ uПАЗ(t![]() (t1;t2)) (рис. 2,в) нарастает по экспоненте, но не достигает своего экстремального значения; МК, во-первых, производит отсчет времени выбора МХ ТМX МП ЭП (рис. 2,г) и, во-вторых, времени достижения экстремума напряжения ТЭ на выходе ПАЗ (рис. 2,г), текущие значения которых МК записывает и хранит в своей SRAM-памяти данных.
(t1;t2)) (рис. 2,в) нарастает по экспоненте, но не достигает своего экстремального значения; МК, во-первых, производит отсчет времени выбора МХ ТМX МП ЭП (рис. 2,г) и, во-вторых, времени достижения экстремума напряжения ТЭ на выходе ПАЗ (рис. 2,г), текущие значения которых МК записывает и хранит в своей SRAM-памяти данных.
В момент времени t2 (фиг. 2) в устройстве происходят следующие физические процессы: ЭД постоянного тока продолжает вращение; напряжение на ДК uДК(t2) (рис. 2,а) продолжает уменьшаться по экспоненте; напряжение на выходе ФИ остается равным нулю uФИ(t2)=0 (рис. 2,б); напряжение на выходе ПАЗ достигает своего экстремального значения uПАЗ(t2)=UПАЗmax (рис. 2,в); напряжение на выходе УВЭН скачком принимает максимальное значение uУВЭН(t2)=UУВЭНmax (рис. 2,г); МК, во-первых, продолжает отсчет времени выбора МХ ТМX МП ЭП (рис. 2,г) и, во-вторых, прекращает отсчет времени достижения экстремума напряжения выходного сигнала ПАЗ первого порядка ТЭ=t2-t1 (рис. 2,г), которое запоминается в SRAM памяти данных МК в размерности [c].
В интервале времени t![]() (t2;t3) (рис. 2) в устройстве протекают следующие физические процессы: ЭД постоянного тока продолжает вращение; напряжение на ДК uДК(t
(t2;t3) (рис. 2) в устройстве протекают следующие физические процессы: ЭД постоянного тока продолжает вращение; напряжение на ДК uДК(t![]() (t2;t3)) (рис. 2,а) продолжает уменьшаться по экспоненте; тихоходный вал МП ЭП продолжает оставаться неподвижным, так как продолжается выбор МХ МП, но он еще не выбран; напряжение на выходе ФИ равно нулю uФИ(t
(t2;t3)) (рис. 2,а) продолжает уменьшаться по экспоненте; тихоходный вал МП ЭП продолжает оставаться неподвижным, так как продолжается выбор МХ МП, но он еще не выбран; напряжение на выходе ФИ равно нулю uФИ(t![]() (t1;t2))=0 (рис. 2,б); МК, во-первых производит расчет ЭМПВ ТЭД ЭД постоянного тока численным методом из трансцендентного уравнения (2) по известным численным значениям ТАЗ, k (находятся в энергонезависимой EEPROM-памяти данных) и ТЭ (запомнено в SRAM-памяти данных в момент времени t2 на рис. 2), во-вторых, записывает в SRAM-памяти данных рассчитанное численное значение ЭМПВ ТЭД ЭД постоянного тока в размерности [c] и, в-третьих, продолжает отсчет времени выбора МХ ТМХ МП ЭП (рис. 2,г).
(t1;t2))=0 (рис. 2,б); МК, во-первых производит расчет ЭМПВ ТЭД ЭД постоянного тока численным методом из трансцендентного уравнения (2) по известным численным значениям ТАЗ, k (находятся в энергонезависимой EEPROM-памяти данных) и ТЭ (запомнено в SRAM-памяти данных в момент времени t2 на рис. 2), во-вторых, записывает в SRAM-памяти данных рассчитанное численное значение ЭМПВ ТЭД ЭД постоянного тока в размерности [c] и, в-третьих, продолжает отсчет времени выбора МХ ТМХ МП ЭП (рис. 2,г).
В момент времени t3 (рис. 2) в устройстве происходят следующие процессы: закончен выбор МХ МП и приходит во вращение тихоходный вал МП и нагрузка; величина нагрузки на ЭД постоянного тока скачкообразно возрастает и в его обмотке якоря вновь возникает импульс пускового тока, который создает импульс постоянного напряжения на ДК uДК(t3)=UДКmax (рис. 2,а); сигнал с ДК uДК(t3) поступает на ФИ, который вырабатывает второй короткий импульс uФИ(t3)=UФИmax (рис. 2,б), поступающий на МК; МК, во-первых, заканчивает отсчет времени выбора МХ TMX=t3-t1 МП (рис. 2,г) и запоминает его значение в SRAM-памяти данных в размерности [c] и, во-вторых производит расчет МХ α МП ЭП постоянного тока по заданному алгоритму – формула (1) и высвечивает измеренное численное значение α в четырехразрядном СЗИ – АЛС329Б с точностью до тысячной доли градуса.
Выводы
Введение в микроконтроллерное устройство встроенного контроля ЭМПВ ТЭД ЭД и МХ α МП ЭП постоянного тока [17] восьмибитного AVR МК фирмы «Atmel» – ATmega48, имеющего в своей структуре FLASH-память программ – 4 Кбайт, SRAM-память данных – 512 байт и энергонезависимую EEPROM-память данных – 256 байт, ПАЗ первого порядка с известной постоянной времени ТАЗ, УВЭН и четырехразрядного СЗИ – АЛС329Б обеспечивает существенное расширение функциональной полноты и точности работы устройства:
1. Возможность точного расчета из трансцендентного уравнения (2) численным методом реального численного значения ЭМПВ ТЭД ЭД постоянного тока именно в рассматриваемый момент времени по известным значениям k, ТЭ и ТАЗ. Точность измерения увеличивается до 2-2,5 раз по сравнению с паспортными значениями ТЭД .
2. Повышение точности расчета МХ α МП ЭП постоянного тока по выражению (1) за счет измерения с повышенной точностью ЭМПВ ТЭД ЭД постоянного тока.
3. Вывод информации о величине МХ α МП ЭП постоянного тока на четырехразрядный СЗИ с точностью 0,001 градуса.
Библиографическая ссылка
Анкудинов К.А. МИКРОКОНТРОЛЛЕРНОЕ УСТРОЙСТВО ВСТРОЕННОГО КОНТРОЛЯ ПОСТОЯННОЙ ВРЕМЕНИ ЭЛЕКТРОДВИГАТЕЛЯ И МЕРТВОГО ХОДА МЕХАНИЧЕСКОЙ ПЕРЕДАЧИ ЭЛЕКТРОПРИВОДА ПОСТОЯННОГО ТОКА // Международный журнал прикладных и фундаментальных исследований. 2014. № 8-2. С. 72-76;URL: https://applied-research.ru/en/article/view?id=5586 (дата обращения: 16.07.2026).