
Scientific journal
International Journal of Applied and fundamental research
ISSN 1996-3955
ИФ РИНЦ = 0,556
SIMULATION RHEOSTATIC STARTING DC MOTOR WITH SEPARATE EXCITATION

Пакет программ MatLab предназначен для аналитического и численного решения различных математических задач, а также для моделирования электротехнических и электромеханических систем. MatLab получил наиболее распространенное применение в инженерной практике в отличие от других подобных программ (Mathematica, Maple, Mathcad). MatLab, сокращённое название Matrix Laboratory, является интерактивной системой для выполнения научных и инженерных расчётов. В состав системы входит ядро компьютерной алгебры Maple и пакет расширения Simulink, а также десятки других пакетов расширений, что позволяет моделировать сложные электротехнические устройства.
Библиотека блоков SimPowerSystems является одной из множества дополнительных библиотек Simulink ориентированных на моделирование электромеханических и электроэнергетических систем и устройств. SimPowerSystems содержит набор блоков для имитационного моделирования электротехнических устройств. В состав библиотеки входят модели пассивных и активных электротехнических элементов, источников энергии, электродвигателей, трансформаторов, линий электропередачи и прочего оборудования. Имеется также раздел содержащий блоки для моделирования устройств силовой электроники, включая системы управления для них. Используя специальные возможности Simulink и SimPowerSystems, пользователь может не только имитировать работу устройств во временной области, но и выполнять различные виды анализа таких устройств. В частности, пользователь имеет возможность рассчитать установившийся режим работы системы на переменном токе, выполнить расчет импеданса участка цепи, получить частотные характеристики, проанализировать устойчивость, а также выполнить гармонический анализ токов и напряжений. Более подробно об этом изложено в [11].
Несомненным достоинством SimPowerSystems является то, что сложные электротехнические системы можно моделировать, сочетая методы имитационного и структурного моделирования. Например, силовую часть полупроводникового преобразователя электрической энергии можно выполнить с использованием имитационных блоков SimPowerSystems, а систему управления с помощью обычных блоков Simulink, отражающих лишь алгоритм ее работы, а не ее электрическую схему. Такой подход, в отличие от пакетов схемотехнического моделирования, позволяет значительно упростить всю модель, а значит повысить ее работоспособность и скорость работы. Кроме того, в модели с использованием блоков SimPowerSystems можно использовать блоки и остальных библиотек Simulink, а также функции самого MatLab, что дает практически не ограниченные возможности для моделирования электротехнических систем [5].
Целью моделирования является построение характеристик зависимости тока, момента и угловой скорости вращения электродвигателя от времени при пуске, а также определение перерегулирования, разрегулирования и времени переходного процесса. Для проведения моделирования используем данные двигателя постоянного тока типа 4ПФ160М, которые принимаем по [1]. Основные справочные данные выглядят следующим образом: Рн = 18,5 кВт, νмакс = 4500 об/мин, КПД = 0,808, Iн = 49,6 А. Произведем расчет недостающих обмоточных данных по методике профессора И.В. Черных, изложенной в [15]. Определяем следующие параметры: сопротивления обмоток якоря и возбуждения, индуктивность обмоток якоря и возбуждения, взаимоиндукцию, требуемое сопротивление реостатных ступеней, момент инерции.
Переходим к построению модели двигателя постоянного тока с независимым возбуждением при реостатном пуске. Модель представляет собой принципиальную схему, состоящую из двух источников питания обмоток двигателя и возбуждения, самого двигателя постоянного тока, блока реостатных ступеней, измерителей тока и напряжения, блока для измерения основных параметров двигателя, сопротивления имитирующего нагрузку, осциллографов для измерения тока, момента и скорости и графопостроителя для отображения электромеханической характеристики двигателя.
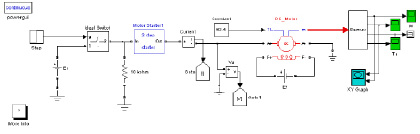
Рис. 1. Модель реостатного пуска двигателя постоянного тока
Рассчитанные параметры двигателя подставляем в окно параметров блока двигателя постоянного тока, изображенного на рисунке ниже.

Рис. 2. Параметры двигателя постоянного тока
Промоделировав, снимаем показатели тока, угловой скорости и момента. Так же строим механическую характеристику двигателя постоянного тока. Сравниваем рассчитанные параметры с результатами моделирования и делаем соответствующие выводы.
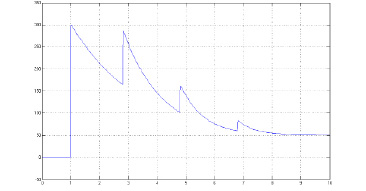
Рис. 3. Ток якоря двигателя постоянного тока
На этом графике показано значение тока якоря при заданных параметрах двигателя. Данные значения имеют следующие характеристики: в момент запуска двигателя пусковой ток достигает значения 300 А, после включения первой реостатной ступени его значение понижается до 165 А, затем при вводе в действие второй ступени он опускается до 100 А и, наконец, после включения третьей ступени он выходит на своё номинальное значение 50А, что соответствует паспортных данным.
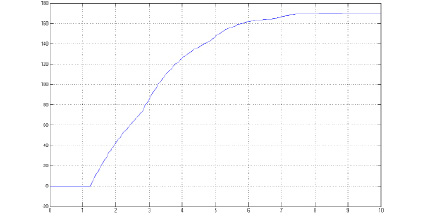
Рис. 4. Частота вращения двигателя постоянного тока
Данный график показывает параметры частоты вращения двигателя в зависимости от времени моделирования. Из графика видно, что время переходного процесса моделирования немного превышает 1 секунду, а перерегулирование отсутствует. Это вполне удовлетворяет условиям быстродействия системы электропривода при реостатном пуске. После разгона через 9 секунд двигатель выходит на свою номинальную частоту вращения 170 рад/с, что соответствует скорости 1630 об/мин. Указанное значение не превышает паспортного максимального значения 4500 об/мин, но немного выше номинального рабочего значения 1500 об/мин. Такое превышение может незначительно повысить электропотребление и сократить срок службы двигателя.
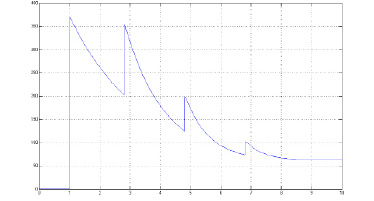
Рис. 5. Электромагнитный момент двигателя постоянного тока
График момента отображает зависимость электромагнитного момента двигателя от времени моделирования. При пуске пусковой момент достигает значения 370 Н*м, после включения первой реостатной ступени его значение понижается до 200 Н*м, затем при вводе в действие второй ступени он опускается до 125 Н·м и, наконец, после включения третьей ступени он выходит на своё номинальное значение 65 Н·м, что не соответствует расчетному значению, которое составляет 108 Н·м.
Далее построим механическую характеристику двигателя постоянного тока. Она отображает зависимость частоты вращения двигателя от электромагнитного момента. На построенной характеристике можно определить рабочую точку двигателя, которая соответствует значению частоты 170 рад/с и момента 65 Н·м (рис. 6).
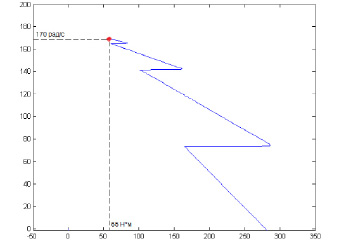
Рис. 6. Зависимость частоты вращения двигателя от электромагнитного момента (механическая характеристика)
Произведя моделирование реостатного пуска двигателя постоянного тока, и рассмотрев полученные графики и данные, можно утверждать, что реостатный пуск вполне подходит для двигателей постоянного тока средней мощности (10-100 кВт). Хотелось бы отметить, что моделирование более мощного двигателя постоянного тока с преобразователем частоты ранее подробно рассматривалось в [2].
В результате проделанной работы была создана модель функционального уровня реостатного пуска двигателя постоянного тока с независимым возбуждением. В ходе работы были определены оптимальные параметры эксперимента, обеспечивающие выполнения расчетов при необходимой точности и, кроме того, обеспечивающие лучшую наглядность результатов. Результаты эксперимента представлены в графиках. Оценка результатов позволяет считать данный способ пуска двигателя удовлетворяющим всем целям и требованиям. Можно однозначно считать использование реостатного пуска (по сравнению с прямым пуском) более предпочтительным для двигателей постоянного тока средней мощности. Описание прочих различных способов пуска и исследования режимов работы всех типов двигателей в программе MatLab изложено в работах [3, 4, 6-10, 12-14, 16].
Библиографическая ссылка
Семёнов А.С. МОДЕЛИРОВАНИЕ РЕОСТАТНОГО ПУСКА ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА С НЕЗАВИСИМЫМ ВОЗБУЖДЕНИЕМ // Международный журнал прикладных и фундаментальных исследований. 2014. № 9-2. С. 29-34;URL: https://applied-research.ru/en/article/view?id=5825 (дата обращения: 11.07.2026).