
Scientific journal
International Journal of Applied and fundamental research
ISSN 1996-3955
ИФ РИНЦ = 0,556
WELDING SIMULATOR

Применение робототехники – универсальный путь автоматизации сварочной технологии не только в серийном, но и мелкосерийном производстве, так как при смене изделия можно использовать тот же робот, изменяя лишь его программу. Роботы позволяют заменить монотонный физический труд, повысить качество сварных изделий, увеличить их выпуск. Один робот может заменить труд четырех человек. Сварочный робот – это универсальный промышленный робот, который является носителем сварочной горелки. Сварочный робот имеет дополнительный сварочный интерфейс и специально адаптированное под процесс сварки программное обеспечение [1].
Минобрнауки РФ 12.11.2014 [2] предложил проект по разработке стратегии развития робототехники в российских вузах и школах. В правительстве предложили внедрить такой проект в формате факультативных занятий, на которых учащиеся будут учиться конструировать роботов, поэтому решение проблемы обучения студентов, обучающихся по направлению 150700 «Машиностроение» навыкам работы со сварочными роботами, их программированием и настройкой, является актуальной задачей.
Разработанные сварочные тренажеры (ДТС-02 [3], VRTEX [4], МДТС-05М1 [5] и др.) предназначенные для обучения сварщиков-рабочих, а не для специалистов высокой квалификации операторов робототехнических комплексов. В связи с массовым внедрением в современное производство сварочных роботов данные обучающие тренажеры не позволяют приобрести навыки работы с непосредственным программированием и настройкой сварочных роботов-манипуляторов.
В настоящий момент существует широкий спектр робототехнических конструкторов [6]: Lego, Robobuilder, Tetrix, Matrix и др. позволяющих смоделировать робота. Все они имеют свои плюсы и минусы. Наиболее подходящим конструктором для моделирования сварочного робота является LEGO MINDSTORMS.
Разработанная модель на основе конструктора [7] позволяет непосредственно моделировать процесс сварки, однако имеется ряд недостатков: люфт между соединительными деталями конструктора, небольшой люфт выходного вала серводвигателя, ограниченный объем Flash-памяти в размере 256 Кбайт, наличие у микроконтроллера только трёх разъёмов для подсоединения серводвигателей, которые можно устранить в последующей модели сварочного робота-манипулятора, применяя аналоговые и цифровые серводвигатели, не входящие в состав конструктора LEGO MINDSTORMS, и более усовершенствованные микроконтроллеры с большим объёмом оперативной и Flash-памяти [8].

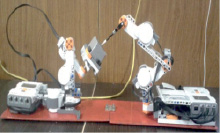
Рис. 1. Модель сварочного тренажера-манипулятора [7]
В данный момент закончена работа по созданию полноразмерной улучшенной модели сварочного робота-манипулятора WELDING SIMULATOR на основе мощных серводвигателей и программирования на языке СИ. В качестве программируемого элемента используется микроконтроллер серии ATMega[9] и программатор AVR[10]. Себестоимость такого робота невысокая (по сравнению с брендовыми зарубежными аналогами), что позволит использовать данную модель для выработки профессиональных компетенций программирования у студентов, обучающихся по направлению 150700 «Машиностроение».
В разработанной модели используется шесть мощных серводвигателя марки MG996R и один микро серводвигатель марки SG90. Узлов вращения в данной модели шесть.
В качестве материала для изготовления тела этой модели был выбран пластик в связи с его малым весом, лёгкости обработки и склеивания, дешевизны. Источником питания является компьютерный блок питания Microlab M-ATX-350W с двумя выделенными проводами + и – на 5 вольт.


Рис. 2. Модель сварочного робота WELDING SIMULATOR
Программа для этой модели сварочного робота написана и компилирована в среде Programmers Notepad [WinAVR], преобразована в 16-тиричную систему исчисления в PonyProg2000, и загружена на микроконтроллер программатором AVR.
Поворот двигателей задаётся изменением угла их вращения на определенное число в массиве программы (Рис. 3, 4).

Рис. 3. Часть текста программы управления роботом

Рис. 4. Программный код после компиляции
Себестоимость модели сварочного тренажера невысокая (по сравнению с бредовыми зарубежными аналогами), что позволяет использовать данный сварочный тренажер для выработки профессиональных компетенций программирования у студентов ЮТИ ТПУ, обучающихся по направлению 150700 «Машиностроение» профиль «Оборудование и технология сварочного производства».
Данная разработка отмечена Золотой медалью Кузбасской выставочной компании в рамках Кузбасского образовательного форума 14.02.2014. За разработку «Создания действующей модели сварочного робота-манипулятора, используемой в качестве обучающего стенда для выработки практических навыков программирования у студентов направления 150700 «Машиностроение».
Библиографическая ссылка
Ильященко Д.П., Крюкова О.М. WELDING SIMULATOR // Международный журнал прикладных и фундаментальных исследований. 2014. № 12-1. С. 62-65;URL: https://applied-research.ru/en/article/view?id=6263 (дата обращения: 16.07.2026).