
Scientific journal
International Journal of Applied and fundamental research
ISSN 1996-3955
ИФ РИНЦ = 0,556
MATHEMATICAL MODELING OF SURFACE WAVES STRESSES IN THE TASK LAMB IMPACT IN THE FORM OF A DELTA FUNCTION

Постановка задачи
Для решения задачи о моделировании нестационарных упругих волн в деформируемых областях сложной формы рассмотрим некоторое тело Г (рис. 1) в прямоугольной декартовой системе координат ХОY, которому в начальный момент времени  сообщается механическое воздействие. Предположим, что тело Г изготовлено из однородного изотропного материала, подчиняющегося упругому закону Гука при малых упругих деформациях.
сообщается механическое воздействие. Предположим, что тело Г изготовлено из однородного изотропного материала, подчиняющегося упругому закону Гука при малых упругих деформациях.
Рис. 1. Некоторое тело Г в прямоугольной декартовой системе координат XOY
Точные уравнения двумерной (плоское напряженное состояние) динамической теории упругости имеют вид
 ,
,  ,
,
 ,
,
 ,
,
 ,
,
 ,
,
 ,
,  ,
,  ,
,
 , (1)
, (1)
где  ,
,  и
и  – компоненты тензора упругих напряжений;
– компоненты тензора упругих напряжений;  ,
,  и
и  – компоненты тензора упругих деформаций; u и v – cоставляющие вектора упругих перемещений вдоль осей OX и OY соответственно; r – плотность материала;
– компоненты тензора упругих деформаций; u и v – cоставляющие вектора упругих перемещений вдоль осей OX и OY соответственно; r – плотность материала;  – скорость продольной упругой волны;
– скорость продольной упругой волны;  – скорость поперечной упругой волны; n – коэффициент Пуассона; E – модуль упругости;
– скорость поперечной упругой волны; n – коэффициент Пуассона; E – модуль упругости;  – граничный контур тела Г.
– граничный контур тела Г.
Систему (1) в области, занимаемой телом Г, следует интегрировать при начальных и граничных условиях.
Начальные условия в области Г зададим в виде
 ,
,  ,
,  ,
,
 ,
,  , (2)
, (2)
где  ,
,  ,
,  и
и  – заданные в области Г функции.
– заданные в области Г функции.
Граничные условия зададим в виде:
составляющих компонентов тензора упругих напряжений на границе S1
 ,
,  ,
,
 ; (3)
; (3)
составляющих компонентов вектора упругих перемещений на границе S2
 ,
,  ,
,  , (4)
, (4)
где l и m – направляющие косинусы;  ,
,  ,
,  и
и  – заданные на границе S функции.
– заданные на границе S функции.
В работах [1–10] приведена информация о моделировании волн напряжений в деформируемых областях.
Метод решения двумерной плоской динамической задачи теории упругости
Для решения двумерной плоской динамической задачи теории упругости с начальными и граничными условиями – используем метод конечных элементов в перемещениях. Задача решается методом сквозного счета, без выделения разрывов. Чтобы выполнить динамический расчет методом конечных элементов, нужно иметь матрицу жесткости и матрицу инерции конечного элемента.
Принимая во внимание определение матрицы жесткости, вектора инерции и вектора внешних сил для тела Г, записываем приближенное значение уравнения движения в теории упругости
 ,
,  ,
,  , (5)
, (5)
где  – матрица инерции;
– матрица инерции;  – матрица жесткости;
– матрица жесткости;  – вектор узловых упругих перемещений;
– вектор узловых упругих перемещений;  – вектор узловых упругих скоростей перемещений;
– вектор узловых упругих скоростей перемещений;  – вектор узловых упругих ускорений;
– вектор узловых упругих ускорений;  – вектор узловых упругих внешних сил.
– вектор узловых упругих внешних сил.
Соотношение (5) система линейных обыкновенных дифференциальных уравнений второго порядка в перемещениях с начальными условиями. Таким образом, с помощью метода конечных элементов в перемещениях, линейную задачу с начальными и граничными условиями привели к линейной задаче Коши (5).
Рассмотрим интегрирование системы линейных обыкновенных дифференциальных уравнений второго порядка в перемещениях с начальными условиями.
Для интегрирования уравнения (5) конечноэлементным вариантом метода Галеркина приведем его к следующему виду
 ,
,  . (6)
. (6)
Интегрируя по временной координате соотношение (6) с помощью конечноэлементного варианта метода Галеркина, получим двумерную явную двухслойную конечноэлементную линейную схему в перемещениях для внутренних и граничных узловых точек
 ,
,
 , (7)
, (7)
где  – шаг по временной координате.
– шаг по временной координате.
Основные соотношения метода конечных элементов в перемещениях получены с помощью принципа возможных перемещений и конечноэлементного варианта метода Галеркина. Рассмотрим устойчивость двумерной явной двухслойной конечноэлементной линейной схемы в перемещениях для внутренних и граничных узловых точек на квазирегулярных сетках. Система уравнений (5) для внутренних и граничных узловых точек, полученная в результате интегрирования уравнения движения теории упругости, должна давать решение, сходящееся к решению исходной системы (1).
Шаг по временной переменной  определяем из следующего соотношения
определяем из следующего соотношения
 ,
,  , (8)
, (8)
где  – длина стороны конечного элемента.
– длина стороны конечного элемента.
Результаты численного эксперимента показали, что при k = 0,5 обеспечивается устойчивость двумерной явной двухслойной конечноэлементной линейной схемы в перемещениях для внутренних и граничных узловых точек на квазирегулярных сетках.
На основе метода конечных элементов в перемещениях разработаны алгоритм и комплекс программ для решения линейных плоских двумерных задач, которые позволяют решать сложные задачи при нестационарных динамических воздействиях на сооружения. При разработке комплекса программ использовался алгоритмический язык Фортран-90.
Некоторая информация о достоверности моделирования волн напряжений в деформируемых телах приведена в следующих работах [1–5, 8–10].
Решение задачи о сосредоточенном упругом взрывном воздействии
В упругой полуплоскости от сосредоточенного воздействия распространяются продольные, поперечные, рэлеевские и конические волны. Они распространяются с разной скоростью. В работе [7] приведена информация о численном решении задачи Лэмба. Рассмотрим задачу о воздействии сосредоточенной волны в виде дельта функции (рис. 3) перпендикулярной свободной поверхности упругой полуплоскости (рис. 2). В точке B перпендикулярно свободной поверхности  приложено упругое нормальное напряжение
приложено упругое нормальное напряжение  (рис. 3), которое при
(рис. 3), которое при 
 изменяется линейно от 0 до P, а при
изменяется линейно от 0 до P, а при  от P до 0 (
от P до 0 ( ,
,  МПа (–1 кгс/см2)).
МПа (–1 кгс/см2)).
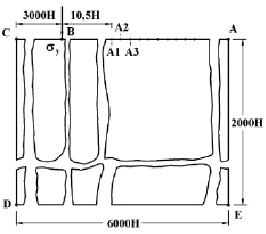
Рис. 2. Постановка задачи о воздействии сосредоточенной волны в виде дельта функции на свободной поверхности упругой полуплоскости
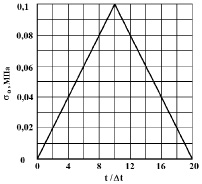
Рис. 3. Воздействие типа дельта функции
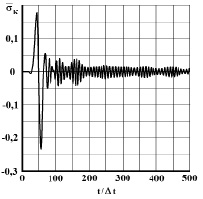
Рис. 4. Изменение упругого контурного напряжения  во времени
во времени  в точке A1
в точке A1
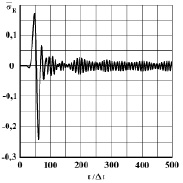
Рис. 5. Изменение упругого контурного напряжения  во времени
во времени  в точке A2
в точке A2
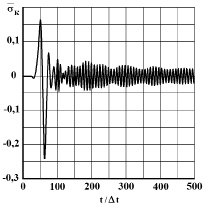
Рис. 6. Изменение упругого контурного напряжения  во времени
во времени  в точке A3
в точке A3
Граничные условия для контура CDEA при 
 . Отраженные волны от контура CDEA не доходят до исследуемых точек при
. Отраженные волны от контура CDEA не доходят до исследуемых точек при  . Контур ABC свободен от нагрузок, кроме точки B, где приложено сосредоточенное упругое нормальное напряжение
. Контур ABC свободен от нагрузок, кроме точки B, где приложено сосредоточенное упругое нормальное напряжение  .
.
Расчеты проведены при следующих исходных данных:  ;
;  = 1,393⋅10-6 с; E = 3,15⋅10 4 МПа (3,15⋅10 5 кгс/см2);
= 1,393⋅10-6 с; E = 3,15⋅10 4 МПа (3,15⋅10 5 кгс/см2);  = 0,2;
= 0,2;  = 0,255⋅104 кг/м3 (0,255⋅10-5 кгс с2/см4);
= 0,255⋅104 кг/м3 (0,255⋅10-5 кгс с2/см4);  = 3587 м/с;
= 3587 м/с;  = 2269 м/с. Решается система уравнений из 48032004 неизвестных.
= 2269 м/с. Решается система уравнений из 48032004 неизвестных.
На рис. 4–6 показано изменение упругого контурного напряжения  (
( ) во времени n в точках A1–A3 (рис. 2), находящихся на свободной поверхности упругой полуплоскости (расстояние между точками: A1 и A2 равно H; A2 и A3 равно H).
) во времени n в точках A1–A3 (рис. 2), находящихся на свободной поверхности упругой полуплоскости (расстояние между точками: A1 и A2 равно H; A2 и A3 равно H).
Вывод
Амплитуда поверхностных волн Релея существенно больше амплитуд продольных, поперечных и других волн при воздействии перпендикулярного сосредоточенного воздействия в виде треугольного импульса на поверхности упругой полуплоскости.
Библиографическая ссылка
Мусаев В.К. МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ ПОВЕРХНОСТНЫХ ВОЛН НАПРЯЖЕНИЙ В ЗАДАЧЕ ЛЭМБА ПРИ ВОЗДЕЙСТВИИ В ВИДЕ ДЕЛЬТА ФУНКЦИИ // Международный журнал прикладных и фундаментальных исследований. 2015. № 2-1. С. 25-29;URL: https://applied-research.ru/en/article/view?id=6368 (дата обращения: 21.07.2026).