
Scientific journal
International Journal of Applied and fundamental research
ISSN 1996-3955
ИФ РИНЦ = 0,556
MICROPOWER FREQUENCY INTEGRATES DEPLOYS CONVERTER PARAMETERS FOR RESISTANCE TEMPERATURE DETECTOR INFORMATION AND MEASURING SYSTEMS

Эффективность любых новых применений методов интегрирующего развертывающего преобразования (ИРП) обусловлена их технической простотой. По этому показателю, а также по помехоустойчивости и точности методы ИРП находятся вне конкуренции наряду с другими методами построения цифровых средств измерения, что определяет предпочтительность их применения во всех случаях, когда обеспечивается требуемое быстродействие [3].
Важным направлением, связанным с решением задач, стоящих перед специалистами информационно-измерительной техники, является разработка методов и средств преобразования параметров резистивных датчиков в частотный сигнал.
Актуальность решения этой задачи обусловлена, с одной стороны, широкой номенклатурой резистивных датчиков, которые используются для измерения разнообразных физических величин (перемещений, механических напряжений, температуры и т.д.), и, с другой стороны, преимуществами частотного представления информации с точки зрения помехоустойчивости, передачи информации по линиям связи, обработки и преобразования в код [4].
Данное направление в информационно-измерительной технике интенсивно развивается, что подтверждается большим количеством публикаций по данному вопросу в отечественной и зарубежной литературе.
В настоящее время существует множество методов для измерения температуры, но самым распространённым является измерение температуры с помощью датчиков, а в частности, с помощью резистивных датчиков измерения температуры.
Основные трудности при построении частотного ИРП (ЧИРП) параметров резистивных датчиков связаны с решением следующих основных проблем:
Обеспечение минимально допустимой погрешности нуля.
Обеспечение минимально допустимой погрешности чувствительности.
Рациональное сопряжение измерительной цепи (ИЦ) со схемой преобразователя.
Минимальное потребление мощности, при использовании в приборах с автономным энергопитанием (от солнечных элементов или аккумуляторов).
При этом не менее актуальными остаются проблемы поиска путей структурного совершенствования ЧИРП для получения высоких метрологических характеристик, высокой помехоустойчивости и упрощения схемной реализации.
Температура является одним из важнейших параметров, как при проведении лабораторных экспериментов, так и технологических процессов многих отраслей промышленности.
Изначально создание маломощных и микромощных операционных усилителей (МОУ) было вызвано необходимостью уменьшить ток потребления устройств, содержащих большое число ОУ. Поэтому к разработанным более 15 лет назад и до сих пор выпускаемым усилителям µALM4250, 153УД4, 154УД1, 140УД12, в настоящее время добавились ещё более ста различных ОУ, выпускаемых ведущими мировыми производителями [5]. Причём качество их разработки настолько возросло, что МОУ можно встретить и среди прецизионных усилителей, и среди ОУ с малыми выходными токами [1].
Микромощные усилители используются в приборах, получающих питание от гальванических или аккумуляторных батарей. Эти усилители потребляют очень малый ток от источников питания. Для того, чтобы дать возможность проектировщику найти компромисс между малым потреблением и низким быстродействием, некоторые модели микромощных ОУ выполняют программируемыми [1].
На данный момент при проектировании автономных информационно-измерительных систем (ИИС) возникает необходимость введения микромощных датчиков измерения температуры с простым схемотехническим решением, возможностью автономного питания, сбором и обработкой информации и способностью передачи полученной информации на большие расстояния.
На рис. 1 представлена структурная схема датчика измерения температуры с частотным выходным сигналом, содержащего источник питания (ИП), преобразователь напряжения в ток (ПНТ), преобразователь напряжения в частоту (ПНЧ), состоящий из интегратора (ИНТ) и сравнивающего устройства (СУ), и резистивный датчик температуры (Д), питающийся от преобразователя напряжения в ток (ПНТ).
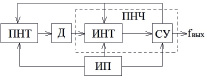
Рис. 1. Структурная схема частотного преобразователя параметров резистивных датчиков температуры
С помощью компьютерного моделирования в программе MicroCap была смоделирована схема частотного преобразователя на микромощных операционных усилителях типа 154УД3А, 140УД17, 140УД12 и 153УД4 (рис. 2).
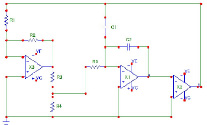
Рис. 2. Принципиальная электрическая схема ЧИРП
В состав ЧИРП входит: резистивный датчик температуры (R4), преобразователь напряжения в ток, состоящий из инвертирующего усилителя напряжения (X3) и резистора нагрузки R3, сопротивление которого, не менее чем на два порядка, превышает сопротивление датчика R4, интегратор на базе операционного усилителя (Х1) с емкостной отрицательной обратной связью С2 и дополнительным (дозирующим) конденсатором С1 и сравнивающее устройство - компаратор (Х2). Питание датчика осуществляется двухполярным напряжением питания типа "меандр" с выхода сравнивающего устройства через инвертирующий преобразователь напряжения в ток.
Функция преобразования данного измерителя температуры имеет следующий вид:
 ,
,
где Rд – сопротивление датчика температуры, а K – коэффициент преобразователя напряжения в ток, имеющий размерность [1/Ом∙с] и определяемый соотношением
 ,
,
при условии, что R3 >> R4.
Чувствительность, начальную частоту и диапазон изменения выходной частоты можно устанавливать с помощью элементов схемы С1, R5 и резисторов R1, R2 и R3 соответственно.
При использовании резистивных датчиков температуры измерение температуры, как правило, проводится на основании изменения электрического сопротивления от температуры [2]. В зависимости от типа выбранного датчика, его сопротивление может изменяться в диапазоне температур в разных пределах. В данном случае сопротивление датчика температуры (фирмы Honeywell) R4 изменялось от 1584 до 3030 Ом при изменении температуры от - 40 до 140 oС, как показано в таблице 1 и на рис. 3.
Таблица 1
Значения Rд от t
|
Температура, С |
Сопротивление, Ом |
|
-40 |
1584 |
|
-20 |
1715 |
|
0 |
1854 |
|
20 |
2000 |
|
40 |
2153 |
|
60 |
2314 |
|
80 |
2482 |
|
100 |
2658 |
|
120 |
2840 |
|
140 |
3030 |
Для сведения к минимуму возможности внутреннего нагрева датчика рекомендуется, чтобы измерения сопротивления проводилось при максимальном токе равным 100 мА или менее. Измерение сопротивления с токами до 1 мА не повредит датчик, но характеристики сопротивления должны быть скорректированы с учетом внутреннего нагрева. В данной схеме величина тока датчика не превышала 50 мкА.
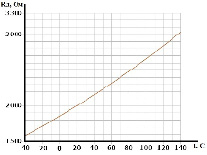
Рис. 3. График зависимости сопротивление датчика от температуры
Ниже представлена таблица значений выходной частоты ЧИРП, собранных на разных типах операционных усилителей, от изменения сопротивления датчика при указанных заданных значениях температуры датчика (табл. 2).
Таблица 2
Значения выходной частоты ЧИРП от изменения сопротивления датчика
|
T, oC |
R, Ом |
fвых |
|||
|
154УД3А |
140УД17 |
140УД12 |
153УД4 |
||
|
-40 |
1584 |
13309 |
9985 |
8407 |
15815 |
|
-20 |
1715 |
14095 |
10476 |
8742 |
16904 |
|
0 |
1854 |
14874 |
10968 |
9070 |
17997 |
|
20 |
2000 |
15695 |
11455 |
9387 |
19104 |
|
40 |
2153 |
16496 |
11930 |
9692 |
20284 |
|
60 |
2314 |
17319 |
12405 |
9988 |
21893 |
|
80 |
2482 |
18121 |
12872 |
10272 |
22544 |
|
100 |
2658 |
18929 |
13331 |
10545 |
23771 |
|
120 |
2840 |
19705 |
13777 |
10805 |
25009 |
|
140 |
3030 |
20468 |
14216 |
11054 |
26302 |
По результатам таблицы были построены графики зависимости частоты выходного сигнала ЧИРП от изменения сопротивления датчика от 1584 до 3030 Ом (Рис. 4).
Как видно из графика, при изменении сопротивления датчика в заданном диапазоне температур и конкретных значениях C и R схемы (C1=12пФ, R1=10кОм, R2=5кОм, R3=100кОм, R5=9кОм), которые входят в функцию преобразования (1), максимальная девиация частоты в схеме, собранной на ОУ 153УД4, составляет порядка 10,5 кГц, а минимальная девиация частоты для схемы на ОУ 140УД12 составляет порядка 2,7 кГц.
Для получения необходимых значений частоты в заданных выше пределах и соответствующем диапазоне температур, можно регулировать значения C и R схемы. Так, при значениях C1=12пФ, R1=10кОм, R2=5кОм, R3=150кОм, R5=9кОм, максимальная девиация частоты (на ОУ 153УД4) составила порядка 5,5 кГц, а минимальная (на ОУ 140УД12) - 2,5 кГц.
Как видно из функции преобразования (1) ЧИРП, выведенной для ОУ с идеальными характеристиками, напряжение питания не оказывает влияния на выходную частоту преобразователя. Однако, как показали экспериментальные исследования, с изменением напряжения питания изменяются основные характеристики операционных усилителей (коэффициент усиления, смещения нуля, полоса пропускания и т.д.), в результате чего незначительно изменяется частота выходного сигнала.
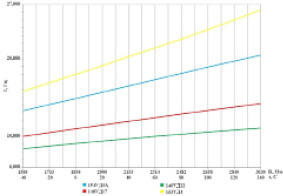
Рис. 4. Графики зависимости выходной частоты от изменения сопротивления датчика
Ниже представлена таблица изменения выходной частоты ЧИРП, собранных на различных типах ОУ, в зависимости от приложенного напряжения питания при заданных начальных значениях частоты 5 и 10 кГц.
Таблица 3
Значения выходной частоты от напряжения питания
|
Uпит, В |
10 кГц |
5 кГц |
||||||
|
154УД3А |
140УД17 |
140УД12 |
153УД4 |
154УД3А |
140УД17 |
140УД12 |
153УД4 |
|
|
9 |
10058 |
10155 |
11695 |
10512 |
4886 |
4986 |
5229 |
4902 |
|
10 |
10077 |
10041 |
11097 |
10513 |
4949 |
4964 |
5151 |
4939 |
|
11 |
10076 |
9926 |
10535 |
10497 |
4980 |
4943 |
5053 |
4969 |
|
12 |
10070 |
9808 |
10014 |
10463 |
4999 |
4921 |
4949 |
4988 |
|
13 |
10062 |
9688 |
9535 |
10457 |
5011 |
4898 |
4842 |
5005 |
|
14 |
10062 |
9572 |
9094 |
10430 |
5017 |
4875 |
4736 |
5013 |
|
15 |
10051 |
9454 |
8688 |
10415 |
5018 |
4851 |
4631 |
5052 |
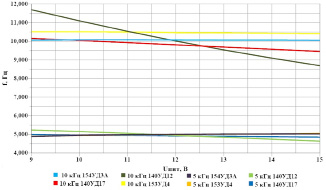
Рис. 5. Графики зависимости частоты выходного сигнала ЧИРП от приложенного напряжения питания в диапазоне от 9В до 15В
По результатам приведенной выше таблицы, были построены графики изменения выходной частоты ЧИРП от изменения напряжения питания (Рисунок 5) в диапазоне от 9-15В (при номинальном значении напряжения питания 12В), т.е. на ±25%.
Как видно из графиков, схема, собранная на 140УД12, более чувствительна к изменению напряжения питания и диапазону выходных частот. Относительная погрешность преобразования в зависимости от изменения напряжения питания на ±25% от номинального для схемы, выполненной на ОУ типа 154УД3А и 140УД17 и 153УД4, не превышала 3,5%, а для схемы, собранной на ОУ типа 140УД12 – до 15%.
В качестве рекомендаций можно предложить использование частотных преобразователей, выполненных на микромощных ОУ, на более низких частотах (порядка единиц кГц) и отклонении напряжения питания от номинального не более чем на 10%. При этом общий ток потребления ЧИРП собранных на ОУ типа 154УД3А и 140УД17 может составить величину порядка 20 мА, на ОУ типа 153УД4 порядка 900мкА, а на ОУ 140УД12 - 40-50 мкА.
Библиографическая ссылка
Громков Н.В., Жоао А.Ж. МИКРОМОЩНЫЙ ЧАСТОТНЫЙ ИНТЕГРИРУЮЩИЙ РАЗВЕРТЫВАЮЩИЙ ПРЕОБРАЗОВАТЕЛЬ ПАРАМЕТРОВ РЕЗИСТИВНЫХ ДАТЧИКОВ ТЕМПЕРАТУРЫ ДЛЯ ИНФОРМАЦИОННО-ИЗМЕРИТЕЛЬНЫХ СИСТЕМ // Международный журнал прикладных и фундаментальных исследований. 2015. № 9-1. С. 18-22;URL: https://applied-research.ru/en/article/view?id=7430 (дата обращения: 01.07.2026).