
Scientific journal
International Journal of Applied and fundamental research
ISSN 1996-3955
ИФ РИНЦ = 0,556
CONTROL OF MULTIPARAMETRIC PSYCHOPHYSIOLOGICAL STATE OF FLIGHT CREW

Результаты анализа авиационных происшествий последних 20-ти лет показывают, что 80 % связаны с человеческим фактором. Вследствие этого, обеспечение функциональной надежности летного состава является одной из актуальных задач в этой области. Для обеспечения функциональной надежности летного состава применение метода биологической обратной связи (БОС) позволяет проводить не только психокоррекцию, но и идентификацию состояния по степени управляемости, и прогнозирование по степени надежности функционирования в экстремальных условиях [7, 8]. Реализация вышеуказанных задач требует разработки интерактивной системы с алгоритмом принятия решения в условиях неопределенности.
Анализ управляемости психофизиологическими состояниями (ПФС) человека и определение индивидуального алгоритма самоорганизации в рамках БОС-метода, являясь актуальной проблемой экологической физиологии [3], перспективен не только для прогнозирования состояния в экстремальных ситуациях, но и для повышения функциональных резервов организма. Использование нейродинамических процессов (НП) в качестве, как центрального звена в обеспечении управления ПФС с помощью БОС-методики всесторонне обосновано в школе проф. Н.Н. Василевского [4].
Методика
Отсутствие в настоящее время унифицированного метода идентификации ПФС и единого подхода информационного обеспечения для применения функционального БОС-метода с целью управления, проявляется в многообразии различных эвристических подходов в данной области.
Для реализация предложенного варианта мультипараметрической БОС-методики требуется решение ряда задач:
- формализация выбранного уровня описания ПФС (нейродинамический);
- формализация «желаемого состояния» в ПФС в виде нечеткого множества в многомерном пространстве («нейродинамический портрет»);
- формализация многокритериальной задачи;
- с помощью скалярной свертки (аддитивной или мультипликативной) переход к последовательностям однокритериальных задач;
- проектирование и синтез интерактивной системы позволяющей в диалоговом режиме поэтапно решать многокритериальные задачи.
Опираясь на концепцию биоритмологической организации основных ритмов мозга и вероятностно-детерминационной структуры нейродинамических процессов, формируется нейродинамический портрет («НП») (рис. 1):
- степень детерминации общей организации;
- вектор количественных показателей, отражающих детерминирующую роль локальных компонентов в общей организации;
- вектор вероятностно потоковых характеристик.
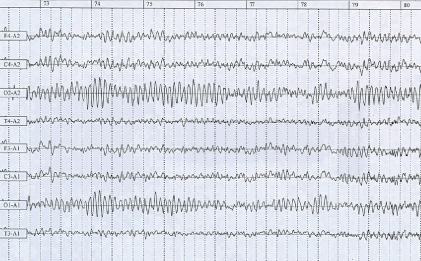
а
б
Рис. 1. а – сегмент многоканальной ЭЭГ; б – биоритмологическая структура НП
ЭЭГ-сегмент аппроксимируется последовательностями цепей отдельных ритмов мозга, на основе которого вычисляется триада <П, Д(P), F(П)>. П – стохастическая матрица, каждый элемент которого, является условными вероятностями чередований основных ритмов мозга. Д(P):=<K, K1, K2, ..., Km> – комплекс степени детерминации ЭЭГ-процесса, определяется следующим образом: K = min{к:[Pk – Pk+1] < e}. Ki – отражает роль i-го компонента, который определяется после исключения соответствующей строки и столбца из исходной стохастической матрицы и вычисляется степень детерминации полученной матрицы. Сравнивая K с Ki можно говорить об детерминационной роли соответствующего локального компонента в общей организации. Например, если K > Ka, то можно говорить о детерминирующей роли a-компонента.
Ф(П):= <Fd, Fq, Fa, Fb> показывает потоковые характеристики определяемые формулой Fa = 1 – ΣПia.
Алгоритмические обеспечение
Для идентификации ПФС нами выбраны динамические характеристики НП.
Для алгоритмизации идентификационного процесса, как отображения ПФС на основе НП, требуется формирование пространства функциональных состояний с соответствующей топологией [1]. Но в связи с отсутствием априорного знания о метрической структуре этого пространства необходимо снабжение управляющего блока модулем-«адаптером», выполняющим задачу поэтапного определения пространства функциональных состояний с соответствующей метрикой. В процессе идентификационного управления ПФС на основе НП, результаты функционирования этого блока частично будут отражать внутренний алгоритм самоорганизации.
Для формализации целевой задачи биотехнической системы (БТС) целесообразно ввести понятие «желаемое состояние» в виде нечеткого множества в ПС.
Эффективное управление ПФС зависит не только от компонентов и их взаимоотношений, но и от оптимизации информационных процессов в единой БТС.
Методологическая основа проектирования и синтеза БТС разработанная В.М. Ахутином [2] дает возможность самоорганизации биологического объекта, где адаптивное звено находится также и вне управляемого объекта.
Обозначим через {Ki}i=1,…,n совокупность параметров «НП». Каждому Ki соответствует нечеткое множество Ki: = < Rn, μ1(Ki) > [6]. Функцию принадлежности каждого множества можно вычислить на основе интерполяции эмпирических данных. На основе длительного наблюдения можно вычислить как условные, так и безусловные вероятности, как характеристику устойчивости реализации каждого состояния, границы ПС, так и виды траектории при переходе из одного состояния в другое.
Задача БТС формируется как многокритериальная задача [5]:

где μ1: Rn → [0, 1]
или U(μ1(K), μ2(K), …, μn(K)) → max,
где U – неявный вид глобальной функции предпочтений.
Наличие двух видов неопределенностей, связанных с отсутствием информации как индивидуальных, так и общих механизмов самоорганизации, отражается в априорной неопределенности целевой функции БТС. Для решения этой задачи нами предполагается синтетическое использование двух подходов к решению многокритериальной задачи.
Аддитивное свертывание приводит векторную функцию (μ1(K), μ2(K) ,…, μn(K)) к скалярной  (функция достижимости) «желаемого состояния» в ПС.
(функция достижимости) «желаемого состояния» в ПС.
Введем произвольно априорно неизвестные параметры (весы) αi ∈ [0, 1], 
Тогда глобальная целевая функция БТС принимает вид:


Нечеткое множество Gα := <Rn, μα>, являясь линейной комбинацией локальных нечетких множеств, находится между максимальной и минимальной оболочкой этих множеств, коэффициенты которых как отражение управляемости компонентов определяются в рекурсивном процессе.
Постэкспериментальный протокол, отражающий динамику состояний БТС Si := <αi, Ki> ∈ R2n, сохраняет в себе технический компонент –ТС := {αi} ∈ Rn, информацию об управляемости соответствующих параметров. Для нахождения адекватного мультипараметра α применяется многоэтапная процедура. Управляемость каждого Ki определяется изменчивостью αi данного параметра Ki, оцениваясь по предыстории настоящего состояния.
Динамика биологического компонента БС := {Ki} ∈ Rn, сохраняет в себе информацию самоорганизации при адаптивном управлении.
Техническое обеспечение
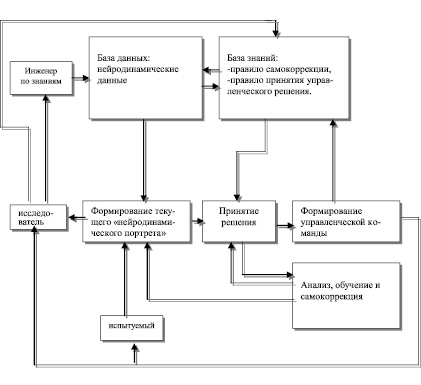
Рис. 2. Структурно-функциональная схема интерактивной системы
На рисунке (рис. 2) представлена структурно-функциональная схема предлагаемой интерактивной системы, которая состоит из следующих основных функциональных узлов:
- формирование текущего «НП»;
- принятие решения;
- формирование управленческой команды;
- база данных;
- база знаний;
- анализ, обучение и самокоррекция.
В данном случае процесс мониторинга представляет собой как слежение за процессами обучения, так и самоорганизацию при методике БОС. Эффективность и надежность системы мониторинга психофизиологических состояний (МПС) человека как интеллектуальной системы, зависит от оптимизации информационных взаимоотношений компонентов, которые образуют единую целенаправленную систему.
При проектировании и синтезе интеллектуального МПС, ко всем ее компонентам, в том числе «интеллектуальным датчикам» (ИД) предъявляется ряд ограничений и требований, связанных с пятью взаимосвязанными процессами, которые характеризуют интеллектуальные системы (ИС):
мотивация, самоорганизация, адаптация, самообучение, развитие ИС.
Роль ввода и первичной обработки исходных данных играет портативное устройства на базе микроконтроллера серии PIC фирмы Micpochip в качества ИД МПС.
Заключение
Предложенная интерактивная система, функционирующая на основе идентификационного управления реализующего мультипараметрические БОС-методики, является перспективной для идентификации, прогнозирования и проведения психофизиологической коррекции летного состава.
Проведен автоматический кластерный анализ «НП» и выявлены типологические характеристики в виде комплекса вероятностно-детерминационных показателей ЭЭГ-процессов, психофизиологической структуры летного состава.
Система со своей гибкостью и функциональной открытостью позволяет решать множество поставленных управленческих задач, в зависимости от выбора параметра из различных уровней стратифицированных описаний иерархических структур ПФС человека.
Разработаны алгоритмы принятия решения при наличии неопределенностей нечеткого характера для оценки психофизиологического состояния, для прогнозирования состояния летного состава.
Предложенный подход позволяет эффективно управлять мультипараметрическими ПФС, учитывая индивидуальные особенности:
1. Определяет психофункциональный резерв организма, на основе управляемости ПФС.
2. Позволяет выявить алгоритм самоорганизации при управлении состояниями, на основе протокола процесса управления.
Библиографическая ссылка
Дадашев Ф.Г., Аллахвердиев А.Р., Агаев С.Р., Дадашева К.Г. УПРАВЛЕНИЕ МУЛЬТИПАРАМЕТРИЧЕСКИМИ ПСИХОФИЗИОЛОГИЧЕСКИМИ СОСТОЯНИЯМИ В ОБЕСПЕЧЕНИИ ФУНКЦИОНАЛЬНОЙ НАДЕЖНОСТИ ЛЕТНОГО СОСТАВА // Международный журнал прикладных и фундаментальных исследований. 2016. № 2-2. С. 192-196;URL: https://applied-research.ru/en/article/view?id=8549 (дата обращения: 15.07.2026).