

В системах управления моментными электродвигателями с постоянными магнитами широкое применение находят различные измерительные преобразователи угловых и линейных перемещений в электрический сигнал [1–4]. Зачастую к этим преобразователям предъявляются высокие точностные и эксплуатационные требования. Наибольшее распространение на практике получили индукционные преобразователи электромашинного типа с электрической редукцией. Они однозначно позволяют определить угол в пределах одного шага датчика. Таким образом, разработка новых элементов, повышение их точности и улучшение эксплуатационных характеристик являются наиболее актуальными задачами, а их наличие создает предпосылки для разработки современных прецизионных автоматических устройств.
Моделирование системы управления в приложении Simulink программного комплекса MATLAB
В настоящее время в системах управления электродвигателей с постоянными магнитами используются векторные алгоритмы управления моментом и скоростью вращения. В качестве управляющих сигналов на выходные переменные инвертора используются средние за период ШИМ значения фазных токов и напряжений двигателя, которые формируются во вращающейся декартовой системе координат (d, q), ось абсцисс которой (d) ориентирована по направлению продольной оси ротора. Значение тока якоря электродвигателя по поперечной оси q, пропорциональное электромагнитному моменту, задается с выхода регулятора скорости. Таким образом, в системе управления электродвигателя с постоянными магнитами реализуется известный принцип регулирования координат. Значение тока якоря по продольной оси d позволяет регулировать частоту вращения элетродвигателя выше основной с постоянством мощности. В системах управления электродвигателями с постоянными магнитами зачастую используются довольно сложные законы управления током по продольной оси машины, каждый из них имеет достоинства и недостатки [1–7].
На рис. 1 представлена функциональная схема системы управления электродвигателя с постоянными магнитами с непосредственной ориентацией вращающейся системы координат по положению ротора двигателя [2–4].
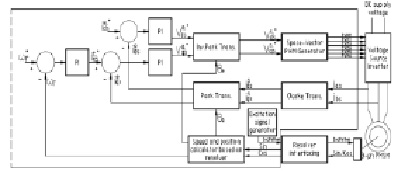
Рис. 1. Функциональная схема векторной системы управления электродвигателем с датчиком положения
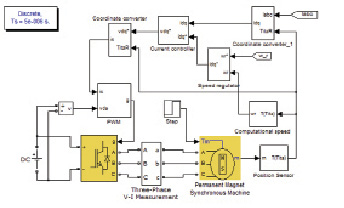
Рис. 2. Модель ВЭП переменного тока с датчиком положения ротора
При этом синусоидальная форма токов электродвигателя и компенсация пульсации момента позволит достичь максимальных диапазонов регулирования электропривода.
Для моделирования силовой части системы управления (управляемый инвертор) в приложении Simulink программного комплекса MATLAB воспользуемся стандартным боком «Universal Bridge». Данный блок моделирует универсальный мост, позволяя выбирать количество плеч моста (от 1 до 3) и вид полупроводниковых приборов (полностью управляемые тиристоры, IGBT и MOSFET транзисторы, шунтированные обратными диодами, а так же идеальные ключи).
Модель ВЭП переменного тока с датчиком положения ротора, разработанная в приложении Simulink программного комплекса MATLAB, представлена на рис. 2. Результаты моделирования представлены на рис. 3 и 4.
Разработка управляющей программы
Следующим этапом разработаны и реализованы основные функциональные блоки алгоритма управления электроприводом. Векторная система управления электродвигателем с постоянными магнитами позволяет управлять вращающим моментом и потокосцеплением аналогично двигателю постоянного тока. Другими словами, вращающий момент и потокосцепление управляются независимо друг от друга. Датчик положения ротора необходим для преобразования переменных из неподвижной системы координат в синхронно вращающуюся систему координат. В результате этого преобразования (преобразование Парка), ток по оси «q» будет управлять вращающим моментом, а нулевое задание тока по оси «d» обеспечивает минимизацию тока статора. Ключевую роль в данной системе управления выполняет датчик положения ротора (рис. 1).

Рис. 3. Изменение угловой частоты ω (рад/с)
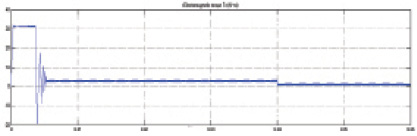
Рис. 4. Изменение электромагнитного момента Te (Н•м)
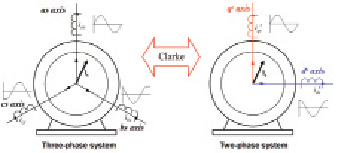
Рис. 5. Преобразование Кларка

Рис. 6. Преобразование Парка
Рассмотрим основные функциональные блоки.
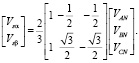
1. Преобразование Кларка (Clarke Transform) – предназначено для преобразования токов из трехфазной неподвижной системы координат в двухфазную неподвижную систему координат (рис. 5).
Данное преобразование описывается следующими уравнениями

2. Преобразование Парка (Park Transform) – предназначено для преобразования токов из двухфазной неподвижной системы координат во вращающуюся систему координат ориентированную по вектору потокосцепления ротора, где переменные преобразуются к системе постоянного тока (рис. 6).
Данное преобразование описывается следующими уравнениями

3. Обратное преобразование Парка (Inverse Park Transform) – предназначено для преобразования постоянных токов из вращающейся системы координат в двухфазную неподвижную систему координат.
Данное преобразование описывается следующими уравнениями
4. Цифровой ПИД регулятор с компенсацией интегрального насыщения (PI) – предназначен для автоматического поддержания заданного значения переменных (рис. 7). Может также использоваться для ПИ и ПД регулятора.
Алгоритм реализуется при помощи регулятора с передаточной функцией
5. Модуль пространственно-векторной широтно-импульсной (SV PWM) – предназначен формирования сигналов управления силовыми транзисторами инвертора. Выходное напряжение инвертора задается компонентами Ualpha и Ubeta.
Изготовление макета блока управления
Регулятор, описанный выше, реализован и проверен в макете блока управления, выполненном на двух печатных платах (инвертора и контроллера) с применением поверхностного монтажа. Выбор элементной базы системы управления осуществлялся в соответствии с известными методиками [8].
Питание обмотки моментного двигателя переменного тока осуществляется трехфазно-симметричной системой токов (напряжений), при этом используется ставшая уже стандартной силовая схема преобразователя электрической энергии на базе транзисторного инвертора напряжения. Благодаря управлению транзисторами инвертора в режиме модифицированной синусоидальной или пространственно-векторной широтно-импульсной модуляции (ШИМ) обеспечивается близкая к синусоидальной форма токов.
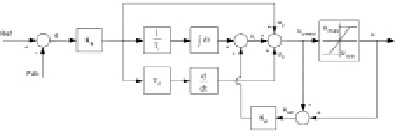
Рис. 7. Функциональная схема ПИД регулятора
Внешний вид макета блока управления представлен на рис. 8.
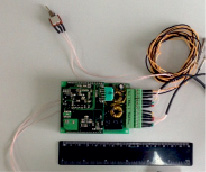
Рис. 8. Макет системы управления в сборе
Заключение
В ходе выполнения научно-исследовательской работы создана модель двигателя с постоянными магнитами и его системы управления в приложении Simulink программного комплекса MATLAB. Результаты моделирования двигателя и системы управления подтверждают корректность работы предложенной функциональной схемы.
Проработаны алгоритмы работы блока управления: разработана управляющая программа, математическое обеспечение блока управления электрического двигателя.
Изготовлен макет блока управления, позволяющий оценить эффективность работы электродвигателя, а также массогабаритные показатели электропривода в целом.
Данные исследования проведены при финансовой поддержке государства в лице Минобрнауки России (договор № 14.Z56.16.5570-МК).
Библиографическая ссылка
Лютаревич А.Г., Долингер С.Ю., Лохман Е.А., Панкрац Т.В., Жданова В.А. РАЗРАБОТКА СИСТЕМЫ ВЕКТОРНОГО УПРАВЛЕНИЯ МОМЕНТОМ ЭЛЕКТРОДВИГАТЕЛЯ С ПОСТОЯННЫМИ МАГНИТАМИ // Международный журнал прикладных и фундаментальных исследований. 2016. № 10-4. С. 529-533;URL: https://applied-research.ru/ru/article/view?id=10383 (дата обращения: 19.06.2026).