

Общей тенденцией развития современных электроприводов является их компьютеризация и применение электронной силовой преобразовательной техники. Однако преобразование самого силового элемента – рабочего органа механизма и его электродвигателя стоит в стороне.
Рассмотрены вопросы технологических конструкций электропроводов различных судовых механизмов, в том числе отличных от эксплуатируемых на судах. Единой целевой задачей предлагаемых решений является исключение промежуточных конструктивных элементов между рабочим органом механизма и электродвигателем, например, таковых как: валы, муфты, зубчатые передачи, трансмиссии из шкивов и ремней и прочего. Такие электроприводы получили общее название прямых или безтрансмиссионных. Указанное исполнение позволяет: уменьшить трудозатраты на изготовление электроприводов, экономить расходы на использование материалов, экономить затраты на расходные материалы, например, смазочные масла, повысить в целом коэффициент полезного действия электропривода в виду исключения потерь энергии на промежуточных элементах на трение и сокращения времени протекания динамических процессов (разгона, реверса, торможения) из-за уменьшения момента инерции. Приведем пример согласно патенту РФ [1].
Пример представлен на рис. 1. Он представляет собой конструкцию с обращенным синхронным электродвигателем с постоянными магнитами возбуждения. Цилиндрическая корпусная часть ротора двигателя может исполнять роль тягового барабана грузовой лебедки, крана, или ленточного транспортера перемещения сыпучих грузов. Наряду с этим эта же часть при изменении положения опоры может выполнять роль опорных роликов передвижения: тележек мостовых кранов, их мостов или всего портального крана.
Второй пример представлен на рис. 2–3. Он является по сути описанным выше электромагнитным движителем, но с использованием электрической редукции. Такая конструкция производится в качестве подруливающего устройства, серийно выпускаемой фирмой Brown Boveri, и она показана на рис. 4. Эта конструкция получила название кольцевой двигательно-движительной системы.
Следующим примером автоматизированного судового электропривода является винторулевая колонка с безвальным электромагнитным движителем, представленным на рис. 4.
Винторулевая колонка имеет безвальный винтолопастной движитель и механизм поворота плоскости вращения лопастей. Механизм поворота плоскости лопастей включает в себя два электродвигателя со встроенными электромагнитными тормозами и наружными шестернями, находящимися в зацеплении с косозубым коническим колесом, к которому жестко прикреплена станина винтолопастного электромагнитного движителя, служащая одновременно направляющей насадкой винта.
Данное устройство позволяет повысить качество функциональных возможностей устройства и его быстродействие, сократить время переходных процессов, повысить коэффициент мощности и полезного действия, снизить механические нагрузки на рабочие элементы зубчатой передачи.
Следует подчеркнуть,что во всех приведенных конструкциях в качестве источников возбуждения применены высокоэффективные постоянные магниты из сплава Nol-Fe-B [8]. Кроме этого для электроприводов, не регулируемых по скорости в электродвигателях реализуют принцип электрической редукции за счет правильного выбора соотношения числа полюсов ротора и зубцов сердечника статора.
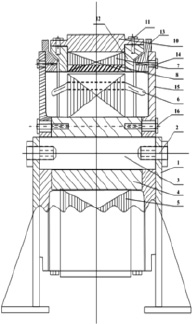
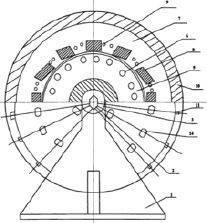
Рис. 1. Электродвигатель рабочего органа перегрузочной машины системы прямого привода
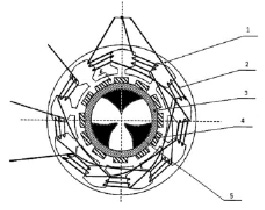
Рис. 2. Поперечный разрез электромагнитного движителя
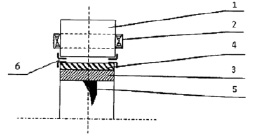
Рис. 3. Половина продольного разреза электромагнитного движителя
Возможен вариант без применения вспомогательного двигателя, но с использованием преобразователя частоты подключенного к сети частоты 50 Гц и питающего обмотку статора на частоте 5 Гц.
При снижении материалоемкости и сокращении эксплуатационных расходов предлагаем устройство, которое в реализации приведет, по оценке авторов, к повышению энергетической эффективности примерно в 3,5 раза при значениях η = 0,85 cosφ = 0,85.
Для большинства эксплуатируемых промышленных электроприводов в динамических процессах можно пренебречь электромагнитной частью переходного процесса и считать его чисто электромеханическим. Тогда интегрированием уравнения равновесия моментов в динамике можно будет определить дополнительное время переходного процесса из-за наличия дополнительных движущихся масс для электроприводов, не имеющих безтрансмиссионного привода и соответственно рассчитать дополнительные затраты электроэнергии.
Оценка влияния полных инерционных масс электропривода на продолжительность времени переходных процессов состоит в следующем. Время любого переходного процесса определяется путем решения системы уравнений. Для коллекторной машины постоянного тока с электромагнитным возбуждением или с таковым синхронной машины или асинхронной машины система уравнений всегда имеет три уравнения, а именно: два уравнения равновесия напряжений по цепям двух обмоток и одного уравнения равновесия моментов на валу машины. В простых, часто встречающихся случаях, когда переходный процесс идет с неизменным током цепи возбуждения, система уравнений упрощается до двух уравнений – одного равновесия напряжений по цепи обмотки якоря и второго равновесия моментов на валу машины. В этом случае при двух искомых неизвестных переменных – токе цепи якоря ia(t) и угловой скорости вращения якоря ω(t), решение всегда представляется в виде суммы двух решений: одного, как общего решения однородного уравнения (свободный режим) и второго, как частного решения неоднородного уравнения (принужденный режим). Однако, сам вид решения возможен в одном из трех вариантах, два из которых установившиеся и один неустановившийся. Последний получается, если действительные части комплексных корней характеристического уравнения будут положительными. Если корни будут комплексными, но с отрицательными вещественными частями, то процесс будет колебательным, но с получением установившегося режима. Если корни будут вещественными и отрицательными, то процесс будет установившемся экспоненциальным по характеру. Этот чаще всего встречающийся вариант получается когда выполняется неравенство Tэм > 4Ta, где  есть электромеханическая постоянная времени, а Ta = La/Rад есть электромагнитная постоянная времени, где La и Rад есть индуктивность обмотки якоря и активное сопротивление цепи якоря.
есть электромеханическая постоянная времени, а Ta = La/Rад есть электромагнитная постоянная времени, где La и Rад есть индуктивность обмотки якоря и активное сопротивление цепи якоря.
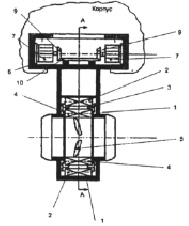
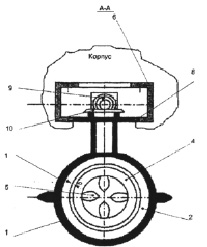
Рис. 4. Винторулевая колонка с безвальным электромагнитным движителем: 1, 6 – корпус, 2 – короткозамкнутая пусковая обмотка, 3, 8 – подшипник скольжения, 4 – шихтованный сердечник ротора, 5 – лопасти, 7 – электродвигатели, 9 – шестерни, 10 – косозубое коническое колесо
Для этого случая считают, что можно пренебречь электромагнитной частью переходного процесса и считать его чисто электромеханическим. Тогда для определения времени переходного процесса достаточно решить одно уравнение равновесия моментов на валу машины:
 (2)
(2)
в виде
 (3)
(3)
где JΣ суммарный приведенный к валу электродвигателя момент инерции.
Если взять пример реостатного способа пуска в ход электродвигателя (ЭД) грузовой лебедки или тележки крана, или всего крана, и полагать, что:
– mг, mб – массы груза и барабана лебедки;
– пуск (разгон) идет ступенями с числом k и на каждой ступени начальные и конечные скорости ЭД ωi и ω i + 1, νk – линейные скорости перемещения массы механизма;
– между валом ЭД и валом рабочего органа механизма имеется редуктор с числом ступеней j и на каждой ступени имеется момент инерции вращающихся частей Jj;
– рабочий орган механизма (например, барабан лебедки) имеет скорость вращения ωм;
– линейная поступательная скорость перемещения массы mмх полезной части механизма, например груза или тележки с грузом, или всего крана с грузом есть νмх,
то приведенный к валу электродвигателя момент инерции будет равен:
 (4)
(4)
где ij = ωj/ωд, ρk = νk/ωд, mмх = mг + mб для грузового барабана грузоподъемной лебедки; mмх = mг + mт для тележки крана с грузом; mмх = mг + mk для крана с грузом, mмх = mг + mc для грузовой стрелы с грузом.
Для выражений (2) и (3) имеются для каждого вида электродвигателя свои зависимости Mэм(ω) и для каждого вида механизма имеются свои зависимости статического момента Mс(ω) от скорости ω.
В частных случаях имеем:
– для механизма подъема, спуска груза  ;
;
– для механизма наматывающего устройства  ;
;
– для механизма вентилятора или центробежного нагнетателя  , где А, В – константы.
, где А, В – константы.
Из (6), (7) следует, что дополнительное время необходимое для создания движения рабочего органа из-за наличия дополнительных инерционных масс (валов, муфт, редукторов и прочего) составляет величину:
 (5)
(5)
Заключение
Предложенные конструкции электроприводов широкого класса перегрузочных механизмов машин и водного транспорта позволят существенно сократить: расходы материалов на изготовление, электроэнергии и масла при эксплуатации, а также трудозатраты.
Библиографическая ссылка
Уразов Ф.Ф., Поначевная С.А., Нещеретный Н.С. РЕСУРСОСБЕРЕГАЮЩИЕ ТЕХНОЛОГИИ СУДОВЫХ АВТОМАТИЗИРОВАННЫХ ЭЛЕКТРОПРИВОДОВ ПОДРУЛИВАЮЩИХ УСТРОЙСТВ, ВИНТОРУЛЕВЫХ КОЛОНОК, ПЕРЕГРУЗОЧНЫХ МЕХАНИЗМОВ // Международный журнал прикладных и фундаментальных исследований. 2016. № 10-4. С. 539-543;URL: https://applied-research.ru/ru/article/view?id=10385 (дата обращения: 19.06.2026).