

Работа относится к области пожаротушения и может быть использована при тушении пожаров в нефтегазовой отрасли, а именно – горящих фонтанирующих газонефтяных скважин.
В настоящее время разработка новых высокоэффективных способов и соответствующих технических устройств и систем для тушения горящих фонтанирующих газонефтяных скважин является одной из наиболее актуальных задач в нефтегазовой отрасли. Это обусловлено тем, что ни один из применяющихся сейчас способов тушения скважин не позволяет осуществлять тушение названных объектов достаточно оперативно с тем, чтобы максимально сократить потери нефти и природного газа.
Критический анализ существующих способов тушения скважин
В [1, 3] было предложено применять при тушении газонефтяных скважин так называемый факельный зонт. Непосредственное его назначение – локализация пламени путем подвешивания этого зонта над источником возгорания. Зонт формирует направленное движение горящих масс и сужает факел пламени за счет естественной тяги, обусловленной разностью давлений между низшей и высшей точками конструкции. Результатом применения такого устройства является следующее:
– сужаются границы области, окружающей факел пламени, в которой воздух нагрет до высокой температуры, и появляется возможность для приближения пожарной техники к очагу возгорания (т.е. к устью горящей скважины) на расстояние, необходимое для эффективной работы этой техники;
– появляется возможность для более точного определения визуальным путем границ очага возгорания (т.е. устья горящей скважины), скрытого факелом пламени, и тем самым для сокращения бесполезных затрат указанных веществ на ложное тушение области, примыкающей к горящей нефтегазовой скважине, визуально кажущейся зоной возгорания (особенно при распыленных и комбинированных формах струй пламени горящих нефтегазовых скважин), но в действительности не являющейся таковой.
Недостатком этого устройства (т.е. факельного зонта) является следующее:
– необходимость использования дополнительной техники: грузоподъемного крана для подъема и удержания факельного зонта над очагом возгорания; устройства, предназначенного для дождевания факельного зонта и др.;
– высокий расход воды при дождевании установки во избежание ее перегрева;
– громоздкость конструкции и большая масса факельного зонта, обуславливающие необходимость использования грузоподъемного крана значительной грузоподъемности и высоты, что приводит к увеличению финансовых затрат на изготовление всего комплекса устройств (зонта, подъемного крана, устройства дождевания и др.).
В [5, 6] описан мобильный пожарный робот LUF 60, предназначенный для пожаротушения (в том числе и для тушения газонефтяных скважин), корпус которого выполнен из огнестойких и жаропрочных материалов, снабженный емкостями для огнетушащих веществ и дистанционным управлением ходовой частью (с помощью радиосигналов), лафетным стволом и подачей огнетушащих веществ. Кроме того, робот оснащен системой охлаждения, обеспечивающей его защиту от перегрева вблизи источника возгорания. Данное устройство предназначено для обеспечения безопасности людей при тушении пожаров. Робот может использоваться как отдельно, так и в комплексе с другими аналогичными устройствами для повышения эффективности и сокращения времени процесса пожаротушения.
Недостатком мобильного пожарного робота LUF 60 является необоснованно высокий расход огнетушащих веществ, обусловленный невозможностью точного определения визуальным путем границ очага возгорания (т.е. устья горящей скважины), скрытого факелом пламени, и бесполезными затратами указанных веществ на ложное тушение областей, примыкающих к горящей нефтегазовой скважине, визуально кажущихся зоной возгорания (особенно при распыленных и комбинированных формах струй пламени горящих нефтегазовых скважин), но не являющихся таковыми.
Цель работы. Конечной целью данной работы является обеспечение минимального расхода огнегасящих веществ при тушении распыленных и комбинированных струй пламени горящих нефтегазовых скважин за счет максимально близкого и безопасного доступа к устью скважины пожарного робототехнического комплекса и точного определения визуальным путем границ очага возгорания (т.е. устья горящей скважины).
Решение поставленной задачи
Для решения поставленной задачи авторами этой работы предложено использовать при тушении горящих фонтанирующих газонефтяных скважин пожарный роботизированный комплекс, состоящий из двух мобильных роботов, каждый из которых имеет ходовую часть, корпус, выполненный из огнестойких и жаропрочных материалов, внутри которого имеются устройство дождевания робота, резервуар для воды, использующейся при дождевании, резервуар для огнетушащих веществ, лафетный ствол для подачи названных веществ в зону возгорания, а также индивидуальное дистанционное управление ходовой частью робота, его лафетным стволом и подачей через упомянутый ствол огнетушащих веществ к очагу возгорания. Кроме того, каждый мобильный робот оснащен постоянным электромагнитом, электропитание которого осуществляется по электрическому кабелю от электрогенератора постоянного тока, при этом у обоих роботов катушки электромагнитов включены согласованно, так что электромагниты обоих роботов создают сонаправленные магнитные поля [2].
Как известно, пламя обладает диамагнитными свойствами, т.е. пламя «выталкивается» из магнитного поля [4]. В основном диамагнитные свойства пламени, а также его светимость объясняются присутствием в нем во взвешенном состоянии раскаленных частиц углерода, еще не подвергшихся процессу окисления.
При горении нефтегазовой скважины под действием разности давлений в глубине скважины и на поверхности земли вектор силы, действующей на частицы пламени на границах факела, направлен под углом меньше 90° к горизонтальной поверхности, вследствие чего возникает распыленность струи пламени, затрудняющая определение визуальным путем границ устья горящей скважины.
Поскольку пламя обладает диамагнитными свойствами, то воздействие магнитного поля на пламя с внешней стороны факела в том или ином (одном) направлении на факел позволяет изменить форму последнего, заставив его отклониться в направлении, противоположном тому направлению, в котором действует магнитное поле, и увеличить угол названной выше силы, действующей на частицы пламени на границах факела, до значения 90° и даже более (при достаточно большом значении напряженности магнитного поля; [4]), в результате чего становится возможным точное определение визуальным путем как минимум одной из границ горящей скважины.
При этом соотношение сил, действующих на частицы пламени, обладающие диамагнитными свойствами, описывается следующим соотношением:
 , (1)
, (1)
где Fскв – сила, действующая на частицы пламени и обусловленная только разностью давлений в глубине скважины и на поверхности земли (т.е. сила, с которой происходит выброс горящей нефтегазовой смеси из скважины при отсутствии внешнего магнитного поля);
 ; (2)
; (2)
pскв – давление газонефтяной смеси в скважине; pвозд – давление на поверхности земли; Sскв – площадь устья скважины; φр.с. – угол распыленности скважины, зависящий от разности (pскв – pвозд), формы устья скважины и загроможденностью ее буровым оборудованием; FM – сила, порожденная внешним магнитным полем, создаваемым электромагнитами роботов пожарного робототехнического комплекса и действующая на частицы пламени, обладающие диамагнитными свойствами.
Сила FM определяется по формуле Гуи, которая имеет вид
 , (3)
, (3)
где χg – магнитная восприимчивость пламени (т.е. тех частиц пламени, которые обладают диамагнитными свойствами); m – масса частиц пламени, обладающих диамагнитными свойствами; H – напряженность магнитного поля, создаваемого электромагнитами роботов пожарного робототехнического комплекса; L – расстояние от исходной границы факела пламени (которая имела место до воздействия магнитного поля на пламя) до вертикальной плоскости, проходящей через точку на границе устья газонефтяной скважины, ближайшую к оси магнитного поля и параллельной последней.
Описание предлагаемого устройства реализации разработанного способа тушения скважин
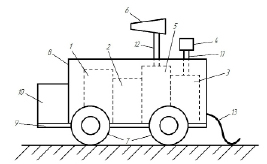
На рис. 1 показано устройство пожарных роботов, входящих в состав предлагаемого пожарного роботизированного комплекса (на примере одного робота; устройство второго робота идентично устройству первого), где 1 – блок приводов хода, подачи воды к устройству дождевания и подачи огнетушащего вещества к лафету, 2 – система управления перечисленными приводами, реализующая команды оператора робототехнического комплекса, посылаемые в виде радиосигналов, 3 – огнестойкий и жаропрочный корпус, 4 – платформа шасси, 5 – ходовая часть, 6 – резервуар с водой, 7 – устройство дождевания, 8 – трубопровод, предназначенный для подачи воды от емкости с водой 6 к устройству дождевания 7, 9 – резервуар с огнетушащим веществом, 10 – лафетный ствол, 11 – трубопровод, предназначенный для подачи огнетушащего вещества от емкости с огнетушащим веществом 9 к лафетному стволу 10, 12 – электромагнит, 13 – электрический кабель, защищенный оболочкой из огнестойкого и жаропрочного материала, по которому подается постоянный ток к обмотке электромагнита.
На рис. 2 показано расположение роботов комплекса в исходном (нерабочем) положении, где 1 – робот, 2 – лафетный ствол, 3 – электромагнит, 4 – кабель, 5 – генератор постоянного напряжения, 6 – пункт дистанционного управления.
На рис. 3 показано взаимное расположение роботов комплекса при выдвижении на боевую позицию для тушения горящей нефтегазовой скважины и конфигурация основных силовых линий суммарного магнитного поля, создаваемого постоянными электромагнитами роботов, где 1 – робот, 2 – лафетный ствол, 3 – электромагнит, 4 – кабель, 5 – генератор постоянного напряжения, 6 – пункт дистанционного управления, 7 – граница факела пламени, 8 – устье скважины, 9 – магнитное поле, создаваемое электромагнитами роботов.
На рис. 4 показано действие роботов комплекса на боевой позиции, где 1 – робот, 2 – лафетный ствол, 3 – электромагнит, 4 – кабель, 5 – генератор постоянного напряжения, 6 – пункт дистанционного управления, 7 – граница факела пламени, 8 – устье скважины, 9 – магнитное поле, создаваемое электромагнитами роботов, 10 – струи огнетушащего вещества, создаваемые лафетными стволами роботов, 11 – внешняя граница факела горящей нефтегазовой скважины, деформированная под действием суммарного магнитного поля, создаваемого постоянными электромагнитами роботов.
Предлагаемый в данной работе пожарный роботизированный комплекс используется следующим образом.
При отсутствии возгорания пожарные роботы занимают позицию, не затрудняющую производственные работы на скважине, но при этом обеспечивающую в случае необходимости боевое развертывание в кротчайшие сроки. При этом:
– сигналы управления роботами отсутствуют, в связи с чем блоки приводов и системы управления приводами, расположенные внутри огнестойких и жаропрочных корпусов роботов, размещенных на платформах шасси, выключены;
– приводы ходовых частей обоих роботов выключены;
– вода из резервуаров к устройствам дождевания по трубопроводам не подается;
– огнетушащее вещество из резервуаров к лафетным стволам по трубопроводам не подается;
– напряжение к обмоткам электромагнитов по электрическому кабелю не подается;
– никакие сигналы с пункта дистанционного управления не подаются;
– генератор постоянного напряжения выключен.
а
б
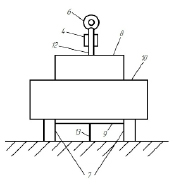
Рис. 1. Устройство пожарного робота: а – вид сбоку; б – вид спереди: 1 – блок приводов хода, подачи воды к устройству дождевания и подачи огнетушащего вещества к лафетному стволу; 2 – система управления приводами; 3 – корпус; 4 – платформа шасси; 5 – ходовая часть; 6 – резервуар с водой; 7 – устройство дождевания; 8 – трубопровод; 9 – резервуар с огнетушащим веществом; 10 – лафетный ствол; 11 – трубопровод; 12 – электромагнит; 13 – электрический кабель
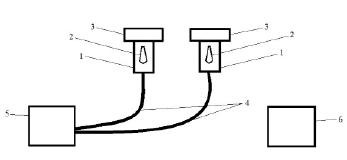
Рис. 2. Расположение роботов комплекса в исходном (нерабочем) положении: 1 – робот; 2 – лафетный ствол; 3 – электромагнит; 4 – кабель; 5 – генератор постоянного напряжения; 6 – пункт дистанционного управления
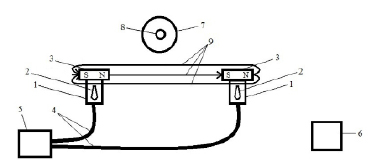
Рис. 3. Расположение роботов комплекса при выдвижении на боевую позицию: 1 – робот; 2 – лафетный ствол; 3 – электромагнит; 4 – кабель; 5 – генератор постоянного напряжения; 6 – пункт дистанционного управления; 7 – граница факела пламени; 8 – устье скважины; 9 – магнитное поле, создаваемое электромагнитами роботов
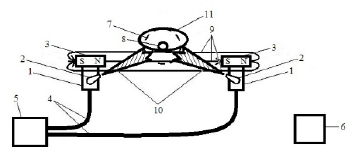
Рис. 4. Действие роботов комплекса на боевой позиции: 1 – робот; 2 – лафетный ствол; 3 – электромагнит; 4 – кабель; 5 – генератор постоянного напряжения; 6 – пункт дистанционного управления; 7 – граница факела пламени до воздействия на него магнитного поля; 8 – устье скважины; 9 – магнитное поле, создаваемое электромагнитами роботов; 10 – струя огнетушащего вещества; 11 – граница факела пламени после воздействия на него магнитного поля
При возгорании нефтегазовой скважины и образовании факела, имеющего форму распыленной или комбинированной струи пламени, роботы комплекса начинают выдвигаться на боевую позицию, как можно ближе к горящей скважине. По радиосигналу, посланному с пункта дистанционного управления, включается генератор постоянного напряжения, и по электрическим кабелям осуществляется электропитание обмоток электромагнитов роботов постоянным током, вследствие чего электромагниты создают сонаправленные магнитные поля, образующие в совокупности единое магнитное поле.
При этом управление роботами с пункта дистанционного управления осуществляется таким образом, что корпуса роботов во время их движения располагаются параллельно друг другу, на равном расстоянии от факела пламени, а оси электромагнитов постоянно находятся на одной линии. Огнетушащее вещество к лафетным стволам на этом этапе работы пожарного роботизированного комплекса не подается.
При вхождении роботов комплекса в зону высоких температур по сигналу, поданному с пункта дистанционного управления, вода из резервуаров по трубопроводам поступает к устройствам дождевания. Устройства дождевания включаются, корпуса роботов охлаждаются, вследствие чего роботы продолжают свою работу даже в зоне высоких температур, в непосредственной близости от факела пламени.
При дальнейшем приближении роботов к устью скважины, когда магнитное поле, создаваемое электромагнитами роботов, вступает во взаимодействие с факелом пламени, форма струи пламени деформируется, факел смещается в направлении, противоположном тому, откуда действует магнитное поле, и граница устья горящей скважины становится видна оператору роботизированного комплекса, находящегося на пункте дистанционного управления. Оператор с пункта дистанционного управления посылает сигналы, приводящие в действие приводы лафетных стволов, которые поворачиваются в направлении устья горящей скважины. Затем радиосигналами с пункта дистанционного управления включается подача огнетушащего вещества из резервуаров к лафетным стволам по трубопроводам. В результате огнетушащее вещество струями подается непосредственно в устье горящей скважины в объеме, необходимом для тушения пожара.
После этого соответствующими сигналами с пункта дистанционного управления подача огнетушащего вещества к лафетным стволам прекращается, роботы возвращаются в исходное положение, приводы хода выключаются, подача воды из резервуаров к устройствам дождевания по трубопроводам прекращается, генератор постоянного напряжения выключается. Пожарный роботизированный комплекс вновь готов к работе в случае повторного возгорания скважины.
Заключение
Технический результат, ожидаемый от практического применения предлагаемого пожарного роботизированного комплекса заключается в повышении автоматизации процесса тушения пожара, повышении безопасности труда пожарных, задействованных в тушении данного пожара (вследствие отсутствия необходимости их приближения к опасной зоне), а также в сокращении времени, необходимого для тушения пожара.
При этом технико-экономическая эффективность применения предлагаемого комплекса обусловлена:
– снижением расхода огнетушащего вещества, затрачиваемого на тушение пожара, поскольку это вещество в данном случае подается непосредственно к источнику возгорания;
– снижением потерь нефти и газа при их сгорании благодаря сокращению времени тушения пожара;
– улучшение экологии вследствие снижения выбросов углекислого газа и других продуктов сгорания, обусловленного сокращением времени, требующегося для тушения пожара.
Библиографическая ссылка
Масаев В.Н., Бражников А.В., Минкин А.Н., Булчаев Н.Д., Помолотова О.В., Азарникова В.А., Едимичев Д.А., Шарипов Д.А. РАЗРАБОТКА РОБОТИЗИРОВАННОГО ПОЖАРНОГО КОМПЛЕКСА ДЛЯ ТУШЕНИЯ НЕФТЕГАЗОВЫХ СКВАЖИН // Международный журнал прикладных и фундаментальных исследований. 2017. № 7-2. С. 185-190;URL: https://applied-research.ru/ru/article/view?id=11717 (дата обращения: 04.07.2026).