

Структура системы сбора (регистрации) информации слабо зависит от задач и района исследований, поскольку ее составляющие в любом случае должны обеспечивать накопление и отображение в реальном времени гидролокационной и навигационной информации.
Основные принципы построения системы сбора и отображения информации заключаются в том, что:
а) специализированная аппаратная часть системы сбора информации реального времени должна быть минимальна и содержать в основном цифровые устройства;
б) максимальная часть преобразований должна осуществляться в цифровом виде на серийных ПЭВМ;
в) на экране ПЭВМ должна в реальном времени отображаться гидролокационная и основная навигационная информация, а также может вестись вывод информации на графический самописец;
г) привязка гидролокационных данных к географическим координатам должна производиться через единое время ПЭВМ, синхронизированное с Гринвичским временем GPS;
д) к единому времени привязывается каждая точка изображения;
е) пользовательский интерфейс программы сбора информации реального времени должен отображать определенный необходимый минимум информации и позволять оператору управлять процессом сбора информации;
ж) помимо сквозной записи всей информации должна быть предусмотрена возможность оперативного запоминания изображений и координат особых обнаруженных объектов и явлений;
з) интерфейс навигационной программы должен отображать запланированный маршрут, путь судна и буксируемого носителя, текущие координаты судна и носителя, отклонение судна от запланированного маршрута.
Анализ результатов проведенных экспериментальных исследований позволяет обосновать следующий состав системы сбора данных, которая включает:
а) интерфейсный модуль, который сопрягает аналоговые или цифровые выходы и входы гидролокационных приборов, либо их судовых частей (глубоководный буксируемый аппарат) с той или иной шиной данных ПЭВМ (модуль обеспечивает ввод в ПЭВМ гидролокационной информации и синхронизацию работы гидролокационных приборов);
б) ПЭВМ сбора гидролокационной информации с периферией;
в) программное обеспечение реального времени, управляющее работой интерфейсного модуля и позволяющее собирать гидролокационную и, в случае необходимости, навигационную информацию в привязке ко времени на твердый диск ПЭВМ, выводить гидролокационные изображения на экран монитора ПЭВМ, либо полутоновой самописец, управлять через интерфейсный модуль работой гидролокационной аппаратуры;
г) полутоновой самописец, который позволяет в реальном времени вести непрерывную запись изображений на твердом носителе, что в ряде случаев бывает удобно для одновременного просмотра и сравнения больших участков записи;
д) качественный струйный или лазерный принтер как альтернатива использования полутонового самописца, на котором программным путем организуется «покадровая» распечатка гидролокационных изображений синхронно с их представлением на экране ПЭВМ;
е) навигационная ПЭВМ, собирающая под управлением соответствующего программного обеспечения данные, поступающие от гидроакустических и космических навигационных систем, отображающая на экране монитора навигационную обстановку и позволяющая вести проводку судна (подводного аппарата) по намеченному маршруту обследования.
При наличии на борту НИС современного навигационного оборудования космической навигации при работах на шельфе и мелководье без использования глубоководных аппаратов необходимость в навигационной ПЭВМ отпадает. Проводка судна по заданному маршруту выполняется судовыми средствами, а сбор навигационной информации для привязки гидролокационных данных без ее отображения может вестись ПЭВМ сбора гидролокационной информации.
Перечисленные положения и принципы были реализованы при построении в Лаборатории гидролокации дна Института океанологии РАН (ЛГД ИО РАН) систем сбора гидролокационной и батиметрической информации [1, 4], использовавшихся для исследования дна, подводных потенциально опасных объектов и экологических исследований [3, 2]. На рис. 1 изображена функциональная схема процесса сбора информации. Сбор информации, поступающей от ГБО, АП и навигационной системы, ведется на персональный компьютер (ПЭВМ) типа Notebook с использованием цифрового специализированного модуля ввода-вывода, который осуществляет преобразование сигналов и ввод их в ПЭВМ через параллельный порт (LPT) или порт USB. Навигационная информация вводится в ПЭВМ через USB или СОМ порт.

Рис. 1. Структура процесса сбора информации, для комплексов ЛГД ИО РАН: GPS – приемник КНС, ГБО-Л и ГБО–П – каналы ГБО левого и правого борта, АП – канал АП, 1, 2, 3 – антенны ГБО-Л, ГБО-П и АП
Работой аппаратуры управляет специализированная программа ЭхоГраф, разработанная для среды Windows98/XP. Программа осуществляет отображение информации, поступающей от двух каналов ГБО, канала АП или эхолота на экране монитора ПЭВМ в режиме движущегося окна, сохраняет информацию, в том числе навигационную, на жесткий диск ПЭВМ и синхронизирует работу ГБО и АП. Программа позволяет менять режимы работы аппаратуры (диапазон, усиление, частота квантования) и вести в реальном времени распечатку фрагментов изображений на принтере. Вид рабочего окна программы приведен на рис. 2.
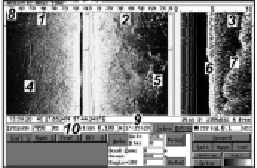
Рис. 2. Рабочее окно программы ЭхоГраф: 1 – изображение поверхности дна с левого, 2 – с правого борта; 3 – изображение разреза донных отложений (АП); 4 – следы якорных цепей; 5 – прибрежные выходы коренных пород; 6 – граница дна; 7 – граница поверхности коренных пород; 8 – рабочий диапазон; 9 – текущее время; 10 – текущие координаты
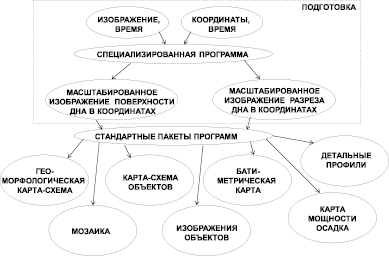
Рис. 3. Схема построения процесса обработки гидролокационной информации
Процесс обработки гидролокационной информации строится, исходя из требуемых отчетных материалов и задач исследований, и включает два этапа – подготовку данных и собственно обработку, что схематично представлено на рис. 3. Подготовка данных – это минимальная обработка, которая приводит данные к виду удобному для обработки стандартными пакетами программ. Итогом подготовки являются привязанные к географическим координатам масштабированные гидролокационные изображения поверхности дна с объектами и разрезы донных отложений в виде файлов данных, а также копии изображений на твердой основе (распечатки, мозаики), текстовые табличные файлы с массивами батиметрических данных, файлы координат контуров областей, природных и техногенных объектов.
На втором этапе ведется собственно обработка информации, целью которой является представление ее в виде, во-первых, удобном для анализа специалистами – экологами, спасателями, геофизиками, геологами, геоморфологами, а во-вторых, в виде, требуемом нормативными документами поисковых и гидрографических работ, инженерных и инженерно-геологических изысканий. При этом используются стандартные пакеты программ, такие как AUTOCAD, SURFER, GRAPHER, CORELDRAW и др.
Процесс подготовки, использующий специальное программное обеспечение, должен быть минимален. Такой подход делает процесс обработки в целом более гибким, позволяет не ограничиваться опциями, заложенными разработчиками специального программного обеспечения, с одной стороны, а с другой стороны, дает возможность специалистам-пользователям совершенствовать пути использования и представления информации самостоятельно. Последнее особенно актуально при обработке новых данных научных исследований.
В аппаратурном комплексе ЛГД ИО РАН этап подготовки информации реализуется с использованием специализированной оригинальной программы WINRASTR [5–7]. Программа WINRASTR в своей сути позволяет привязать к координатам каждую точку гидролокационных изображений и профилей зондирования, собранных и записанных на жесткий диск ПЭВМ с помощью программы реального времени ЭхоГраф.
Программа WINRASTR использует прямоугольные координаты, и, если сбор навигационной информации ведется в угловых координатах, последние предварительно конвертируются в координаты X,Y (для России в проекции Гаусса – Крюгера, эллипсоид Красовского 42), например, с помощью программы TRALINE. Программа WINRASTR позволяет просматривать сохраненные изображения поверхности и профилей дна, полученные с помощью ГБО и АП, на экране ПЭВМ и при загрузке навигационной информации (файлы *.nav) распечатывать масштабированные твердые копии этих изображений на принтере, а также сохранять их в формате *.bmp.
Результаты использования программы WINRASTR для обработки данных иллюстрируются на рис. 4. На рисунке представлено изображение разреза донного грунта, полученное с помощью акустического профилографа (АП) вдоль маршрута, проложенного в морской части эстуария реки Кемь. Разрез характеризуется расчлененной поверхностью подстилающих скальных пород, нивелированной осадочными отложениями мощностью до 12 метров. На рис. 4, б приведены графики, соответствующие изображению на рис. 4, а.
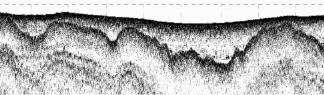
а)
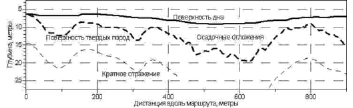
б)
Рис. 4. Результаты обработки данных акустического зондирования донных отложений (морская зона эстуария реки Кемь): а) масштабированное изображение профиля зондирования, сформированное с помощью программы WINRASTR; б) интерпретация изображения, выполненная с использованием программы SURFER
Вертикальные размеры форм рельефа, находящиеся в стороне от маршрута эхолотного промера, но попадающие в зону обзора гидролокатора, могут быть оценены по величине акустической тени этих форм на гидролокационном изображении. Высота объекта вычисляется по приближенной формуле
h = H×l/L,
где H – высота антенны гидролокатора над дном, l – длина акустической тени, L – наклонная дальность до конца акустической тени. Такая оценка может быть сделана вручную по твердой копии гидролокационного изображения. В рамках специальной опции программы WINRASTR процесс оценки высоты объектов автоматизирован. Объекты и их тени очерчиваются на экране монитора ПЭВМ с помощью манипулятора «мышь», программа рассчитывает высоты и образует файлы, содержащие координаты объектов и их высоты над дном, а в случае известного уровня уреза воды – абсолютные отметки.
При просмотре профилей акустического зондирования с помощью программы WINRASTR предусмотрена возможность создания файлов глубин водоема и файлов глубин залегания границ осадочных отложений, видимых на изображении в привязке к координатам или дистанции вдоль маршрута зондирования. Для этого видимый контур обводится курсором манипулятора «мышь» и сохраняется в файл. Файл содержит значения глубины H и координаты точек обозначенного на экране контура. Эти файлы используются для построения графиков глубины дна и границ раздела с помощью стандартных графических программ (SURFER, GRAPHER).
Представленные структура и методика функционирования системы сбора и обработки исследовательской гидролокационной информации включают этап подготовки информации с использованием специализированного программного обеспечения, а также последующую обработку пакетами программ общего назначения для приведения к виду удобному для анализа геологами, экологами, спасателями, и другими специалистами. При этом основными принципами построения системы являются:
а) минимизация специализированной аппаратной части системы реального времени и исполнение ее в основном на базе цифровых устройств;
б) максимальное использование в системах серийных цифровых устройств и ПЭВМ;
в) упрощение и минимизация процесса подготовки информации специализированными программами перед обработкой стандартными пакетами.
Дальнейшее совершенствование технологии обработки гидролокационной информации связано с внедрением программно-математического моделирования процесса формирования эхо-сигналов и гидролокационных изображений, соответствующих различным известным типам подводных объектов, в том числе потенциально опасных. Созданная модель, наполненная имеющимися натурными данными, будет включена в программный комплекс обработки гидролокационной информации реального времени для обеспечения оперативной идентификации объектов на ранних этапах поиска.
Библиографическая ссылка
Нерсесов Б.А., Римский-Корсаков Н.А. СТРУКТУРА СИСТЕМЫ ОБРАБОТКИ ИНФОРМАЦИИ, ПОЛУЧАЕМОЙ ПРИ ПОДВОДНЫХ ИНСТРУМЕНТАЛЬНЫХ ИССЛЕДОВАНИЯХ // Международный журнал прикладных и фундаментальных исследований. 2017. № 12-1. С. 137-141;URL: https://applied-research.ru/ru/article/view?id=11979 (дата обращения: 29.06.2026).
DOI: https://doi.org/10.17513/mjpfi.11979