

В настоящее время деятельность Института океанологии им. П.П. Ширшова РАН (ИО РАН) направлена на создание и внедрение сложных надводных и подводных приборов и аппаратов, а также технологий их применения в подводных исследованиях. В последние годы в ИО РАН разработаны и активно используются в разнообразных экспедиционных исследованиях рассмотренные ниже приборы и аппараты:
– ГНОМ – телеуправляемые необитаемые подводные аппараты (ТНПА) класса мини;
– ГБО – гидролокационные буксируемые, в том числе глубоководные комплексы;
– ГБК (гипербарические комплексы) – средства симуляции условий высокого гидростатического давления для исследований физиологических способностей человека и испытаний образцов подводной техники;
– «Лендер» – автономная донная станция, оборудованная комплексом гидрохимических и гидрофизических приборов и отборников проб;
– «Аквалог» – автономный исследовательский комплекс, проводящий вертикальное зондирование водной среды.
ГБО, ТНПА и ГБК являются традиционными направлениями разработок морской техники в ИО РАН. «Лендер» и «Аквалог» являются сравнительно новыми приборами, созданными в процессе выполнения Подпрограммы «Исследование природы Мирового океана» ФЦП «Мировой океан» в середине двухтысячных годов.
Важнейшая оригинальная разработка ИО РАН – это глубоководные обитаемые пилотируемые аппараты (ГОА) «Мир» [1], которые на протяжении десятков лет были и продолжают быть брендом Института и активно используются при проведении фундаментальных и прикладных экологических, а также научно-исследовательских работ в океане и на озере Байкал. ГОА «Мир» являются уникальной платформой для проведения глубоководных физических экспериментов и испытания новой техники. В настоящее время в России не существует других подводных средств, способных оперативно решать на предельных глубинах сложные нестандартные и экспериментальные задачи. Один из примеров уникальных экспериментов, осуществленных с помощью ГОА «Мир», – постановка донной станции «Лендер ИО РАН» на дно Байкала в 2009 году.
Разработка Института океанологии им. П.П. Ширшова – «Лендер ИО РАН». Является гидрохимической автономной донной станцией, которая создана для изучения химических потоков вещества на границе придонного слоя осадков [2]. Главным рабочим узлом лендера является донная камера (бокс), погруженная частично в грунт открытой частью. Придонная вода внутри бокса изолирована от перемешивания с окружающей средой стенками бокса. Обменные потоки вещества через донную поверхность влияют на изменение концентрации химических элементов, растворенных в объеме воды внутри камеры. В ходе постановки донной станции, продолжительностью до 3 суток, из массы придонной воды внутри камеры автоматически через заданные промежутки времени отбираются пробы воды, которые после подъема на поверхность «Лендера» анализируются в лаборатории. Кроме того в автоматическом режиме внутри и снаружи камеры измеряются такие параметры среды, как электропроводность, плотность, температура, содержание кислорода и метана. Скорость и направление течения измеряются в месте постановки лендера ADCP, размещенного на борту станции. Полученные данные оцифровываются и записываются в твердотельную память, из которой они после подъема станции перезаписываются в компьютер. Лендер устанавливается на дно с борта судна или подводного аппарата-носителя.
Рассчитанные на длительную постановку и оснащенные гидроакустической аппаратурой для двусторонней связи и дистанционного считывания данных, эти станции позволяют существенно сократить эксплуатационные расходы и повысить эффективность проведения всесторонних океанологических исследований.
На фотографии (рис. 1) изображен ГОА «Мир-2» на палубе судна перед спуском в воду. В манипуляторах ГОА донная станция «Лендер ИО РАН» массой более 30 кг. С помощью ГОА «Мир» были выполнены погружения «Лендера» на рекордную глубину 1400 м на озере Байкал по программе исследования газогидратных залежей в 2008–2010 гг.

Рис. 1. ГОА «Мир» на палубе судна перед спуском под воду. Манипуляторы ГОА удерживают «Лендер ИО РАН» (обведен белым контуром) перед постановкой на дно озера Байкал
Еще один прибор созданный в ИО РАН в середине двухтысячных годов и постоянно используемый в натурных экспериментах по исследованию состояния окружающей среды акваторий, – это профилограф (зонд), делающий вертикальный разрез (измерение параметров воды в зависимости от глубины). Он устанавливается на заякоренную станцию [3]. Вначале прибор «Аквалог» создавался для мониторинга гидрофизической структуры вод в океане и предупреждения потенциально опасных изменений.
Профилограф «Аквалог» проводит исследования биологических и гидрофизических параметров морской воды в промежутках от нескольких часов до месяцев. Важной функцией «Аквалога» является регистрация климатических процессов, влияющих на изменение многолетних серий океанографических данных, получаемых в фиксированных точках на морских акваториях и крупных озерах. Для этой цели необходимо проводить непрерывные измерения параметров воды.
«Аквалог» (рис. 2) – это устройство, которое вертикально перемещается по направляющему тросу, натянутому между якорем на дне и блоком плавучести на поверхности акватории. При перемещении в толще воды «Аквалог» проводит измерения и передает полученную информацию по радиоканалу на береговой блок управления. Трансляция данных выполняется следующим образом: индуктивный модем SBE – несущий трос – притопленная плавучесть – кабель-трос – поверхностный буй – радиомодем DataRadio – блок управления. Кроме того, вся собранная информация сохраняется во флеш-памяти устройства. Система позволяет получать серии океанографических данных, используя стандартные океанографические датчики, установленные на «Аквалоге». Вертикальное перемещение устройства по направляющему тросу реализовано с помощью движителя на базе электродвигателя постоянного тока, оснащенного магнитной муфтой. Движитель управляется микроконтроллером, оснащенным датчиком GE Druck. Последняя модель «Аквалога» несет CTD зонд FSI Excell 2’’ и доплеровский измеритель скорости и направления течений Nortek Doppler 3D. Как опция на «Аквалоге» могут быть установлены дополнительно еще 4 датчика, например флюориметр и прозрачномер.
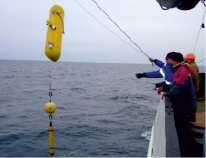
Рис.2. Испытания «Аквалога» на Черном море осенью 2008 года в районе г. Геленджик
Аквалог может быть использован:
а) в оперативной океанографии,
б) для изучения глобальных природных изменений,
в) для мониторинга состояния окружающей среды,
г) для измерений под сезонным ледовым покровом. «Аквалог» отрабатывался и испытывался в процессе полевых исследований в Черном и Каспийском морях в 2006–2008 годах.
Еще одна инновационная разработка, которая на протяжении многих лет успешно развивается в ИО РАН – это океанологические и экологические исследования и наблюдения с помощью необитаемых подводных телеуправляемых аппаратов-роботов (ТНПА или ROV-remotely operated vehicle). В настоящее время это направление представлено семейством ТНПА ГНОМ класса «мини» и «микро», которые используются при проведении широкого спектра подводных работ и исследований. Серия аппаратов включает ТНПА ГНОМ-Микро, ГНОМ-Стандарт, ГНОМ-Супер и ГНОМ-СуперПро. Рабочие глубины аппаратов соответственно располагаются в диапазоне от 50 до 500 м, а масса аппаратов изменяется в диапазоне от 2 до 30 кг.
ТНПА ГНОМ класса «мини» [4] являются основным рабочим инструментом плановых наблюдений и контроля состояния подводных объектов в экспедиционных работах ИО РАН на Черном, Балтийском и Карском морях. В составе ГНОМа имеется 3–6 винтомоторных агрегатов (в них использована магнитная муфта для передачи вращения с вала мотора на вал гребного винта) для обеспечения движения по вертикали и горизонтали, на аппарате установлены одна или две цветные видеокамеры с четырьмя источниками заливающего света на базе светодиодных матриц. В составе базового аппаратурного комплекса имеется датчик глубины и курсоуказатель (компас), которые обеспечивают режимы удержания аппарата на заданном горизонте и стабилизацию движения по курсу (автоглубина и автопилот). Длина стандартного кабеля-связки, упрочненного кевларовыми нитями, составляет 150 м. Дополнительно ТНПА может быть оборудован схватом-манипулятором, гидролокатором кругового обзора типа Micron, гидроакустической системой позиционирования с ультракороткой базой (USBL Tritech) и кабелем длиной до 500 м. Аппаратурный комплекс ГНОМ включает сам подводный аппарат-робот, лебедку с кабелем и токосъемником, блок управления с аккумулятором, видеомонитор и записывающее устройство. Все элементы размещаются в двух водонепроницаемых чемоданах-контейнерах общим весом до 30 кг. На рис. 3 представлена базовая модель подводного телеуправляемого аппарата «Гном-Супер».

Рис. 3. Базовая модель подводного телеуправляемого аппарата «Гном-Супер»
ТНПА ГНОМ интенсивно использовались и используются для поиска и обследования затонувших судов в российской части Черного моря в интересах МЧС России на предмет экологической безопасности, наличия захороненных нефтепродуктов и химических загрязнителей.
На протяжении уже почти 40 лет в Институте океанологии развивается такая отрасль морского приборостроения, как разработка и построение гидролокационных средств исследования морского дна и подводных объектов [5]. За это время была создана полная технология проектирования и изготовления глубоководных буксируемых гидролокационных средств исследования морфологии рельефа дна, поиска и исследования подводных объектов, а также акустического зондирования донных отложений с целью изучения их стратификации и идентификации объектов, погребенных в толще осадков. Созданная технология включает, во-первых, гидроакустические антенны с рабочими частотами от 5 до 70–450 кГц для гидролокаторов бокового обзора (ГБО) и – 4–15 кГц для акустических профилографов, во-вторых, глубоководные (до 6000 м), шельфовые (до 300 м) и мелководные носители гидроакустических антенн и подводной приемно-усилительной аппаратуры, в-третьих, средства и методы передачи гидроакустической информации по длинным линиям, представляющим собой коаксиальные и оптико-волоконные проводники в составе грузонесущих кабель-тросов длиной до 10000 м, в-четвертых, средства и методы передачи энергии и электропитания подводной электронной аппаратуры в составе глубоководных буксируемых носителей, в-пятых, программно-аппаратные комплексы для сбора, отображения и архивирования информации, получаемой с помощью глубоководной гидролокационной аппаратуры. Программы реального времени, управляющие работой всего комплекса с помощью ПЭВМ, осуществляют в реальном времени отображение или представление текущей гидролокационной информации (изображений дна) в виде движущегося окна, а также изображений разрезов осадочной толщи, получаемых с помощью акустического профилографа. Программная технология постобработки позволяет привязать каждую точку гидролокационного изображения через единое время к географическим координатам, информация о которых содержится в специальных файлах, также синхронизированных с единым временем. Специальные опции программного обеспечения постобработки позволяют измерять по гидролокационному изображению высоту и линейные размеры зарегистрированных объектов, масштабировать изображения и разрезы и наносить на них сетки графления, а также получать отпечатки участков изображений дна в формате *.bmp. Надо отметить, что рассмотренная сквозная технология построения гидролокационной аппаратуры разработана в Институте океанологии и использует исключительно отечественные комплектующие для изготовления ключевых элементов, таких как, например, гидроакустические антенны. С использованием гидролокаторов и акустических профилографов собственной конструкции Институт океанологии осуществил множество подводных операций, в том около двух десятков экспедиций по уточнению мест захоронений подводных потенциально опасных объектов (ППОО) в Черном, Балтийском и Карском морях в интересах МЧС России, ведущего реестр ППОО. На рис. 4 приведено изображение ППОО – судна Сакко и Ванцетти, затонувшего в Геленджикской бухте в результате налета фашистской авиации. Судно причислено к ППОО, так как содержит боеприпасы времен Великой Отечественной войны [6].
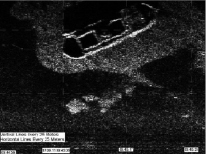
Рис. 4. Полутоновое изображение парохода Сакко и Ванцетти, уничтоженного фашистской авиацией в Великую Отечественную воину на входе в Геленджикскую бухту, полученное с помощью гидролокатора бокового обзора (ГБО «СФ-ТМ» с рабочей частотой 240 кГц). Сетка графления – 25х25 м
Важным аспектом деятельности направления по морской технике ИО РАН является испытание образцов новой техники подводных исследований. В Южном отделении Института океанологии (ЮО ИО РАН) в г. Геленджике запущена в эксплуатацию барокамера для испытаний глубоководной техники. Эта камера была изготовлена в 70-х годах прошлого столетия на Уральском заводе химического машиностроения. В 80-х годах камера была установлена в бетонный колодец рядом с Гипербарическим комплексом ЮО ИО РАН в г. Геленджике. Основными работами, выполненными с использованием этой тест-камеры, были испытания узлов и систем строившегося в то время в ИО РАН обитаемого аппарата «Рифт» с рабочей глубиной 4000 м. В 1990 г. тест-камера была законсервирована, а в середине 2000-х было предпринято ее восстановление. В 2008 году (рис. 5) было проведено техническое освидетельствование, диагностика и получено разрешение на эксплуатацию. Основные технические характеристики камеры:
а) рабочее давление – 900 кгс/см2;
б) внутренний диаметр – 800 мм;
в) длина внутренней рабочей части – 5000 мм;
г) рабочая среда – вода;
д) источник давления – насос НП-800;
е) вес тест-камеры – 45 тс;
ж) вес крышки – 5 тс;
з) ориентация в пространстве – вертикальное.
В верхней части камеры расположены четыре отверстия диаметром 150 мм, каждое из которых предназначено для монтажа в них электрических вводов, гидро- и пневмовводов, иллюминаторов и т.д. В 2011 году в камере были проведены первые крупные испытания: испытания движительного комплекса подводного спасательного аппарата «Бестер».

Рис. 5. Фланец тест-камеры со шпильками и крышка перед закрытием
Выводы
Рассмотренные выше технологии и аппаратура разработаны в ИО РАН и находятся на мировом уровне, а в ряде случаев превосходят его. Они эффективно используются ИО РАН при проведении плановых экспедиционных исследований Института, а также и других институтов Российской академии наук в интересах как фундаментальных так и прикладных наук, а также при выполнении хоздоговорных контрактов с такими ведомствами, как МЧС РФ, МО РФ, Минприроды РФ и с ведущими компаниями нефтегазового комплекса (Роснефть, Лукойл, Газпром и др.) при обследовании и регулярном мониторинге подводных объектов естественного и искусственного происхождения и контроле состояния подводных продуктопроводов, кабельных коммуникаций и подводных потенциально опасных объектов.
Необходимо развивать уникальные инновационные технологии и аппаратуру, разработанную и внедренную в практику морских работ учеными и инженерами ИО РАН.
Библиографическая ссылка
Розман Б.Я., Римский-Корсаков Н.А. АППАРАТУРНЫЕ КОМПЛЕКСЫ ДЛЯ ДИСТАНЦИОННЫХ НАБЛЮДЕНИЙ В ГИДРОСФЕРЕ // Международный журнал прикладных и фундаментальных исследований. 2017. № 11-2. С. 276-280;URL: https://applied-research.ru/ru/article/view?id=12013 (дата обращения: 30.06.2026).
DOI: https://doi.org/10.17513/mjpfi.12013