

Целью исследования, представленного в настоящей работе, является анализ опыта разработок Институтом океанологии (ИО РАН) глубоководных гидролокаторов бокового обзора для океанологических исследований и прикладных работ и синтез на его основе новейших образцов глубоководных систем, использующих современные технические решения, материалы, электронные и механические устройства.
Материалом для анализа существующих технических решений при создании рассматриваемой глубоководной техники являются глубоководные ГБО в составе буксируемых необитаемых подводных аппаратов (БНПА) типа «Мезоскан» и «Звук», которые создавались в 1980-х гг. для исследования морфологии мезомасштабных форм рельефа дна океана, а также поиска подводных объектов на глубинах до 6 км. Структура этих аппаратурных комплексов определялась условиями работ в океане с борта научно-исследовательских судов водоизмещением более 1,5 тыс. т, имеющих лабораторные помещения, электросеть 220В 50Гц, мощные лебедки и спускоподъемные устройства. Основными элементами таких комплексов являлись: собственно БНПА, буксирный грузонесущий кабель-трос с электропроводящей коаксиальной парой, буксировочное устройство (в простейшем случае канифас-блок), входящее в состав спуско-подъемного устройства, кабельная лебедка с вращающимся токосъемным переходом, судовой управляющий комплекс электронных устройств, а также аппаратура отображения и сбора получаемой информации. Впоследствии в состав последней стали включать управляющие ЭВМ. Описание БНПА типа «Звук» и «Мезоскан» можно найти в работе [1].
Наиболее технически совершенным из комплексов БНПА типа «Звук» является БНПА «Звук-МАФТ», созданный в 1980-х гг. в интересах Гидрографической службы (ГС) для исследований поверхности дна и подводных объектов. БНПА входил в состав аппаратурного комплекса, который помимо ГБО был оборудован системой подводной навигации, глубомером, альтиметром, фото-стереосистемой, сверхчувствительной видеокамерой, импульсными светильниками и осветителями заливающего света, магнитометром, пилотажными датчиками, а также системой сбора информации на базе ЭВМ СМ1420. На рис. 1 представлена фотография подводного аппарата «Звук-МАФТ». Комплекс эксплуатировался до 1992 г. в Атлантическом океане, Черном, Средиземном и Балтийском морях [1, 2], а в начале 1990-х гг. был выведен из эксплуатации. Вследствие прекращения Россией интенсивных исследований в Мировом океане все глубоководные океанологические аппараты и комплексы ИО РАН к концу 1990-х гг. были утрачены.

Рис. 1. Глубоководный буксируемый аппарат «Звук-МАФТ» (1991 г.).
Анализ результатов, полученных в процессе создания и эксплуатации БНПА «Звук-МАФТ», позволил в 1998 г. в ИО РАН снова создать глубоководный гидролокатор бокового обзора «Мезоскан». При этом была достигнута минимизация весогабаритных характеристик, что позволило доставлять прибор к месту работ (дельта Волги, оз. Байкал, оз. Телецкое и др.) пассажирским транспортом. Усовершенствованная система передачи данных на базе электромеханических узкополосных фильтров позволила, с одной стороны, использовать одножильный геофизический грузонесущий кабель вместо дефицитного коаксиального, а с другой стороны – увеличить число гидролокационных каналов. Была разработана новая система регистрации гидролокационных данных (аппаратно-программный комплекс РАСТР), которые представлялись на мониторе ПЭВМ в виде движущегося окна и сохранялись в цифровом виде на жестком диске ПЭВМ. Комплект гидролокатора включал подводный носитель (ПН) с гидроакустическими антеннами (ГА) двух частот и бортовым электронным блоком (БЭБ), а также судовую аппаратуру в составе судового аналогового электронного блока (СЭБ), программируемого усилителя с АЦП и ПЭВМ. Электрически и механически обе части соединялись одножильным кабель-тросом длиной до 3 км, на котором буксировался ПН. Был реализован следующий алгоритм функционирования устройства. Работой СЭБ управляет ПЭВМ с помощью программируемого усилителя (ПРУ) и соответствующей программы реального времени. Синхроимпульсы (СИ), сформированные в СЭБ, через фильтры присоединения по одножильному или коаксиальному кабель-тросу поступают в БЭБ ПН, где инициируют излучение гидролокационной аппаратурой и ГА зондирующих импульсов. Принятые ГА эхо-сигналы усиливаются в БЭБ и через фильтры присоединения и кабель-трос поступают в СЭБ. В СЭБ эхо-сигналы вновь усиливаются, преобразовываются схемами ВАРУ и поступают в ПРУ. В ПРУ сигналы оцифровываются и вводятся в ПЭВМ, где осуществляется их отображение на экране монитора. Головной (макетный образец) гидролокационного комплекса «Мезоскан» с глубиной погружения до 2000 м, оборудован двумя ГБО с рабочими частотами 70 кГц и 240 кГц, акустическим профилографом с рабочей частотой 5 кГц и маяком-ретранслятором подводной системы навигации [3]. Характеристики гидролокатора приведены в таблице.
Технические характеристики гидролокатора бокового обзора «Мезоскан-М»
|
№ п/п |
Характеристика |
Значение |
|
1 |
Рабочая частота, кГц |
70/240 |
|
2 |
Раскрыв главного лепестка характеристики направленности на уровне половинной мощности, град |
0,75 °x60 °/1 °x60 ° |
|
3 |
Длительность зондирующего сигнала, мс |
0,05/0,2/1,0 |
|
4 |
Тип зондирующего сигнала |
тональная посылка |
|
5 |
Тип подводного носителя |
буксируемый |
|
6 |
Максимальная рабочая дальность, м |
750 |
|
7 |
Максимальная глубина обследуемого водоема, м |
2000 |
|
8 |
Максимальная частота следования зондирующих импульсов, Гц |
5/10 |
|
9 |
Максимальная электрическая мощность в импульсе, Вт |
300 |
|
10 |
Максимальная скорость движения, узлы |
6 |
|
11 |
Частота аналогово-цифрового преобразования, кГц |
100 |
|
12 |
Разрядность аналогово-цифрового преобразования |
8 |
|
13 |
Тип системы сбора и отображения информации |
ПЭВМ |
|
14 |
Масса подводного носителя,кг |
60 |
|
15 |
Габариты подводного носителя, м |
1,9х0,3х0,3 |
|
16 |
Масса судового блока, кг |
2,5 |
|
17 |
Габарты судового блока, мм |
250х150х300 |
|
18 |
Электропитание |
220В |
Впоследствии на производственной базе ОКБ Океанологической техники РАН с участием ИО РАН по программе «Модернизация материально-технической базы РАН» были построены еще три образца ГБО «Мезоскан-М» упрощенной конструкции, представляющие собой одночастотный ГБО с рабочей частотой 80 кГц и глубиной погружения 2000 м. Один аппарат был передан в Южное, другой в Атлантическое отделения ИО РАН, а третий остался в распоряжении Лаборатории гидролокации дна и с 2002 г. постоянно использовался для исследования морфологии рельефа дна и подводных объектов, в том числе потенциально опасных – на Балтике, в Черном и Карском морях. На рис. 2 приведена фотография подводного носителя «Мезоскан-М». Принципиально функциональные схемы и конструкция судовой части гидролокаторов «Мезоскан-М» и «Мезоскан» не отличаются.

Рис. 2. Буксируемый глубоководный носитель ГБО «Мезоскан-М»/«Мезоскан-Т»: 1 – прочный корпус (труба) бортового электронного блока; 2 – антенна ГБО; 3 – груз-утяжелитель; 4 – узел подвески; 5 – стабилизатор; 6 – кабель-трос; 7 – герметичный ввод
Анализ результатов эксплуатации ГБО «Мезоскан» и «Мезоскан-М» позволил сформулировать требования к разработке новых инновационных глубоководных гидролокационных систем. Основные требования состояли в повышении помехозащищенности каналов в линии связи и увеличении ее возможной длины до 10 км, а также в повышении энергетического потенциала гидролокаторов при неизменной или более высокой разрешающей способности [4]. Исходя из этих положений в 2018/19 году была проведена кардинальная модернизация гидролокатора «Мезоскан-М», дополнительный толчок которой дал переход в ИО РАН на кабель-тросы с оптико-волоконными жилами для глубоководных БНПА, несущих видеосистемы наблюдения за донными организмами и микрорельефом [5].
С учетом упомянутых выше требований модернизация гидролокатора включала следующие основные аспекты:
– переход на систему передачи информации от аппарата в судовую часть комплекса по оптико-волоконному кабелю;
– как следствие первого, переход на автономную систему энергопитания;
– переход от аналоговой обработки сигнала в ПН к цифровой;
– формирование сложных зондирующих посылок и согласованная фильтрация эхо-сигналов методом корреляционной обработки;
– размещение всех аппаратных средств гидролокатора в подводном носителе в виде бортового электронного блока.
На рис. 3 представлен бортовой электронный блок (БЭБ) ГБО «Мезоскан-Т». БЭБ размещается в цилиндрическом корпусе из нержавеющей стали (рис. 2, поз. 1), рассчитанном на действие внешнего гидростатического давления 250 атм. Корпус имеет две крышки, снабженные парными герметичными радиальными уплотнениями. Носовая крышка глухая. Кормовая крышка снабжена, во-первых, герметичными электроразьемами для подключения гидроакустических антенн левого и правого борта, а во-вторых, вводом для подключения оптического волокна. Кроме того, крышка является консолью, к которой крепится БЭБ (рис. 3).

Рис. 3. Подводный электронный блок ГБО «Мезоскан-Т»: 1 – крышка прочного корпуса (консоль БЭБ) с герметичными разъемами антенн и вводом оптоволокна; 2 – усилители мощности левого и правого каналов ГБО; 3 – вывод оптической жилы; 4 и 5 – вторичные источники питания; 6 – оптоволоконный модем; 7 – литий-ионная батарея емкостью 60 Ач напряжением 12В
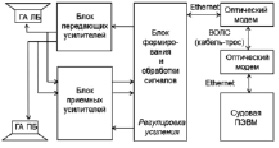
Рис. 4. Структурная схема гидролокатора «Мезоскан-Т»: ГА – гидроакустическая антенна; ЛБ – левый борт, ПБ – правый борт; ВОЛС – волоконно-оптическая линия связи
Для механической (буксировка) и электрической (передача информации и команд управления) связи подводной и судовой частей аппаратурного комплекса ГБО использован оптоволоконный грузонесущий кабель КГ1х3Е-70-60-3 ООО «Псковгеокабель». Функциональная схема гидролокатора приведена на рис. 4.
Основной частью ГБО «Мезоскан-Т» является блок генерации и обработки сигналов, который установлен в цилиндрическом прочном корпусе подводного носителя гидролокатора и выполнен в виде печатной платы с двусторонним монтажем радиоэлементов. Блок обеспечивает, во-первых, синхронную работу подводной части гидролокатора и программного обеспечения отображения и сбора информации, установленного на судовой ПЭВМ, через оптико-волоконный канал связи буксирного кабель-троса посредством оптических модемов и интерфейса Ethernet. Во-вторых, блок генерирует линейно-частотно-модулированные (ЛЧМ) сигналы, которые используются для формирования зондирующих акустических импульсов. В-третьих, здесь осуществляется согласованная фильтрация принятых сигналов, которая заключается в их оцифровке и корреляционном анализе с последующим детектированием. В заключение в блоке детектированный сигнал обрабатывается для передачи в ПЭВМ через интерфейс Ethernet по оптической системе связи.
Основу блока генерации и обработки сигнала составляет микроконтроллер STM32F407 с 32-битным ядром ARM Cortex-M4. Как видно, на этом микроконтроллере реализована наибольшая часть функциональности гидролокатора, а остальные элементы гидролокатора (отображение данных и их регистрация) реализованы в виде программы, установленной на судовой ПЭВМ.
Для обеспечения синхронизации работы и информационной связи судовой и подводной частей выбран интерфейс Ethernet. Этот выбор сделан не случайно. Интерфейс Ethernet широко применяется в компьютерных сетях и в различном цифровом оборудовании. Использование этого интерфейса в качестве основного позволяет встроить блок (плату) генерации и обработки сигнала практически в любой комплекс, где предполагается сбор данных с помощью персонального компьютера.
Блок генерации и обработки сигналов способен генерировать и обрабатывать ЛЧМ сигналы с различной несущей частотой, девиацией частоты и длительностью и фактически является универсальным элементом, который можно применять в различных гидролокационных приборах без изменений.
Согласованная фильтрация сигнала в блоке генерации и обработки осуществляется преимущественно в цифровом виде. Принятый сигнал, поступающий с гидроакустической антенны ГБО, усиливается приемным усилителем со встроенным полосовым фильтром, настроенным на несущую центральную частоту сигнала. Далее происходит оцифровка сигнала с помощью внешних АЦП с разрядностью 16 бит. Затем с помощью алгоритмов в микроконтроллере осуществляется корреляционный анализ сигнала и его последующее амплитудное детектирование.
Приемные усилители осуществляют усиление и предварительную полосовую фильтрацию принятого сигнала. Они построены на основе малошумящих операционных усилителей и активных фильтров. Важной особенностью приемных усилителей является то, что они обладают программируемым коэффициентом усиления, изменение которого управляется командами, поступающими от платы генерации и обработки сигнала. Коэффициент усиления может регулироваться в диапазоне от 40 до 80 дБ в процессе функционирования гидролокатора. Регулировка коэффициента осуществляется из рабочего окна гидролокационной программы реального времени судовой ПЭВМ через ВОЛС.
Бортовой оптический модем преобразует информационные сигналы, поступающие на его вход через интерфейс Ethernet в сигналы оптической линии, а судовой оптический модем на другом конце линии преобразует эти сигналы в электрические, которые через выходной интерфейс Ethernet модема поступают в ПЭВМ. В ГБО «Мезоскан-Т» был использован преобразователь модели Planet FST-806B20. При необходимости (линия связи иного типа) может быть использован преобразователь Ethernet-коаксиальная пара или иной. Также преобразователи могут вообще не использоваться в случае монтажа ГА непосредственно на судне, когда подводный носитель ГБО не требуется.
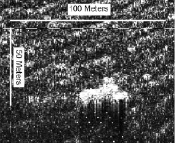
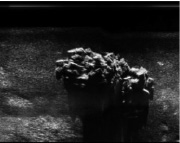
Буксируемый глубоководный ГБО «Мезоскан-М» начиная с 2007 г. постоянно использовался для исследования и уточнения местоположения подводных объектов, в том числе потенциально опасных на Балтике, в Черном и Карском морях [6, 7]. Эксплуатация ГБО «Мезоскан-Т» началась с 2019 г. Гидролокатор был использован при обследовании одного из малоизвестных объектов, упомянутых в «Белой Книге – 2000». Объект расположен в «устьевой» части залива Абросимова восточного побережья Новой Земли в Карском море. Объект фиксировался в том числе в процессе гидролокационной съемки 2013 г. с использованием гидролокатора «Мезоскан-М». Полученное тогда изображение представлено на рис. 5, а. Природу объекта по полученному в 2016 г. изображению определить не удалось. Под сомнением было также его техногенное происхождение. В 2019 г. было предпринято обследование объекта с использованием модернизированного ГБО «Мезоскан-Т». Первый же проход с модернизированным гидролокатором позволил не только определить структуру и природу объекта, но и «рассмотреть» отдельные составляющие, такие как бочки, контейнеры и агрегаты системы вентиляции. Последующий видеоосмотр объекта с помощью телеуправляемого необитаемого аппарата (ТНПА) полностью подтвердил гидролокационную информацию. На рис. 5 приведены гидролокационные изображения исследованного объекта, полученные в 2013 г. и в 2019 г. с использованием соответственно ГБО «Мезоскан-М» и «Мезоскан-Т».
а) б)
Рис. 5. Гидролокационное изображение подводного объекта (группа контейнеров с отходами размером 1х1х1,5 м): а) полученное с помощью гидролокатора бокового обзора «Мезоскан-М» в 2013 г.; б) полученное с помощью модифицированного гидролокатора бокового обзора «Мезоскан-Т», в 2019 г. – размер кадра 70х50 м
Представленные результаты экспериментальных исследований подтверждают правильность выбранных направлений развития глубоководных гидролокационных технологий на основе анализа разработок Института океанологии прошлых лет. Можно утверждать, что прогресс в разработке глубоководных буксируемых, в том числе гидролокационных, систем связан с оптоволоконными линиями и цифровыми каналами связи, исключением системы передачи энергии по кабелю, автономными литий-ионными источниками питания, а также технологиями согласованной фильтрации на основе корреляционного анализа.
Работа выполнена в рамках государственного задания ФАНО России (тема № 0149-2018-0011) при частичной поддержке РФФИ (проект «Арктика» № 18-05-60070 и Рго_а №17-05-41041).
Авторы выражают признательность Я.И. Белевитневу, С.В. Жаворонкову и А.А. Пронину за помощь в подготовке экспериментальных исследований.
Библиографическая ссылка
Римский-Корсаков Н.А., Тронза С.Н., Анисимов И.М. РАЗВИТИЕ ГИДРОЛОКАЦИОННЫХ ТЕХНОЛОГИЙ ГЛУБОКОВОДНЫХ ИССЛЕДОВАНИЙ РЕЛЬЕФА ДНА И ПОДВОДНЫХ ОБЪЕКТОВ // Международный журнал прикладных и фундаментальных исследований. 2019. № 9. С. 85-90;URL: https://applied-research.ru/ru/article/view?id=12856 (дата обращения: 12.07.2026).
DOI: https://doi.org/10.17513/mjpfi.12856