

Последствия научно-технического прогресса, возрастающая численность населения, а также нерациональное использование природных ресурсов привели к целому ряду экологических проблем. Одна из них – пугающее своими масштабами образование отходов. На современном этапе развития общества, характеризующемся переселением людей в крупные города и появлением многомиллионных мегаполисов, проблема обращения с отходами усугубилась многократно [1, 2].
Актуальность темы исследования обусловлена целым комплексом причин, прямо или косвенно связанных с транспортировкой ТКО. Существующие системы сбора отходов работают нерационально, так как в рейс выходит большое количество мусоровозных машин, которые дублируют часть маршрутов друг друга и совершают заезды в дворовые территории, опорожнение контейнеров в которых не требуется. В связи с этим проблемы, касающиеся разработки автоматизированного составления маршрутов для мусоровозных машин, характеризуются особой остротой и требуют изучения.
Степень изученности проблемы автоматизированной системы составления маршрутов для мусоровозных машин и её значения в решении экологических и экономических задач в России остается весьма низкой. Тогда как в США и Европе этим вопросом занялись серьёзно. Существенный вклад в изучение проблемы мониторинга контейнерных баков внесли фирмы Enevo One и Ecube Labs. Данные системы положительно зарекомендовали себя в странах с умеренным климатом [2].
Цель исследования – оптимизация автоматизированной системы составления маршрутов для мусоровозных машин.
Поставленная в работе цель обусловлена необходимостью решения следующих задач:
- изучить научную литературу, касающуюся темы исследования;
- рассмотреть современные системы сбора отходов с территории и выделить из них самые рациональные;
- провести анализ идеальной системы переработки мусора;
- описать разработку автоматизированной системы составления маршрутов;
- предложить способ по улучшению работы системы мусоротранспортировки.
Научная новизна исследования состоит в том, что многие сложные вопросы, с которыми сталкиваются перевозчики, могут быть решены, если применить датчики, которые информируют о загруженности мусорных контейнеров в режиме реального времени. Проведенный анализ позволит разработать модель автоматизированной системы составления маршрутов и полностью исключит «пустые» маршруты.
Практическая значимость исследования заключается в возможности использования разработанной методики для решения текущих задач в сфере логистической системы сбора мусора с придомовых территорий. Выводы и предложения работы могут быть реализованы в практической деятельности мусороперевозчиков. Полученные научные результаты также могут быть использованы государственными органами при разработке программ совершенствования городского пространства.
Материалы и методы исследования
В соответствии с намеченной целью и задачами исследования авторами были определены следующие методы:
- теоретический анализ научной и практической литературы по теме исследования;
- синтез, характеристика объекта через описание связей и зависимостей его частей;
- дедукция, логическое выведение частных положений из общей мысли;
- наблюдение или конкретизация – рассмотрение объекта в реальных условиях существования;
- экспериментальный метод, включающий проведение констатирующего эксперимента, анализ и обобщение полученных данных.
Степень достоверности исследования обеспечивается за счет обращения к широкому кругу официальных источников, содержащих значительный объем фактологического материала, а также многочисленным экспериментальным наблюдениям.
Результаты исследования и их обсуждение
На основе рассмотренного теоретического материала по описанию системы организации управления уборкой мусора в России и других странах было установлено следующее.
Несменяемая система мусоросборников является наиболее производительной, применяется в качестве основной и позволяет наиболее полно использовать мусоровозы и достигнуть высокой производительности труда [1]. Маршрут сбора отходов должен быть непрерывным, повторные пробеги мусоровозов по одним и тем же улицам должны сводиться к минимуму. К сожалению, как уже было указано, уровень переработки ТКО (твердые коммунальные отходы) в России продолжает оставаться недостаточным по сравнению с количеством мусора различного происхождения, и количество регулярно образующихся отходов с каждым годом только увеличивается [3, 4].
В настоящее время процесс сбора отходов опирается на использование статистических маршрутов и графиков. Контейнеры вывозятся ежедневно, независимо от уровня их заполнения. Привязанность к расписанию приводит к тому, что одни баки переполняются, а другие не успевают заполниться. Это становится причиной ненужных расходов, неэффективного использования парка автомобилей (рис. 1). Если установить систему мониторинга заполняемости контейнеров, то маршруты будут строиться рационально (рис. 2).
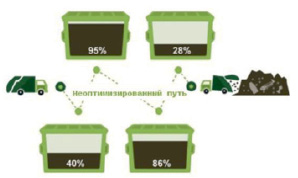
Рис. 1. Нерациональный маршрут мусоровозов

Рис. 2. Рациональный маршрут мусоровозов
Проанализировав организацию управления уборкой мусора, можно утверждать, что в большинстве городов Российской Федерации применяется система несменяемых мусоросборников и ежедневный вывоз ТКО. Отходы собирают по заранее определенному маршруту с фиксированной периодичностью.
Для определения фактической наполняемости контейнеров в квадрате улиц Минская – Жигулевская – Мельникайте – Харьковская в г. Тюмени был проведен эксперимент по определению оптимальности мусоровозных маршрутов. Сбор ТКО в данном районе осуществляется ежедневно в период с 07:30 до 10:00 часов мусоровозами с задней загрузкой. В исследуемом квадрате сборниками отходов являются металлические евроконтейнеры на четырех колесах.
В ходе наблюдения было установлено, что заполняемость контейнеров в зависимости от дней недели различная. В понедельник отходов накапливается больше, чем во все остальные дни, а в пятницу и субботу показатели значительно меньше. Также результаты эксперимента показывают, что на заполняемость мусорных баков влияет и класс жилья: например, в домах стандартного и комфорткласса больше образуется отходов из пластика, упаковочных материалов, по сравнению с домами экономкласса. Ещё одним показателем наполняемости является сезонность: зимой количество выбрасываемых отходов увеличивается, летом их в разы меньше.
Для исследования было выбрано семь мусоросборочных площадок, на каждой из которых по три контейнера для отходов. Наблюдения велись ежедневно в течение двух недель в 07:00 и 20:00 часов. Результаты эксперимента представлены на диаграмме (рис. 3).
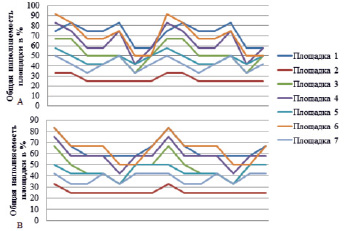
Рис. 3. Диаграмма заполняемости мусорных баков исследуемого участка: А – в 07.00 (утро), В – в 20.00 (вечер)
Проанализировав графики, можно сделать вывод о том, что ежедневный вывоз отходов требуется не со всех площадок. ТКО целесообразно вывозить ежедневно с площадок номер один, три, четыре и шесть. На площадках два, пять и семь баки не успевают заполняться, поэтому ежедневный вывоз мусора не требуется.
Таким образом, эксперимент показывает, что сложившаяся система очистки города является неэффективной, так как из-за неравномерной наполняемости баков осуществляются лишние рейсы мусоровозов, что является экономически невыгодным (рис. 1, 2).
Рассмотрев все этапы «жизни» ТКО с точки зрения автоматизации, было решено оптимизировать систему логистики посредством применения «умных» систем.
Для решения данной проблемы мы предлагаем использовать датчики заполняемости мусорных баков. Благодаря им можно:
- оптимизировать маршруты и расписание сбора отходов в режиме реального времени;
- снизить эксплуатационные и временные затраты;
- повысить уровень чистоты в зоне расположения мусорных баков и снизить уровень выброса парниковых газов, шума и износа дорожного покрытия.
Предлагаемая система использует «умный» беспроводной многофункциональный датчик для сбора данных об уровне заполнения мусорных контейнеров, а также систему обнаружения угарного газа. Данные в режиме реального времени отправляются в диспетчерский пункт. Все данные с датчиков поступают на сервер, где вся информация сохраняется и затем анализируется. Это позволяет получать историю за любой период. Программа рассчитывает точные прогнозы для идеальных графиков вывоза баков и наиболее удобные маршруты сбора ТКО. Данная система поможет сократить затраты, выбросы в атмосферу, износ дорожного покрытия и транспортных средств, шумовое загрязнение и уменьшает часы работы мусоровозных компаний [5].
Используемые для решения поставленных задач датчики должны обладать следующими основными свойствами:
- однозначная зависимость выходной величины от входной;
- стабильность характеристик во времени;
- высокая чувствительность;
- малые размеры и масса;
- отсутствие обратного воздействия на контролируемый процесс и на контролируемый параметр;
- работа при различных условиях эксплуатации;
- различные варианты монтажа.
Датчик состоит из двух частей: корпуса, содержащего всю управляющую электронику и батарейный блок, и основания, служащего для крепления всего датчика к баку. Размер корпуса зависит от размера внутренних компонентов – габаритные платы с управляющей электроникой и высотой антенны связи. Корпус датчика не должен иметь выступающих частей и углов, чтобы избежать засорения и увеличить устойчивость к периодическим нагрузкам, вызываемым оборотом отходов в баке. Датчик не должен быть поврежден и не должен препятствовать движению мусора при заполнении/опорожнении бака. Конструкцию датчика нужно предусмотреть такой, чтобы после его закрепления доступным оставался только батарейный блок для осуществления его легкой замены.
Мусор является субстанцией непредсказуемой, его плотность и вес неизвестны. Он может оказаться рыхлым, прозрачным, агрессивным, поэтому применение чувствительных оптических датчиков нецелесообразно. Из всего многообразия решений было принято решение остановиться на следующих комплектующих, входящих в состав датчика:
1. Для отслеживания наполненности мусорного бака предлагается использовать ультразвуковой дальномер HC-SR04. Принцип работы основан на отражении звука от измеряемого объекта.
2. Датчик газа типа MQ2(или4) служит для обнаружения углеродистых газов (пропана, бутана, метана), дыма (взвешенных частиц, являющихся результатом горения) и водорода.
3. Arduino Nano – мозг датчика. Платформа построена на микроконтроллере, имеет небольшие размеры.
4. Для передачи данных служит сеть LoRaWAN. LoRaWAN – это «условно глобальная» сеть, состоящая из конечных устройств (nodes), отправляющих данные на концентраторы (gateway).
В качестве «узла» может использоваться модем RN2483 для передачи данных от датчиков. Он имеет двухстороннюю связь, что позволяет осуществлять удаленное управление устройствами, в том числе автономными. А также изменение конфигурации расписания радиопередачи. Подключение к датчикам осуществляется по двум телеметрическим входам и не требует дополнительных настроек. Каждый концентратор имеет доступ к сети Интернет и отправляет принятые данные на сервер сети Интернета вещей.
Рассмотрим взаимодействие с пользователем системы автоматизированного составления маршрутов для мусоровозных машин. Всех пользователей условно можно разделить на три группы: менеджер, диспетчер и водитель. У каждой группы свой пользовательский интерфейс и определенный набор возможностей. Такое разделение позволит уменьшить сложность пользования предлагаемой системой.
Менеджер будет видеть, насколько эффективно работает его проект, он получает данные об общем состоянии системы в режиме реального времени, а именно: уровень наполненности контейнеров, количество автомобилей на линии, количество убранных опустошенных и заполненных баков и так далее. Также менеджер будет видеть местоположение каждого водителя на карте и может выдавать ему конкретное задание, что обеспечивает гибкость работы системы.
Диспетчер – пользователь, который выдает задачи водителям, без этой единицы в системе можно обойтись, так как система может сама назначать задачи в соответствии с выбранным алгоритмом или правилами и выдавать их водителям. Данная должность не является обязательной.
Водитель – это главный исполнитель задач, он имеет простой и минимально загруженный пользовательский интерфейс. Главными элементами поступающих к нему данных являются: карта с мусорными баками, вычисленный системой оптимальный маршрут, а также список задач для выполнения.
Вся информация будет поступать в сеть Интернета вещей в режиме реального времени. В Тюмени открыта первая региональная открытая сеть Интернета вещей, которая позволит экономить на развертывании инфраструктуры. Так как сеть уже существует, это повысит общую экономическую эффективность предлагаемой системы, а также платформа является открытой и в ней будут разрабатываться модули учета заполнения мусорных баков. Данные, которые мы получаем из этой системы, могут быть использованы для составления маршрутов мусоровозных машин и определения оптимального числа мусоровозов.
Заключение
В исследовании были выявлены основные причины нерационального использования мусоровозного транспорта. Описан способ повышения эффективности системы мусоротранспортировки, которая позволит существенно снизить затраты на транспортировку вывозимого мусора, оптимизировать маршруты и расписание сбора отходов в режиме реального времени.
Описанная система позволяет значительно упростить и оптимизировать организацию сбора и вывоза мусора в крупных городах, снизить эксплуатационные и временные затраты, повысить уровень чистоты в зоне расположения мусорных баков и снизить уровень выброса парниковых газов, шума и износа дорожного покрытия.
Библиографическая ссылка
Николаева Д.Р., Салова В.В., Николенко Т.А. ПРОЕКТИРОВАНИЕ АВТОМАТИЗИРОВАННОЙ СИСТЕМЫ СОСТАВЛЕНИЯ МАРШРУТОВ МУСОРОУБОРОЧНЫХ МАШИН // Международный журнал прикладных и фундаментальных исследований. 2021. № 9. С. 118-122;URL: https://applied-research.ru/ru/article/view?id=13282 (дата обращения: 21.07.2026).