

При проведении морских экспедиционных работ возникают задачи оперативного измерения глубины погружения различной зондирующей аппаратуры с точностью до десятых долей метра. Это могут быть как одиночные погружаемые приборы, так и различные протяженные косы. Рассмотрим разработку и использование системы измерения глубины буксируемой геофизической косы. На основе данной системы также была разработана система измерения глубины зондирующего комплекса регистрации частиц.
Морские геофизические косы могут быть как плавающими, так и погруженными. Готовая коса монтируется на специальной лебедке на палубе в кормовой части судна-носителя. Разворачивание косы на заданном полигоне работы выполняется следующим образом: судно-носитель ведут прямым курсом на малом управляемом ходу. Вытравливают косу в воду с лебедки с кормы судна, начиная с хвостовой части до головной, с последовательной установкой заглубителей и прочих необходимых элементов. Для правильной математической интерпретации результатов измерения погруженными косами желательно обеспечить движение косы на заданном горизонте, для чего головной и хвостовой концы погруженной части косы снабжают заглубителями и гидродинамическими тормозящими устройствами.
Для настройки и контроля горизонтальности погруженной косы в процессе работы необходимо иметь возможность измерять глубину погружения нескольких заранее определенных точек косы, например головной, средней и хвостовой. Решением этой задачи является оснащение косы телеметрической системой измерения глубины в выбранных точках. Целью исследования представляется разработка реальной распределенной телеметрической системы измерения глубины для работы в составе буксируемой кабельной погруженной геофизической косы, а также схемы системы измерения глубины зондирующего комплекса регистрации частиц.
Материалы и методы исследования
Основные вопросы терминологии измеряемых физических величин приведены в [1]. В морской погружаемой аппаратуре для измерения глубины погружения используются датчики гидростатического давления. Их основой служат тензорезистивный мост, кварцевые частотные элементы и т.д. [2]. Основным требованием к океанологическим датчикам давления является очень высокая точность, необходимая для корректных CTD-измерений [3]. Такие датчики избыточны по точности для измерения глубины погружения геологоразведочной аппаратуры и достаточно дороги.
Другим решением является создание собственных датчиков с использованием готовых мембранных модулей и готовых микроконтроллерных плат с АЦП устройств обработки для них. Разработчик вынужден при этом решать проблемы с метрологией, отладкой аналоговой и цифровой электроники и программированием, что, как минимум, неэффективно по трудозатратам и не дает гарантированного результата.
В последние годы в промышленности широко распространились распределенные системы сбора данных и управления. Это системы управления различных производственных цехов, нефте- и газопереработки, когда расстояния между пунктами диспетчеризации и объектами управления составляют сотни метров и километры. Контуры сбора данных и управления организуются при этом через SCADA-системы, установленные на промышленных компьютерах, а датчики и исполнительные механизмы коммутируются по индустриальным кабельным линиям. Обслуживанием всей этой техники занимаются специальные подразделения КИПиА предприятий. Для передачи измерительной информации от датчиков и на пропорциональные исполнительные устройства широко применяются унифицированные проводные интерфейсы 0-5В, 4-20 мА, RS-485, Ethernet, ProfiBUS, EtherCAT. Основные требования к проводным интерфейсам:
– сохранение метрологической точности данных от датчиков;
– высокая устойчивость к промышленным помехам;
– высокая скорость передачи данных.
При этом для работы в составе пространственно-распределенной телеметрической системы важным становится правильно организованный помехоустойчивый интерфейс передачи данных вдоль косы. С практической точки зрения нежелательно использование аналоговых интерфейсов (напряжением или током) из-за необходимости применения дополнительных АЦП для последующей цифровой обработки данных. Для использования в телеметрической системе косы был выбран интерфейс RS-485 [4], так как он цифровой, имеет высокую скорость передачи данных, устойчив к помехам (это особенно важно для судовой аппаратуры).
Выбираем готовый заказной индустриальный датчик давления с вариантом исполнения выходного интерфейса RS-485. Выбираем датчик абсолютного гидростатического давления со штуцером, рабочей полостью и мембраной, выполненными из нержавеющей стали. Диапазон калибровки выбираем до 25 атм, при этом перегрузочная способность по давлению закладывается до 60 атм.
Телеметрическая система измерения глубины разработана для измерения глубины погружения трех различных точек геофизической косы. При этом коса наматывается на специально разработанную лебедку с барабаном большой вместимости, снабженный многоконтактным вращающимся токосъемником. Длина полностью развернутой косы равна 2000 м от судовой лебедки до хвостовой части, при этом погружаемый горизонтальный участок, контроль глубины которого необходим, составляет 1400 м. Диапазон рабочих глубин косы – до 150 м. Она состоит из соединенных кабельной линией судового блока, трех контейнеров – датчиков давления, расположенных в начале, середине и конце погруженной части косы. Конструктивно коса представляет собой кабель нейтральной плавучести в полиэтиленовой изоляции с расположенными в нем проводными линиями геофизических датчиков, проводными линиями системы телеметрии, кевларовым силовым сердечником и прочими вспомогательными конструктивными кабельными элементами. Контейнеры представляют собой цилиндрические прочные корпуса из алюминиевого сплава с герморазъемами. Подключение контейнеров датчиков давления к косе осуществляется герметичными кабельными отводками с герморазъемами. Крепление контейнеров на косу осуществляется пластиковыми кабельными хомутами через прорезиненные тканевые прокладки, герморазъемы контрятся нержавеющей проволокой.
Контейнеры позволяют измерять абсолютное давление с диапазоном измерения давления 0–20 атм, что соответствует диапазону 0–200 м при требуемой точности 0,5 м. При этом контейнеры рассчитаны на погружение до глубины 600 м. Функциональная схема телеметрической системы измерения глубины геофизической косы представлена на рисунке 1.
Контейнер датчика давления 1 закреплен на головной части косы, контейнер датчика 2 – в средней части, а контейнер датчика 3 – в хвостовой части.
Телеметрическая система построена на основе интерфейса ModBUS RTU RS-485 под управлением программируемого логического контроллера. Физически интерфейс связи организован по витой паре. Спецификация стандарта RS-485 предполагает максимальную длину сегмента без применения усилителей 1200 м. Для обеспечения запаса устойчивости RS-485 в контейнеры 1 и 2 введены усилители-умощнители интерфейса RS-485, при этом длины отдельных сегментов интерфейса равны соответственно 600, 700 и 700 м.
Под телеметрическую систему в косу были зарезервированы две витые пары сечением 0,35 мм² в полиэтиленовой изоляции и две линии питания сечением 0,75 мм². Для подключения контейнеров датчиков давления в местах их установки на косе сделаны отводки кабелем меньшего сечения, оконцованные 7-контактными герморазъемами. Контейнеры выполнены из алюминиевого сплава с двумя торцевыми крышками и внутренним приборным шасси.
Блок управления содержит программируемый логический контроллер (ПЛК), графический индикатор, блок питания, блок реле и многоконтактные разъемы. В системе использованы промышленные датчики абсолютного гидростатического давления с рабочими камерами и мембранами из нержавеющей стали. Интерфейс датчиков ModBUS RTU RS-485, адресация настраиваемая, скорость обмена данными 9600 бит/сек, частота опроса 0,3 сек, рабочий диапазон измеряемых давлений 0–20 атм с точностью ±0,25% от ВПИ. Перегрузочная способность датчиков по гидростатическому давлению составляет 60 атм, то есть контейнер с датчиком выдерживает нештатное погружение до глубины 600 м.
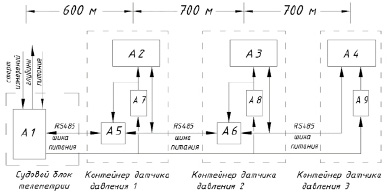
Рис. 1 Функциональная схема телеметрической системы измерения глубины геофизической косы (A1 – блок управления; A2, A3, A4 – цифровые датчики давления; A5, A6 – повторители-умощнители интерфейса RS-485; A7, A8, A9 – DC/DС импульсные стабилизаторы питания)
ПЛК обеспечивает индикацию глубин от 0 до 200 м с разрешением 1 м, выдача информации о текущих глубинах осуществляется в виде трех байт (значения от 0 до 255 м, реально датчики калиброваны, выдают даже чуть на большие значения, но разрядность байта ограничивает выходную величину).
После подачи разрешающего сигнала «Старт измерений» ПЛК замыкает контактные группы блока реле, тем самым подает на шину питания телеметрической системы посредством соответствующих контактов блока реле питающее напряжение, которое поступает на стабилизаторы напряжения А7, А8, А9, с выхода которых запитываются соответственно датчики давления А2, А3, А4 и умощнители А5, A6. Кроме того, ПЛК через соответствующие контакты блока реле запрашивает датчики давления по интерфейсу RS485 (витая пара, протокол ModBUS), получает от них величины абсолютного давления и, преобразовав в соответствующие значения глубин погружения датчиков, выводит их на графический индикатор с одновременной выдачей на внешние устройства по асинхронному интерфейсу RS-232.
В случае отсутствия разрешающего сигнала «Старт измерений» ПЛК размыкает контактные группы блока реле, что приводит к снятию питающего напряжения с шины питания телеметрической системы, а также от ПЛК отсоединяется витая пара RS-485. После этого никакие токи (за исключением внешних наводок) по шине питания и шине RS485. Это позволяет проводить косой собственно требуемые геофизические исследования без электрических помех от системы телеметрии (как правило, это различные измерения напряжений и токов с помощью АЦП высокой разрядности).
Результаты исследования и их обсуждение
Впервые работа телеметрической системы измерения глубины проверена в акватории Охотского моря. Буксировка косы осуществлялась на глубине около 50 м. Система может быть использована для настройки массы заглубителей, размеров тормозящих устройств, выбора оптимальной скорости буксировки. Опыт использования системы позволяет сделать следующие выводы.
1. Рабочий погруженный участок косы располагается не совсем горизонтально, а со снижением примерно в 2–7о (хвостовая часть ниже). Связано это с тем, что плавучесть косы не остается нейтральной при погружении.
2. При выполнении циркуляции судна (разворота на новый галс) коса заглубляется ниже рабочего горизонта, по причине чего ее желательно сматывать на лебедку
3. Система измерения глубины полезна при работе при выходе на малые глубины, для предотвращения касания косой грунта, когда данные от системы дополняются данными судового эхолота.
4. Возможно сочетание данных системы с данными гидрографических судовых навигационных систем.
Апробированные в ходе данной разработки технические решения по применению промышленных датчиков давления были использованы при проектировании высокоточной системы измерения глубины зондирующего комплекса регистрации частиц [5] в 2021–2022 гг. Схема блока управления зондирующего комплекса регистрации частиц представлена на рисунке 2.
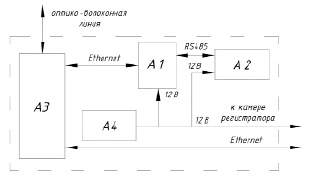
Рис. 2 Функциональная схема блока управления зондирующего комплекса регистрации частиц (A1 – преобразователь Ethernet-RS-485; A2 – датчик давления цифровой, A3 – двухканальный медиаконвертер, A4 – аккумуляторная батарея)
Опрос цифрового датчика давления выполняется так же, как и в телеметрической системе измерения глубины геофизической косы: через установленное на рабочее место оператора приложение системы промышленной автоматизации по интерфейсу RS-485 через преобразователь А1, один из Ethernet-каналов медиаконвертера А3, оптико-волоконную линию, медиаконвертер судового блока. Интерфейс датчиков ModBUS RTU RS-485, адресация настраиваемая, скорость обмена данными 9600 бит/сек, частота опроса 0,3 сек, рабочий диапазон измеряемых давлений 0–20 атм с точностью ±0,25% от ВПИ.
Выводы
Использование опыта создания надежной помехозащищенной телеметрической системы для геофизических кос позволило разработать эффективное решение для оперативного измерения глубины погружения оптического регистратора зондирующего комплекса регистрации частиц.
Работа выполнена в рамках государственного задания ИО РАН (тема № 0128-2021-0010).
Библиографическая ссылка
Оленин А.Л. ОБ ИЗМЕРЕНИИ ГЛУБИНЫ ПОГРУЖЕНИЯ МОРСКОЙ ЗОНДИРУЮЩЕЙ АППАРАТУРЫ И БУКСИРУЕМЫХ ГЕОФИЗИЧЕСКИХ КОС // Международный журнал прикладных и фундаментальных исследований. 2022. № 11. С. 72-76;URL: https://applied-research.ru/ru/article/view?id=13470 (дата обращения: 01.07.2026).
DOI: https://doi.org/10.17513/mjpfi.13470