

Введение
В настоящее время быстро растет рынок телеуправляемых аппаратов-роботов для контроля состояния разнообразных подводных объектов техногенного происхождения, число которых стремительно увеличивается.
Нефтяная и газовая промышленности используют необитаемые подводные аппараты для создания подробных карт морского дна перед началом постройки подводной инфраструктуры. В результате трубопроводы могут быть протянуты наиболее экономичным и одновременно экологичным способом.


Рис. 1. Телеуправляемые необитаемые подводные аппараты «ГНОМ Микро» и «СуперГНОМ»
Необитаемые подводные аппараты позволяют геодезическим компаниям проводить более точные исследования тех областей, где традиционные батиметрические исследования были бы менее эффективными или слишком дорогими [1]. Еще одна насущная задача – замена аппаратами-роботами сложного и опасного водолазного труда, особенно на глубинах больше 50 м и в труднодоступных местах. В военной области важные задачи – поиск и уничтожение мин и ряд других применений, таких как разведка акваторий, обследование и картирование дна, противодиверсионная и антитеррористическая защита.
Столь широкая сфера применений телеуправляемых необитаемых подводных аппаратов (ТНПА) обусловливает необходимость использования различных моделей ТНПА, характеристики которых максимально соответствуют поставленным задачам.
Институт океанологии им. П.П. Ширшова Российской академии наук (ИО РАН) более 20 лет занимается разработкой и производством телеуправляемых необитаемых подводных аппаратов (ТНПА) класса Микро «ГНОМ». Линейка продукции этого класса представлена следующими моделями: «ГНОМ Микро», «ГНОМ Стандарт», «СуперГНОМ» (рис. 1). Модели различаются рабочей глубиной, мощностью, комплектацией, что определяет их функциональность и сферу применения.
Пользователь ТНПА может выбрать нужную модель исходя из своих потребностей.
Однако производство разных моделей подразумевает необходимость использования разных комплектующих для каждой из них, что увеличивает затраты на производство. Потребности пользователя не ограничены одной задачей, часто возникает необходимость дооснащения аппарата, что не всегда возможно для конкретной модели. Кроме того, для производства ТНПА использовался ряд зарубежных комплектующих (DC-DC преобразователи, электромоторы), поставки которых в Россию сейчас ограничены. Поэтому возникла необходимость разработки новой модели, которая даст возможность пользователю самостоятельно конфигурировать ТНПА и заменит все вышеуказанные модели.
До появления такой опции пользователю было необходимо использовать несколько аппаратов, часто разных производителей. Все аппараты требуют технического обслуживания и ремонта, что создавало дополнительные трудности при эксплуатации.
Цель проекта – сделать конфигурируемый аппарат, что означает предоставить пользователю возможность самостоятельно определять состав подводного модуля, в том числе системы управления, путем установки необходимого количества движителей, видеокамер и другого оборудования, тем самым добившись нужной функциональности и характеристик ТНПА.
Метод и материалы исследования
Такой моделью стала новая разработка ИОРАН – ТНПА ГНОМ, состоящего из отдельных унифицированных модулей. За счет этого могут быть снижены затраты на производство. Для ремонта не требуются высококвалифицированные специалисты – достаточно просто заменить поврежденный узел. При этом повысились надежность и ремонтопригодность ТНПА.
Произведена замена материала прочного корпуса подводного модуля с АМГ-6 на АД-35 с целью улучшения прочностных и массогабаритных характеристик.
Продукт разработан с учетом использования современных комплектующих, доступных на российском рынке. На аппарате установлены одна или две видеокамеры с разрешением FullHD/4К. Подводный модуль может быть оснащен движителями в количестве от четырех до восьми. При этом сохранены преимущества существующей линейки продукции: малые габариты, низкое энергопотребление, относительно тонкий кабель.
Для реализации данного проекта сотрудниками лаборатории в 2024 году выполнены следующие работы:
• разработаны и изготовлены прочные корпуса подводного модуля, обеспечивающие модульность конструкции;
• разработана система питания и управления ТНПА для реализации возможности установки необходимого количества движителей (4, 6 или 8), одной или двух видеокамер разрешением не менее FullHD и дополнительного оборудования (манипулятора, лазерных указателей, гидролокатора кругового обзора, приемо-передатчиков гидроакустической навигационной системы и пр.).
Разработанная система управления позволяет удерживать аппарат в любых пространственных положениях, а также осуществлять перемещение аппарата как в земной, так и в связанной с аппаратом системе координат.
Структурно система управления состоит из блоков, отвечающих за следующие функции:
− сбор величин управляющих воздействий от пульта управления;
− сбор информации с интегрального блока датчиков;
− расчет пространственного положения и текущих скоростей ТНПА;
− анализ внешних воздействующих факторов;
− расчет управляющих воздействий (для каждого канала);
− консолидация управляющих воздействий и формирование заданий для движителей.
Система управления структурно разделена на шесть отдельных каналов расчета управляющего воздействия: три канала управления угловым положением аппарата и три канала управления линейным перемещением аппарата.
• Разработана линия передачи данных для возможности передачи видеосигнала с 2 видеокамер разрешением не хуже FullHD.
В основе разработки лежит система телекоммуникации и ретрансляции видео под одной витой паре более ранних разработок сотрудников лаборатории [2].
• Разработаны программные модули, обеспечивающие функциональность ТНПА в различных конфигурациях, а именно:
− 2 вертикальных, 2 горизонтальных движителя, 1 видеокамера;
− 2 вертикальных, 4 маршевых движителя, 1 или 2 видеокамеры;
− 8 движителей, расположенных векторно, 2 видеокамеры;
− вышеперечисленные варианты с набором дополнительного оборудования: манипулятор, лазерные указатели, навигационный комплекс: приемник – система повышения точности сигналов (DGPS); трехосевой индукционный компас, датчик ориентации с углом охвата 360°, датчики ускорений; инерционная навигационная система с доплеровским лагом [3]; гидроакустическая навигационная система, гидролокатор кругового обзора.
Аппаратная часть подводного модуля ТНПА реализована на базе микроконтроллера на ядре Cortex M4F. Надводный блок управления/питания создан на базе персонального компьютера с процессором Intel Core i5 не ниже 7-го поколения.
Программное обеспечение подводного модуля написано на языке программирования С и совместимо с контроллерами на базе ядра Cortex M4F. Программное обеспечение береговой станции написано на языке программирования С++ и совместимо с операционными системами семейства Linux Ubuntu.
• Выполнены математическое моделирование и расчет гидродинамики ТНПА, в частности выполнен расчет на прочность всех дорабатываемых узлов при воздействии гидростатического давления, равного 1,5 МПа.
Проведен расчет плавучего объема, нейтральная плавучесть погружного модуля достигается без использования поплавков. По результатам компьютерного моделирования гидродинамики ТНПА получены уравнения сил и моментов сопротивления, которые использованы для создания математической модели ТНПА и синтезирования системы управления.
Получены массогабаритные параметры дорабатываемого продукта:
− масса подводного модуля в зависимости от конфигурации будет составлять от 5 до 10 кг;
− габаритные размеры располагаются в пределах 420–470 мм x 380–400 мм x 270–300 мм.
Для расчета максимальной скорости ТНПА в трех направлениях (марш, лаг, глубина) были использованы данные компьютерного моделирования гидродинамики ТНПА. Результаты расчетов приведены в таблице 1.
Таблица 1
Расчетная максимальная скорость ТНПА
|
Vx max (марш) |
1,9 м/с |
|
Vy max (глубина) |
0,9 м/с |
|
Vz max (лаг) |
1 м/с |
• Проведена разработка дизайна и конструкции ТНПА с модульной структурой:
− определена структура движительно-рулевого комплекса в трех вариантах;
− составлена математическая модель динамики привязной подводной системы [4];
− разработана компоновка ТНПА для обеспечения необходимого количества степеней свободы для каждого из вариантов;
− реализована возможность подключения дополнительного оборудования конечным пользователем.
В результате комплекса проведенных работ реализованы следующие новые функции и/или характеристики ТНПА:
• реализована возможность конфигурирования подводного модуля путем установки необходимого количества движителей, видеокамер и другого оборудования;
• новая модель ТНПА ГНОМ состоит из отдельных унифицированных модулей;
• реализована возможность установки одной или двух видеокамер с разрешением не хуже FullHD;
• подводный модуль в зависимости от выбранной конфигурации имеет до 6 степеней свободы.
Изготовлены опытные образцы ТНПА ГНОМ в различных конфигурациях (рис. 2), состоящие из подводного и берегового модулей. Подводный модуль представлен в виде телеуправляемого необитаемого подводного аппарата класса Микро. Модульная структура ТНПА позволит проводить техническое обслуживание отдельных модулей без полного разбора погружного модуля. Погружной модуль поддерживает стабилизацию по курсу, крену, дифференту, глубине.
Характеристики разработанного ТНПА ГНОМ представлены в таблице 2.
Состав подводного модуля:
• 4, 6 или 8 движителей;
• одна или две 4K/Full HD камеры с управлением фокуса и зума;
• два передних и два задних светильника по 10 Вт, поддерживающих регулировку цветовой температуры;
Таблица 2
Характеристики ТНПА ГНОМ
|
Габаритные размеры*, мм |
420–470 * 380–400 * 270–300 |
|
Глубина погружения, м |
До 200 |
|
Мощность*, Вт |
300–600 |
|
Масса*, кг |
5–10 |
|
Количество движителей*, шт. |
4, или 6, или 8 |
|
Количество видеокамер*, шт. |
1 или 2 |
|
Количество осветителей*, шт. |
2 или 4 |
Примечание:* – в зависимости от выбранной конфигурации.
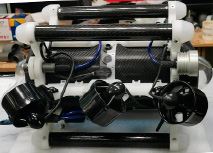

Рис. 2. 6- и 8-моторные версии ТНПА ГНОМ
• манипулятор;
• альтиметр/эхолот, позволяющий избегать столкновений с различными препятствиями [5];
• датчик давления;
• инерциальный измерительный модуль;
• дополнительное оборудование: ТНПА может содержать гидролокатор кругового обзора, гидроакустическую навигационную систему и т.п.;
• основной блок электроники, выполненный в виде герметичного цилиндрического корпуса с разъемами на крышке.
Состав берегового модуля (рис. 3):

Рис. 3. Береговой модуль – береговая станция ТНПА с пультом управления
• кабельная катушка, оснащенная скользящим контактом. Длина кабеля до 300 м;
• блок питания/управления, который выполнен в виде кейса с ЖК-монитором высокой яркости для отображения телеметрии и видеоизображения. Блок управления поддерживает режим записи видеоизображения, скриншоты, комментарии поверх фотографии. Дополнительное оборудование блока управления: клавиатура, манипулятор типа «мышь» и т.п.;
• пульт управления. Пульт управления поддерживает:
− режим управления фокусом и зумом видеокамеры;
− управление движительно-рулевым комплексом ТНПА;
− регулировку светильников;
− управление манипулятором.
Результаты исследования и их обсуждение
В результате работ создан подводный аппарат с возможностью изменения конфигурации. В дальнейшем запланировано проведение натурных испытаний опытных образцов ТНПА в различных конфигурациях, по результатам которых, возможно, потребуются доработка дизайна и конструкции новой модели, доработка программного обеспечения.
На заключительном этапе проекта запланирована разработка эксплуатационной и конструкторской документации.
Заключение
Весьма важно отметить, что аппараты рассчитаны как на профессиональные применения, так и на рынок хобби или развлечений – рыболовов, дайверов и т.д. Поэтому они должны иметь привлекательный дизайн и небольшие вес и габариты. Кроме того, для массового производства необходимы технологичная конструкция и разного рода приспособления типа пресс-форм и др. Созданный аппарат – это шаг в направлении модернизации и оптимизации остальных моделей ТНПА ГНОМ.
Библиографическая ссылка
Шерстов Е.А., Розман Б.Я., Елкин А.В. РАЗРАБОТКА НОВОЙ МОДЕЛИ ТЕЛЕУПРАВЛЯЕМОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА ГНОМ С МОДУЛЬНОЙ СТРУКТУРОЙ // Международный журнал прикладных и фундаментальных исследований. 2024. № 11. С. 55-59;URL: https://applied-research.ru/ru/article/view?id=13673 (дата обращения: 15.06.2026).
DOI: https://doi.org/10.17513/mjpfi.13673