

В статье приводится алгоритм, программа и результаты расчетов, построенных на приближенной математической модели динамически нагруженных подшипников поршневого пальца с учетом методики расчета статически нагруженных подшипников скольжения.
Приближенная математическая модель описывает взаимосвязь выходных параметров подшипников поршневого пальца с эксплуатационными и конструктивными факторами. Модель построена на основе методики М.В. Коровчинского по гидродинамическому расчёту статически нагруженных подшипников скольжения [1]. При создании модели производилась аппроксимация приведенных в указанных источниках табличных данных сравнительно простыми, но достаточно точными аналитическими выражениями. Аппроксимация производилась с помощью разработанной автором программы в среде MATLAB. Ввод исходных данных и вывод результаты расчетов осуществляется с помощью удобного интерфейса.
Определяемые с помощью аппроксимируемых таблиц величины зависят от трех параметров: от угловой протяженности смазочного слоя или угла охвата (120°, 180°), от относительного эксцентриситета χ (0,4 ÷ 0,99) и от отношения длины поршневой головки к диаметру поршня l/d (0,4 ÷ 1,5). Рассматриваемые подшипники работают в условиях малых угловых скоростей шипа и низкой вязкости масла.
Перед вычисление необходимо ввести заданные (не меняющиеся) параметры: давление подачи смазки; удельная теплоемкость масла; удельная масса масла; диаметр поршня. Вводятся следующие ограничения: длины поршневой головки l; диаметрального зазора подшипника D; динамическая вязкость масла m; максимального гидродинамического давления Pmax; оценки динамической нагруженности подшипника в условиях полужидкостного и граничного трения Pz; приращения температуры смазочного слоя ∆T; 0 эксцентриситета c; отношения длины поршневой головки к диаметру поршня l/d.
Искомыми параметрами являются: l – длина поршневой головки; D – диаметральный зазор подшипника; m – динамическая вязкость масла.
Оптимизация параметров подшипника осуществляется методом градиентного спуска [2]
Интерфейс программы представлен на рисунке.
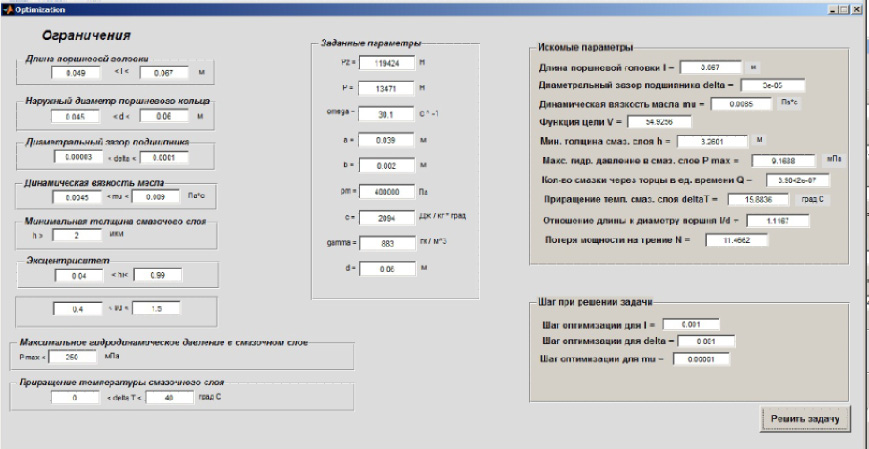
При заданных ограничениях и входных параметрах программа позволяет рассчитать оптимальные размеры подшипника.
Ключевые слова: оптимизация, гидродинамический расчет, подшипники поршневого пальца.
Библиографическая ссылка
Завьялов О.Г. ОПТИМИЗАЦИЯ ПОДШИПНИКА СКОЛЬЖЕНИЯ ПОРШНЕВОГО ПАЛЬЦА ТРАКТОРНОГО ДВИГАТЕЛЯ // Международный журнал прикладных и фундаментальных исследований. 2014. № 1. С. 59-60;URL: https://applied-research.ru/ru/article/view?id=4557 (дата обращения: 05.07.2026).