

Известны аналог [1] и прототип [4] – микроконтроллерные энергонезависимые устройства контроля тока нагрузки станций катодной защиты (СКЗ) магистральных газопроводов (МГ), проектирование которых основано на известных методиках синтеза микроконтроллерных конечных автоматов [2, 3, 8, 9, 14-16].
Аналог [1] и прототип [4] имеют в своем составе: 8-битный микроконтроллер (МК) – PIC16F628 фирмы «Microchip», содержащий FLASH-память программ, SRAM-память данных и энергонезависимую EEPROM-память данных [18-21], в которой сохраняется заданное значение тока нагрузки СКЗ МГ при аварийном отключении питания и восстанавливается заданное значение тока нагрузки при восстановлении питания; кварцевый резонатор с конденсаторами связи, подключенный к МК; конденсатор фильтра по цепи питания МК; две кнопки ручного управления на увеличение и уменьшение тока нагрузки СКЗ при отключении комплекса телемеханики (ТМ); цифро-аналоговый преобразователь (ЦАП) на основе резисторной матрицы «R-2R» [10-12, 24], с выхода которого подается сигнал в блок управления СКЗ для поддержания требуемого тока нагрузки. Аналог [1] и прототип [4] отличаются только запрограммированным алгоритмом работы [22, 23] МК – PIC16F628 и обоим им присущи следующие существенные недостатки:
- Большие затраты ресурса работы энергонезависимых ячеек EEPROM-памяти данных МК [9], так как в соответствии с алгоритмами работы МК [1, 4] даже при однократном регулировании тока нагрузки СКЗ может происходить до 256 циклов «стирание-запись» энергонезависимых ячеек EEPROM-памяти МК – PIC16F628.
- Низкая надежность устройства, так как повышение напряжения в подводящих цепях комплекса ТМ к МК до уровня превышающего +5 В, а также понижение напряжения ниже 0 В может иногда приводить к выходу из строя МК.
- Невысокая точность ЦАП аналога и прототипа [1, 4], так как даже при полном согласовании применение в резисторной матрицы «R-2R» ЦАП резисторов с разбросом номиналов 0,5 % интегральная ошибка регулирования тока нагрузки СКЗ составляет не менее 5 %.
Постановка задачи. Предлагаемое «Микроконтроллерное энергонезависимое устройство контроля тока нагрузки СКЗ МГ» [20] должно обеспечивать решение следующих задач:
- регулирование тока нагрузки СКЗ МГ по управляющим сигналам от комплекса ТМ и вручную непосредственно на СКЗ;
- запоминание ранее заданного значение тока нагрузки СКЗ МГ при аварийном отключении питания на СКЗ и автоматическое восстановление ранее заданного значения тока нагрузки при восстановлении питания;
- устранение трех перечисленных ранее недостатков аналога и прототипа [1, 4].
Принципиальная электрическая схема устройства. Принципиальная электрическая схема микроконтроллерного энергонезависимого устройства контроля тока нагрузки СКЗ МГ [20] представлена на рис. 1.
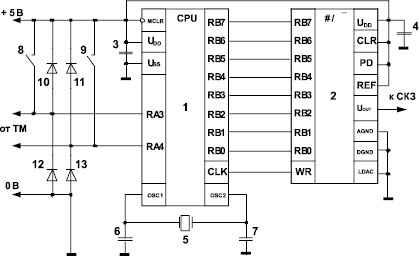
Рис. 1. Принципиальная электрическая схема микроконтроллерного энергонезависимого устройства контроля тока нагрузки СКЗ МГ: 1 – МК – PIC16F628 фирмы «Microship»; 2 – ЦАП – AD7302 фирмы «Analog devices»; 3 и 4 – конденсатор фильтра – 0.1 мкФ; 5 – кварцевый резонатор – 4,0 МГц; 6 и 7 – конденсаторы связи – 27 пФ; 8 и 9 – кнопки ручного управления током нагрузки на СКЗ; 10-13 –защитные диоды КД105Б
Поставленная задача достигается тем, что в микроконтроллерное энергонезависимое устройство контроля тока нагрузки СКЗ МГ [20], содержащее (см. рис. 1): 8-битный МК – PIC16F628 (позиция 1 на рис. 1) с FLASH-памятью программ объемом 2048 байт, SRAM-памятью данных – 224 байта и энергонезависимой EEPROM-памятью данных – 128 байт [13]; конденсатор фильтра – 0,1мкФ (позиция 3) по цепям питания UDD и USS МК – PIC16F628; кварцевый резонатор – 4 МГц (позиция 5) с двумя конденсаторами связи – 27 пФ (позиции 6 и 7), подключенный к выводам OSC1 и OSC2 кварцевого генератора МК – PIC16F628; две кнопки ручного управления «Увеличение» и «Уменьшение» (позиции 8 и 9) тока нагрузки на СКЗ при отключении комплекса ТМ; две клеммы для подключения устройства к комплексу ТМ (на рис. 1 – «от ТМ»), введены: параллельный ЦАП – AD7302 (позиция 2) [17, 19], выводы которого UDD, CLR, PD и REFIN подключены к шине +5 В, выводы AGND, DGND и LDAC к шине 0 В, восемь линий порта В (RB0-RB7) приема двоичной информации ЦАП – AD7302 подключены к восьми линиям порта В (RB0-RB7) МК – PIC16F628, настроенным на вывод двоичной информации, вывод разрешения ввода информации WR ЦАП – AD7302 соединен с выходом синхронизации CLK МК – PIC16F628, а с вывода UOUT ЦАП – AD7302 аналоговый управляющий сигнал подается на объект управления (на рис. 1 – «к СКЗ»); конденсатор фильтра – 0,1мкФ (позиция 4) по цепям питания UDD и AGND АЦП – AD7302; четыре защитных диода – КД105Б (позиции 10-13) [5-7], подключенные по два диода к каждой из двух линий порта А (RA3 и RA4) МК – PIC16F628, настроенных на вход и подключенных к комплексу ТМ (на рис. 1 –«от ТМ»), причем два диода (позиции 10 и 12) осуществляют защиту от перегрузок МК – PIC16F628 по входу RA3, а два диода (позиции 11 и 13) – по входу RA4.
Обобщенная блок-схема алгоритма работы 8-битного МК – PIC16F628 (позиция 1 на рис. 1) в микроконтроллерном энергонезависимом устройстве контроля тока нагрузки СКЗ МГ (рис. 1) представлена на рис. 2, где всем номерам блоков 1Б-12Б присвоена буква Б, что означает их принадлежность к блок-схеме (рис. 2) и обеспечивает отличие от обозначения позиций на рис. 1.
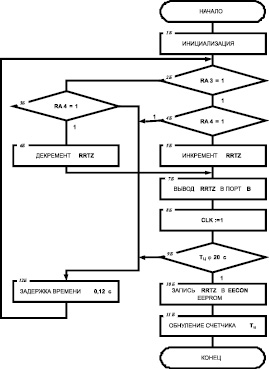
Рис. 2. Обобщенная блок-схема алгоритма работы 8-битного МК – PIC16F628 в микроконтроллерном энергонезависимом устройстве контроля тока нагрузки СКЗ МГ
Режимы работы устройства
1. Ввод в эксплуатацию. В данном режиме всегда осуществляется инициализация МК – PIC16F628 (позиция 1 на рис. 1), которая показана блоком 1Б на рис. 2. Инициализация МК сводится к выполнению следующих основных операций: собственно инициализации МК и его специальных регистров; настройке на вход линий RA3 и RA4 порта А МК, которые показаны блоками 2Б-4Б на рис. 2; настройке на выход линий RB0-RB7 (20-27, соответственно) порта В (показан в блоке 7Б на рис. 2) МК; выделению в SRAM-памяти данных МК 8-битного регистра результата изменения тока защиты – RRTZ (показан в блоках 5Б-7Б и 10Б на рис. 2); записи в регистр RRTZ содержимого 8-битного регистра EECON (показан в блоке 10Б на рис. 2) энергонезависимой EEPROM-памяти данных МК; обнулению счетчика времени регулирования тока защиты ТЦ, (блок 9Б на рис. 2), который включается в работу при появлении управляющих сигналов от комплекса ТМ на СКЗ.
2. Управляющий режим. В этом режиме, например, от комплекса ТМ на микроконтроллерное энергонезависимое устройстве контроля тока нагрузки СКЗ МГ подается управляющий сигнал на увеличение тока нагрузки СКЗ (см. рис. 2): на входе RA3=1 (блок 2Б на рис. 2) МК появляется «единичный» потенциал; запускается в работу счетчик времени регулирования тока защиты ТЦ, (блок 9Б на рис. 2); выполняется условие RA3=1 в блоке 2Б, но не выполняется условие RA4=1 в блоках 3Б и 4Б – сигнала на уменьшение тока нагрузки СКЗ нет (RA4=0); в блоке 5Б происходит инкрементация регистра RRTZ; в блоке 7Б информация из регистра RRTZ выводится в порт В (RB0-RB7); в блоке 8Б на управляющем выводе CLK МК (позиция 1 на рис. 1) появляется сигнал, запускающий по входу WR в работу ЦАП (позиция 2 на фиг.1), на выходе UOUT которого присутствует аналоговый управляющий сигнал, пропорциональный содержимому регистра RRTZ, который подается в блок управления выпрямителя СКЗ; если в блоке 9Б условие Т20 с (20 с достаточно для изменения содержимого регистра RRTZ от 0 до 255) не выполняется, то в блоке 12Б осуществляется технологическая выдержка времени 0,12 с, а далее продолжается анализ состояния входов RA3 и RA4 (рис. 2) и т.д.; если условие ТЦ20 с выполняется (процесс регулирования тока нагрузки СКЗ завершен), то осуществляется запись содержимого регистра RRTZ в регистр EECON энергонезависимой EEPROM-памяти МК (блок 10Б на рис. 2); в завершение режима обнуляется счетчик времени регулирования тока защиты ТЦ (блок 11Б на рис. 2).
При поступлении от комплекса ТМ на микроконтроллерное энергонезависимое устройство контроля тока нагрузки СКЗ МГ управляющего сигнала на уменьшение тока нагрузки СКЗ процессы аналогичны, но в этом случае RA3=0, а RA4=1 (рис. 2), и следовательно в блоке 6Б будет производиться декрементация содержимого регистра RRTZ.
Таким образом, информация о установленном значении тока нагрузки СКЗ записана и хранится в регистре EECON энергонезависимой EEPROM-памяти МК, причем перезапись ячейки EEPROM-памяти МК производится только один раз в процессе проводимого регулирования тока СКЗ, что на два порядка экономит ресурс энергонезависимой EEPROM-памяти МК по сравнению с аналогом [1] и прототипом [4].
3. Первый адаптивный режим возникает при случайном – не санкционированном (аварийном) отключении электропитания СКЗ от промышленной сети 220/380 В. Естественно, что в таком случае СКЗ отключается из работы, ток нагрузки отсутствует и устройство обесточено, но в энергонезависимой EEPROM-памяти МК (позиция 1 на рис. 1) в регистре EECON сохраняется 8-битная информация о величине тока нагрузки СКЗ МГ до отключения электропитания СКЗ от промышленной сети.
При восстановлении электропитания СКЗ от промышленной сети 220/380 В на шинах питания +5 В и 0 В микроконтроллерного энергонезависимого устройства контроля тока нагрузки СКЗ МГ (рис. 1) восстанавливается питающее напряжение и происходит инициализация МК (позиция 1 на рис. 1), которая детально описана в первом режиме работы.
Таким образом, информация о величине последнего установленного тока нагрузки СКЗ МГ, сохраненная в регистре EECON энергонезависимой EEPROM-памяти данных, записывается в регистр RRTZ SRAM-памяти данных МК (позиция 1 на рис. 1) и выводится через порт В МК на ЦАП (позиция 2 на рис. 1), на выходе которого UOUT формируется тот же сигнал управления, что присутствовал до отключения электропитания СКЗ, и ток нагрузки СКЗ восстанавливается до исходного рабочего значения.
4. Второй адаптивный режим может возникнуть при сбоях в комплексе ТМ, когда одновременно имеют место сигналы на увеличение тока нагрузки RA3=1 и на уменьшение тока нагрузки RA4=1 (блоки 2Б-4Б на рис. 2). В этом режиме МК работает по следующим ветвям алгоритма (рис. 2): блок 2Б, блок 4Б, блок 12Б, возврат к блоку 2Б и т.д.
Таким образом, рассмотренный режим для обобщенного алгоритма работы МК (позиция 1 на рис. 2.) микроконтроллерного энергонезависимого устройства контроля тока нагрузки СКЗ МГ тоже не является аварийным, так как не приводит к изменению сигналов на выходах МК и ЦАП (позиции 1 и 2 на рис. 1).
5. Режим устранения перегрузок по входным цепям МК от комплекса ТМ может возникать в двух ситуациях:
- при повышении напряжения помехи от цепей комплекса ТМ на линиях RA3 и RA4 порта А МК – PIC16F628 (позиция 1 на рис. 1) выше напряжения шины питания >5 В (рис. 1) два диода – КД105Б (позиции 10 и 11 на рис. 1) открываются и, следовательно, перегрузка устройства не происходит;
- при понижении напряжения помехи от цепей комплекса ТМ на линиях RA3 и RA4 порта А МК – PIC16F628 (позиция 1 на рис. 1) ниже напряжения шины питания <0 В (рис. 1) два диода – КД105Б (позиции 12 и 13 на рис. 1) открываются и, следовательно, перегрузка устройства тоже не происходит.
Таким образом, помехи от цепей комплекса ТМ не влияют на работоспособность микроконтроллерного энергонезависимого устройства контроля тока нагрузки СКЗ МГ.
6. Ручной режим работы в микроконтроллерном энергонезависимом устройстве контроля тока нагрузки СКЗ применяется при отключении (неисправности) комплекса ТМ. В этом режиме две кнопки ручного управления «Увеличение» и «Уменьшение» (позиции 8 и 9 на рис. 1, соответственно) позволяют имитировать входные сигналы на линиях RA3 и RA4 порта А МК – PIC16F628 (позиция 1 на рис. 1), соответственно, что приводит к повторению режима управления (см. 2. Управляющий режим).
Выводы
Введение в микроконтроллерное энергонезависимое устройство контроля тока нагрузки СКЗ МГ параллельного ЦАП – AD7302 фирмы «Analog devices» с конденсатором фильтра – 0,1мкФ и четырех защитных диодов – КД105Б обеспечивает существенное расширение функциональной полноты устройства:
- При отключении электропитания СКЗ МГ от промышленной сети 220/380 В и последующем его восстановлении, ток нагрузки СКЗ автоматически восстанавливается до исходного значения без внешних воздействий.
- Сокращение использования ресурса работы (циклов «стирание-запись») энергонезависимых ячеек EEPROM-памяти данных МК на два порядка.
- Точность преобразования управляющих сигнала СКЗ МГ из цифровой формы в аналоговую увеличена на порядок – до 0,5 %.
- Управление током нагрузки СКЗ МГ в автоматическом режиме от комплекса ТМ и в ручном режиме непосредственно на СКЗ.
- Повышение надежности устройства при нестабильностях напряжения в подводящих цепях комплекса ТМ.
Библиографическая ссылка
Анкудинов К.А., Карпов Е.Б., Карпова Т.Е. МИКРОКОНТРОЛЛЕРНОЕ ЭНЕРГОНЕЗАВИСИМОЕ УСТРОЙСТВО КОНТРОЛЯ ТОКА НАГРУЗКИ СТАНЦИЙ КАТОДНОЙ ЗАЩИТЫ МАГИСТРАЛЬНЫХ ГАЗОПРОВОДОВ // Международный журнал прикладных и фундаментальных исследований. 2014. № 5-2. С. 9-13;URL: https://applied-research.ru/ru/article/view?id=5327 (дата обращения: 01.07.2026).