

Рассмотрим движения плоского механизма, у которого шатун имеет конечное упругое перемещение (растяжение и сжатие). Например, механизмы прокладывания уточной нити ткацких станков типа СТБ, такие как боевой механизм, четырехцветный и шестицветный механизм смены утка, механизм торможения прокладчика представляют собой кулачково-рычажные механизмы с упругими звеньями и связями. Рабочий процесс в этих механизмах осуществляется за счет потенциальной энергии закрученного вала или сжатых цилиндрических пружин.
В плоском четырехзвенном механизме (рис. 1) упругий шатун жесткостью с может быть рассмотрен как и нестационарная связь, поскольку относительное перемещение точек А и В двух различных звеньев зависит от величины силы, действующей вдоль упругого шатуна.
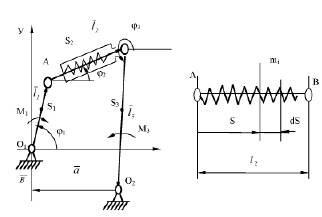
Рис. 1 . Двухкоромысловый механизм с упругим шарниром
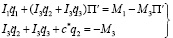
Математическое выражение деформации упругого звена позволяет объединить в одну систему уравнения движения твердых тел, расположенных по обе стороны упругого звена. Задача в этом случае будет сведена к отысканию основного движения кривошипа и коромысла как системы твердых тел, и дополнительного движения, определяемого упругой характеристикой шатуна. Нами получено дифференциальное уравнение для определения перемещения упругого шатуна в виде:
 , (1)
, (1)
где  – изменение длины шатуна.
– изменение длины шатуна.
Из уравнения (1), как частный случай, получится известное выражение для малых упругих перемещений [1]. Получена система уравнений, описывающая движение двухкоромыслового механизма с упругим шатуном в виде:
 , (2)
, (2)
где
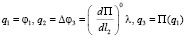 (3)
(3)
«0» положение при  ,
,  и
и  – моменты инерции и моменты сил. Если считать, что ведущее звено вращается с постоянной угловой скоростью
– моменты инерции и моменты сил. Если считать, что ведущее звено вращается с постоянной угловой скоростью  – то движение описывается уравнением
– то движение описывается уравнением
 , (4)
, (4)
где 
 П – функция положения.
П – функция положения.
На основе разработанной методики рассматриваются вопросы построения моделей механизмов прокладывания уточной нити и исследования движения механизмов с учетом упругости звеньев. Механизм подачи и прокладывания уточных нитей станков СТБ (ткацких станков) представляют из себя плоские и пространственные кулачково-рычажные механизмы переменной структуры с упругими звеньями и связями. В них за один цикл работы изменяются вид механизмов, ведущие звенья, число степеней свободы и подвижных звеньев, характер упругих звеньев и связей и др. поэтому выбор расчетных схем механизмов и составление их математических моделей проведены с учетом структуры и характера осуществляемого ими движения.
На рис. 2 представлена конструктивная схема механизма смены цвета утка станков-автоматов СТБ и его расчетная схема, представляющая из себя, соединение двух коромысловых механизмов с упругими шатунами.
На рис. 3. представлены динамические модели механизма смены цвета при сжатии и расжатии пружин.
Процесс смены цвета осуществляется за счет расжатия пружин. Движение системы происходит под действием моментов упругих сил  и
и  со стороны аккумуляторов-пружин 5 и 6.
со стороны аккумуляторов-пружин 5 и 6.
За обобщенные координаты примем углы поворота трехплечих рычагов  и
и  от вертикального положения. Функции положения и передаточные функции используем из работы [2].
от вертикального положения. Функции положения и передаточные функции используем из работы [2].
Обобщенные силы упругих сил и сил сопротивления определяются из равенств
 (5)
(5)
Считая, что центры тяжести трехплечих рычагов находятся в точке О, суммирующего рычага в точке С, приведенный к звену 14 момент инерции нижней (правой) части постоянный и, пренебрегая вращательным движением тяги, для кинетической энергии системы получим следующее выражение:
 (6)
(6)
где

Подставив их в (6), получим

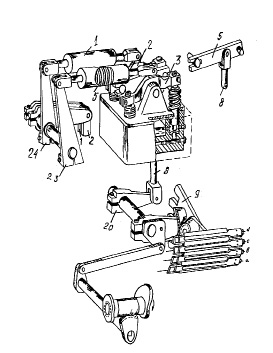
Рис. 2. Конструктивная схема механизма смены цвета станков-автоматов СТБ
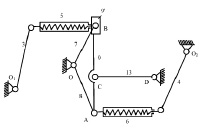
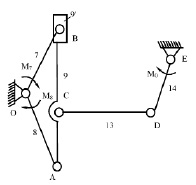
Рис. 3. Расчетная схема механизма в процессе сжатия и растяжения пружин
где



Тогда уравнения движения механизма примут следующий вид


 (7)
(7)
где 
 МП – приведенный момент сил тяжести звеньев, нижней части механизма.
МП – приведенный момент сил тяжести звеньев, нижней части механизма.
Во многих системах возникает необходимость учета массы деформируемого звена. Это связано с тем, что упругое звено имеет массу того же порядка или даже больше, чем жесткие звенья, и как следствие, оно является источником инерционных возбуждающих сил. Например, в механизмах смены цвета утка ткацких станков [3] движение осуществляется за счет деформации (сжатие-растяжение) упругого шатуна, причем его масса больше массы кривошипа и коромысла. Показано, что кинетическая энергия упругого шатуна определяется из выражения

где  – составляющая относительной скорости точки
– составляющая относительной скорости точки  вдоль шатуна; b – угол между векторами
вдоль шатуна; b – угол между векторами  и
и  ; I2 – переменный момент инерции шатуна.
; I2 – переменный момент инерции шатуна.
Получена система уравнений, описывающая движение плоского четырехзвенного механизма с учетом масс упругого шатуна в виде:
 (8)
(8)
где  – уравнение связи.
– уравнение связи.
Решением систем уравнений (2) определяются законы движения двухкоромыслового механизма при известном перемещении (деформации) центра тяжести упругого звена, определяемого из уравнения (1). Указанные законы движения, для периодов сжатия и разрядки, определяются из систем уравнений (8) с учетом массы упругого шатуна.
Библиографическая ссылка
Уалиев З.Г., Уалиев Г., Уалиева И.М. МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ ДВИЖЕНИЯ ДВУХКОРОМЫСЛОВОГО МЕХАНИЗМА С УЧЕТОМ МАССЫ УПРУГОГО ШАТУНА // Международный журнал прикладных и фундаментальных исследований. 2015. № 8-1. С. 31-34;URL: https://applied-research.ru/ru/article/view?id=7034 (дата обращения: 21.07.2026).