

В [1‒3] была описана сущность работы шестикоординатного манипулятора (пространственного механизма) и область его использования. Рассмотрим только оригинальную часть данного механизма. Кинематику опорно-поворотного устройства 5 пространственного манипулятора будем рассматривать при произвольном перемещении стержней 1 и 2 (рис. 1–2). Для упрощения схемы, на рис. 1–2, не показаны опоры и выходное звено (рабочий стол). Черным цветом показано начальное положение механизма, синим цветом – при изменении длины одного стержня и красным цветом – при изменении длины второго стержня (конечное положение).
Исходные данные:
O1O3 = O1O′3 = l1 – первоначальная длина левого стержня,
О2О4 = l2 – первоначальная длина правого стержня,
O1O′′3 = l1 + Δl1 – длина левого стержня после перемещения на величину Δl1,
О2О′4 = l2 + Δl2 – длина правого стержня после перемещения на величину Δl2,
О1О2 = a, О1О4 = О1О′4 = b, О3О4 = О′3О′4 = = О′′3О′′4 = c.
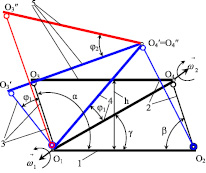
Рис. 1. Схема перемещения фрагмента манипулятора при движении стержня 2, а потом стержня 1
В общем случае:  ,
,  ,
,  .
.
Считаем, что первоначальное положение управляемой платформы определяется горизонтальным положением опорно-поворотного устройства 5 (рис. 1–2).
Цель исследования
Определим углы поворотов наклонной платформы 4 и опорно-поворотного устройства 5 при перемещении стержней 1 и 2.
1a) Перемещение правого стержня 2, на величину Δl2
Левый стержень, при этом, не меняет своей длины и поворачивается по дуге окружности, радиусом R1 = l1, а наклонная платформа 4 поворачивается по дуге окружности, радиусом R2 = b на угол φ1.
O2O′24=а2+b2 – 2a∙b∙cos(φ1 + γ), O2O′4 = l2 + Δl2, откуда
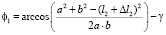 (1)
(1)
1б) Перемещение левого стержня 3, на величину Δl1
Правый стержень, при этом, не меняет своей длины, остается на месте, а по дуге окружности, радиусом R3 = c, поворачивается опорно-поворотное устройство 5 на угол φ2.
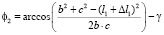
O1O′′23 = b2+c2 – 2b∙c∙cos(φ2 + γ), O1O′′3 = l1 + Δl1, откуда
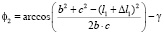 (2)
(2)
Теперь поменяем последовательность движений стержней 2 и 3:
2а) Перемещение левого стержня 3, на величину Δl1
Правый стержень, при этом, не меняет своей длины, остается на месте, а по дуге окружности, радиусом R3 = c, поворачивается опорно-поворотное устройство 5 на угол φ2.
O1O′′23 = b2+c2 – 2b∙c∙cos(j2 + γ), O1O′′3 = l1 + Δl1, откуда
 (3)
(3)
2б) Перемещение правого стержня 2, на величину Δl2
Левый стержень, при этом, не меняет своей длины и поворачивается по дуге окружности, радиусом R1 = l1 + Δl1, а наклонная платформа 4 поворачивается по дуге окружности, радиусом R2 = b на угол j1.
O2O′′24 = a2+b2 – 2a∙b∙cos(j1 + α), O2O′4 = l2 + Δl2, откуда
 (4)
(4)
Сравнивая рис. 1 и рис. 2 видно, что при изменении последовательности поворотов стержней 2 и 3 итоговое положение опорно-поворотного устройства 5 не изменилось.
Итак, задавая перемещения стержней Δl1 и Δl2 или углы поворотов φ1 и φ2 (как обобщенные координаты), определяем углы поворотов данных стержней. Так как эти стержни связаны с опорно-поворотным устройством 5, на котором расположен рабочий стол, то зная углы поворотов стержней можно определить положение рабочего стола.
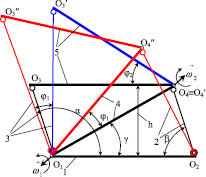
Рис. 2. Схема перемещения фрагмента пространственного механизма при движении стержня 1, а потом стержня 2
Теперь рассмотрим кинематику опорно-поворотного устройства 5 пространственного манипулятора при j2 = j1 (и φ1 = φ2).
Из рис. 1–2 видно, что при φ2 = φ1 (и φ1 = φ2) рис. 1 преобразуется в рис. 3, а рис. 2 в рис. 4. Таким образом, опорно-поворотное устройство 5 опять заняло горизонтальное положение, т.е. произошло поступательное перемещение опорно-поворотного устройства 5. Так как φ2=φ1, то из выражений (1) – (4) имеем:
 ,
,
откуда

или
 . (5)
. (5)
Рассмотрим частный случай перемещения опорного стола 5 когда φ2 = φ1 и φ1 = φ2 (рис. 3–4).
Таким образом, соблюдая соотношение (5) можно добиться поступательного вертикального перемещения опорно-поворотного устройства 5 пространственного манипулятора в общем виде.
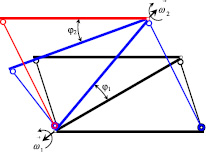
Рис. 3. Схема перемещения фрагмента пространственного механизма при движении стержня 2, а потом стержня 1 при φ2 = φ1
В макете пространственного манипулятора конструктивные параметры подобраны так, что a = c. Тогда из выражения (5) найдем:
 . (6)
. (6)
Соблюдая условие (6) для манипулятора вида (рис. 5) также можно добиться поступательного перемещения рабочего стола манипулятора. Для нашего макета l1 = l2. Тогда Δl1 = Δl2, т.е. для поступательного перемещения опорно-поворотного устройства данного макета манипулятора необходимо перемещение стержней 2 и 3 вдоль своей оси на равные величины.
Из [4] известно, что поступательное движение твердого тела получается в 4-х случаях:
1. Поступательных движений твердого тела;
2. Двух вращательных движений твердого тела с равными антипараллельными угловыми скоростями;
3. Винтового движения твердого тела и пары вращений;
4. Двух винтовых движений твердого тела с параллельными осями и равными антипараллельными угловыми скоростями.
В нашем случае – это второй вариант. Отсюда видно, что:
 , т.е.
, т.е.  , где ω1 и ω2 – угловые скорости наклонной платформы и опорно-поворотного устройства, соответственно.
, где ω1 и ω2 – угловые скорости наклонной платформы и опорно-поворотного устройства, соответственно.
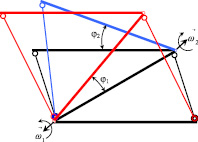
Рис. 4. Схема перемещения фрагмента пространственного механизма при движении стержня 2, а потом стержня 1 при φ1 = φ2
Выводы
1. Доказано, что конечные повороты наклонной платформы и опорно-поворотного устройства идентичны, т.е. эти повороты – коммутативны. Таким образом, схемное решение шестикоординатного манипулятора обеспечивает независимость исполнительных движений, в том числе независимость последовательности исполнительных парциальных движений.
2. Соблюдая соотношение (5) можно добиться поступательного вертикального перемещения опорно-поворотного устройства 5, а значит и рабочего стола пространственного манипулятора в общем виде.
Библиографическая ссылка
Шамутдинов А.Х. КОНЕЧНЫЕ ПОВОРОТЫ ЭЛЕМЕНТОВ ОРИГИНАЛЬНОЙ ЧАСТИ ПРОСТРАНСТВЕННОГО МАНИПУЛЯТОРА // Международный журнал прикладных и фундаментальных исследований. 2015. № 10-5. С. 782-784;URL: https://applied-research.ru/ru/article/view?id=7625 (дата обращения: 23.06.2026).