

В период бурного развития авиации предложено множество схем различных летательных аппаратов. В силу разных причин (трудностей практической реализации, отсутствия реальных задач) многие из этих схем были отвергнуты или забыты. Однако, начиная с конца ХХ века в связи с результатами исследований ученых, их достижениями в области аэродинамики, микроэлектроники, многокритериальных высокоточных малогабаритных систем навигации и управления, принципов организации систем связи с высокой скоростью передачи данных, а также новых способов съема и передачи информации с борта потребителю, стало возможным широкое внедрение беспилотных летательных аппаратов (БЛА), отличающихся универсальностью применения, низкой стоимостью производства и эксплуатации.
Одним из прикладных направлений в развитии таких технологий, является создание ветроустойчивых, безопасных в эксплуатации беспилотных летательных аппаратов вертикального взлета и посадки, способных выполнять посадку на воду и взлетать с воды. Поэтому летательные аппараты, имеющие дисковидную форму, снова привлекают к себе пристальное внимание, как военных, так и структуры хозяйственного комплекса страны.
Цель выполнения разработки – определение облика ветроустойчивого беспилотного летательного аппарата вертикального взлета и посадки (БЛА ВВП), c возможностью его эксплуатации на водной поверхности, оснащенного тяговыми агрегатами, расположенными в корпусе аппарата, с обдуваемой на основе реализации эффекта «Коанда», внешней линзообразной поверхностью.
Основные требования к аппарату в рамках решаемых задач
• относительная компактность;
• безопасность эксплуатации для окружающих;
• ветроустойчивость;
• компоновка, обеспечивающая взлет и посадку с водной поверхности;
• защищенность силовой установки от потоков и брызг воды;
• отсутствие низкочастотных вибраций;
• минимальные затраты на выполнение основных задач
Предшествующий опыт
Недостатки, свойственные ЛА дисковидной формы (неустойчивость по углам рыскания и тангажа, большое индуктивное сопротивление), отмечались ранее при их испытаниях, проводившихся в различных странах (например – сфероплан Уфимцева, Россия, 1910-1911 гг; самолет зонтик, США, 1911г; Aka Dirigiplane, США, 1933г; Scimmer V-173, США, 1938-1948 гг; Фоке-Вульф 500, Курта Танка, Германия 1941-1945 гг; летающий блин Цимермана, Германия, 1942 гг; «Дископлан – 1», Россия, 1950г.; NS-97, Дика Стасиноса, Nortrop, США, 1950 г.; Avrokar VZ9-AV и его модификации, Канада, 1952-1961 гг; RS-360, Rene Couzinet, Франция, 1952 г; самолет Ляхова, Россия, 1961г; различные проекты Moller Skycar, Moller, США, 1962-1990 гг; дисколет Павлова, Россия, 1996 г; Cypfer и его модификации, Sicosky, США, 1992-1998 г; и мн. др.). Результаты таких испытаний приводили к последующему, очень осторожному подходу к выбору схемы дисковидного летательного аппарата.
С точки зрения аэродинамики, поведение дисковидных аппаратов характеризуются, тем, что у большинства из них в нижней части корпуса положение зон повышенного давления крайне неустойчиво. При наличии бокового обдува (в горизонтальном полете) они могут чередоваться с зонами отрицательного давления, которое вызывало возникновение соответствующих сил с обратным знаком по отношению к вектору подъемной силы. Это в свою очередь, приводило к тому, что аппарат дисковидной компоновки становился трудно управляемым и склонным к опрокидыванию, приводя к не всегда возможному устранению такого недостатка. Данный факт являлся причиной закрытия ряда программ работ по их разработке и испытаниям.
Современное состояние разработок
За рубежом имеется и широко эксплуатируется множество конструкций различных БЛА ВВП. Однако, как показывает анализ, все они, как правило, построены по традиционной одно или многовинтовой вертолётной схеме, у которой подъёмная сила создаётся только тягой несущего винта (винтов).
Такая традиционность приводит к тому, что характеристики подобных БЛА, их достоинства и недостатки схожи с характеристиками и недостатками полномасштабных – пилотируемых аппаратов, и не позволяет, в рамках существующих подходов, решить задачи улучшения ветроустойчивости, безопасности эксплуатации и ряда других существенных свойств. Поэтому, в связи с необходимостью расширения рынка применения беспилотной техники, в частности за счёт повышения ветроустойчивости БЛА, наделения их возможностями взлета с воды и посадки на воду, для аппаратов перспективных концептуальных схем, все чаще рассматриваются нетрадиционные способы создания подъёмной силы.
Одним из таких способов, можно считать способ, в котором результирующая подъёмная сила создаётся не только за счёт тяги несущих винтов, но и за счёт силы возникающей при внутреннем или наружном обтекании воздухом корпуса летательного аппарата (аппараты фирмы АЕSIR, Англия; VZ-9 Avrocar и его модификации, Канада; БЛА «Ходер», Англия; ЭКИП, Россия; ЛА Д. Джонсона, США и т.д.).
Считается, что подобные схемы, во множестве испытанные и изученные в середине прошлого века применительно к пилотируемой авиации, могут существенно улучшить характеристики и безопасность БЛА среднего, малого и мини классов (с массой до 50 кг), а также разнообразить возможности их применения.
В результате проведенных научно-исследовательских работ учеными С.-Петербурга [1] было выяснено, что наилучшими прибавками к тяге отличаются те аппараты, обдув которых происходит в их нижней части.
Исследования также, показали, что величина прибавки к тяге может достигать до 100 и более процентов тяги основных тяговых агрегатов.
Предлагаемое решение
Как известно, в связи с расширением сферы применения БЛА, охватом труднодоступных зон хозяйствования, выполнение ряда задач посредством силы тяги несущих винтов аппаратов реализованных по традиционным схемам (вертолет, мультикоптер), уже не удовлетворяют их качеству выполнения и требованиям безопасности. Причиной этому является низкое значение КПД ~ 0.22–0.35 и незащищенность средств создания подъемной силы (тяги) вышеупомянутой техники.
Попыткой устранения указанных недостатков является настоящая работа. Она предполагает рассмотрение БПЛА, у которого подъемная сила создается комбинированным способом, сочетающим центростремительное расширение потока воздуха выходящего из нескольких сопел под корпусом аппарата с одновременным обдувом верхней линзообразной поверхности двойной кривизны, выполненной в соответствии с математическим описанием поверхности «Коанда», над которой, в результате разряжения возникает подъемная сила.
Предлагаемая компоновка аппарата предусматривает, что центробежные агрегаты, обеспечивающие вертикальную тягу, равномерно расположены на периферии, внутри дисковидного корпуса аппарата. Одновременно, внутри каждого из центробежных агрегатов, вращается центробежный вентилятор, который попарно, с противоположнорасположенным ему вентилятором, вращается в противоположном направлении, обеспечивая разгон потока с центростремительным расширением на выходе из сопла. Другой центробежный нагнетатель, расположенный в центральной части аппарата, установлен коаксиально с зазором к внешней поверхности наружного дисковидного корпуса. Он обеспечивает разгон и сжатие потока с изменением направления от осевого к радиальному вдоль поверхности «Коанда».
Новизна предлагаемых решений
В физической основе природы образования подъемной силы рассматриваемого аппарата лежит комбинированный способ создания подъёмной силы, которая является суммой подъёмных сил.
1. Сил создаваемых центростремительным расширением потока воздуха от центробежных агрегатов.
2. Сил возникающих при обтекании воздухом конусовидных стекателей центробежных агрегатов.
3. Сил, возникающих при использовании эффекта «Коанда» в результате обтекании верхней поверхности дисковидного корпуса БПЛА ВВП.
На сегодня предложено множество как отечественных так и зарубежных схем осесимметричных ЛА дискообразной формы (см.http://rexresearch.com/wingless/wingless.htm ).
Все они могут быть разделены на следующие три группы:
– ЛА, у которых подъёмная сила создаётся разряжением над верхней поверхностью аппарата, обеспечиваемой, как правило, за счёт эффекта «Коанда» (см.US Patent 6073881, 6073882, 5803199, 3697020, и т.д.);
– ЛА, у которых подъёмная сила обеспечивается повышенным давлением на нижней поверхности фюзеляжа, ее «наддувом» (см. БПЛА «Тайфун», Око 3; Россия);
– ЛА, у которых подъёмная сила обеспечивается обоими способами.
Создание подъёмной силы за счёт разряжения над верхней поверхностью ЛА ограничено по своей величине и сильно зависит от давления окружающей среды. Оно быстро падает с повышением высоты полёта. Поэтому для решения поставленных задач наиболее пригоден второй способ, который обеспечивает большее значения подъёмной силы, что и объясняет его преимущественное использование на летательных аппаратах экспериментального назначения.
Однако, как сказано выше, при «наддуве» нижней поверхности аппарата, крайне сложно добиться стабильности в распределении давления. Для устранения этого явления, предлагается на выходе из сопел центробежных агрегатов, расположенных в корпусе по его периферии, установить конусовидные стекатели, имеющие определенную форму. Они будут обтекаться потоком воздуха ускоряемого центробежными агрегатами, что позволит упорядочить общие потоки воздуха, нужным образом распределить зоны повышенного давления и как следствие, улучшить управляемость БЛА.
Патентный поиск и анализ конструкций дискообразных БЛА, разработанных ранее, показывает, что совокупность предлагаемых способов, для обеспечения сформулированных выше требований, в мировой практике пока не рассматривалась.
Описание конструкции аппарата
Универсальный летательный аппарат дисковидной компоновки (рис. 1, рис. 2), выполнен в виде герметичного дисковидного несущего корпуса 1, образованного верхней поверхностью 2, и нижней поверхностью 3.
Поверхность 2 сформирована в соответствии с математическим описанием поверхности «Коанда» и предназначена для создания подъемной силы аппарата. Аэродинамическая подъемная сила Y аппарата, является результатом обтекания поверхности 2 ускоренным, центробежным нагнетателем 4, воздушным потоком 5, который истекая из кольцевого сопла 6, над поверхностью 2, обдувает её, вызывая на ней падение давления.
Область повышенного давления на нижней поверхности 3 аппарата, как и вертикальная реактивная тяга, возникают в результате ускорения воздушных потоков 7 несколькими центробежными агрегатами 8, с последующим истечением и центростремительным расширением потоков 9 в кольцевых соплах 12. Каждый из центробежных агрегатов 8, установленных внутри дисковидного корпуса 1, заключен в специальный корпус 10, у которого на выходе, сформирован пространственный диффузор 11. Предварительно расширенные в диффузорах 11 потоки 9, направляются в кольцевые сопла 12, где происходит их окончательное центростремительное расширение и обтекание конусовидных стекателей 14. Конусовидные стекатели 14, со специальными поверхностями, выполненными по образующим в виде кривых второго порядка, установлены за центробежными агрегатами 8 по их осям, позволяют вместе с ними формировать удобообтекаемые тела. Обтекание поверхностей таких тел, с центростремительным расширением воздушного потока, в соответствии с результатами исследований, проведенными в г. С. Петербурге профессором Соколовым Е.И. и к.т.н. Ушаковым А.П. – дает возможность получать дополнительную тягу T1.
Проявление такого эффекта позволяет кроме упорядочивания общих потоков воздуха, нужным образом распределить зоны повышенного давления и, как следствие, повысить значение тяги Т с улучшением управляемости аппарата.
В качестве энергетической установки, аппарат может быть оснащен турбовальным силовым агрегатом со свободной турбиной, или электродвигателями 13 , которые вращают центробежный нагнетатель 4, и центробежные агрегаты 8 во взаимнопротивоположном направлении.
Центробежный нагнетатель 4 воздушного потока 5, на выходе воздуха из рабочего колеса, оснащен лопаточным диффузором 15, входным направляющим аппаратом лопаточного типа 16, профилированным корпусом 17 рабочего колеса, с обтекателем 18. Такая конструкция нагнетателя 4, позволяет иметь положительные характеристики обтекания, как его внешней поверхности, так и внутреннего проточного пространства. Направление вращения рабочих колес центробежных нагнетателей показано стрелками 19. Часть воздушного потока 5 от центробежного нагнетателя 4 отбирается по каналам 21 через диффузор 22 для обеспечения нормальной работы центробежных агрегатов 8.
Бортовая Система Автоматического Управления 20, воздействуя определенным образом на режимы работы центробежных нагнетателей 8, изменяет интенсивность расширения потоков воздушных струй 9 (наддува) под нижней поверхностью аппарата. Соответственно меняется интенсивность обдува конусовидных стекателей 14 центробежных агрегатов 8, которые расположены на определенном плече от оси аппарата, заставляя его изменять свое положение в пространстве относительно осей X; Y и Z, и его вектор перемещения. При этом продольное управление осуществляется путем изменения режимов работы передних и задних нагнетателей, которые создают поворотный момент вокруг оси OZ, обеспечивая пропульсивную силу в направлении вперед-назад по полету. Поперечное управление – путем изменения режимов работы левых и правых нагнетателей, что вызывает повороты вокруг оси OX, а путевое – путем дифференциального изменения режимов работы накрест расположенных нагнетателей, что вызывает повороты вокруг оси OY.
В целом, схема аппарата позволяет на всех режимах полета эффективно управлять им относительно всех осей в пространстве, по аналогии с управлением мультикоптерами.
Конусовидные стекатели 14 центробежных агрегатов 8 могут использоваться в качестве водоизмещающего средства обеспечения непотопляемости аппарата на плаву при выполнении взлета-посадки и решении задач с базированием на водной поверхности.
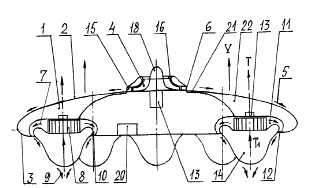
Рис. 1
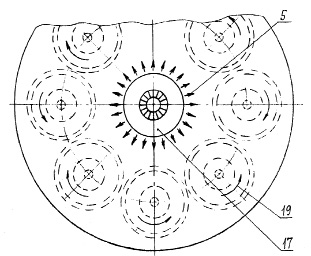
Рис. 2
Выводы
1. Дисковидная форма аппарата, используемая в данной разработке, обеспечит его компактность.
2. Малая площадь поперечного сечения, обеспечит хорошую ветроустойчивость.
3. Расположение тяговых агрегатов внутри корпуса, в его периферийной части, на определенном расстоянии от вертикальной оси аппарата, создаст возможность эффективного управления аппаратом в пространстве и обеспечит надежную защиту обслуживающего персонала от его вращающихся частей.
4. Использование конусовидных стекателей центробежных агрегатов в качестве водоизмещающих поплавков, удерживающих аппарат на водной поверхности – позволит ему выполнять безопасное приводнение и дежурство на плаву.
5. Аэродинамические особенности дисковидного крыла обеспечат стабильное положение при зависании и возможность парашютирования.
6. Обеспечиваемый технический результат проекта заключается в интеграции используемых аэродинамических эффектов и особенностей компоновки аппарата, которые позволяют придать новые свойства классу летательных аппаратов, выполненных по схеме «Летающая тарелка».
7. Одной из особенностей аппарата, является его возможность зависать и находиться некоторое время в зоне повышенных температур благодаря отводу большого количества тепла при центростремительном расширении выходящих струй воздуха в нижней части аппарата.
8. Создана концепция беспилотного летательного аппарата, универсального применения, способного работать в стесненных городских условиях.
Библиографическая ссылка
Воронков Ю.С., Воронков О.Ю., Ушаков А.П. ДИСКОВИДНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ-АМФИБИЯ // Международный журнал прикладных и фундаментальных исследований. 2016. № 1-3. С. 316-320;URL: https://applied-research.ru/ru/article/view?id=8501 (дата обращения: 01.07.2026).