

Постановка задачи при нестационарных волновых воздействиях
Обеспечение безопасности уникальных объектов при нестационарных волновых воздействиях является приоритетной задачей фундаментальной и прикладной науки.
В работах [1–10] приведена информация о постановке и численной реализации нестационарных волновых задач механики деформируемого твердого тела.
Для решения задачи о моделировании упругих волн в деформируемых областях сложной формы рассмотрим некоторое тело Г в прямоугольной декартовой системе координат XOY, которому в начальный момент времени t = 0 сообщается механическое воздействие. Предположим, что тело Г изготовлено из однородного изотропного материала, подчиняющегося упругому закону Гука при малых упругих деформациях.
Точные уравнения двумерной (плоское напряженное состояние) динамической теории упругости имеют вид
 ,
,
 ,
,  ,
,
 ,
,
 ,
,  ,
,
 ,
,  ,
,  ,
,
 , (1)
, (1)
где σx, σy и τxy – компоненты тензора упругих напряжений; εx, εy и γxy – компоненты тензора упругих деформаций; u и v – составляющие вектора упругих перемещений вдоль осей OX и OY соответственно; ρ – плотность материала;  – скорость продольной упругой волны;
– скорость продольной упругой волны;  – скорость поперечной упругой волны; ν – коэффициент Пуассона; E – модуль упругости;
– скорость поперечной упругой волны; ν – коэффициент Пуассона; E – модуль упругости;  – граничный контур тела Г.
– граничный контур тела Г.
Систему (1) в области, занимаемой телом Г, следует интегрировать при начальных и граничных условиях.
В работах [2–4, 6, 9–10] приведена информация о моделировании нестационарных волн напряжений в деформируемых объектах при нестационарных сейсмических воздействиях с помощью разработанного численного метода, алгоритма и комплекса программ.
Разработка методики и алгоритма
Для решения двумерной нестационарной динамической задачи математической теории упругости с начальными и граничными условиями (1) используем метод конечных элементов в перемещениях.
Принимая во внимание определение матрицы жесткости, вектора инерции и вектора внешних сил для тела Г, записываем приближенное значение уравнения движения в теории упругости
 ,
,  ,
,  , (2)
, (2)
где  – диагональная матрица инерции;
– диагональная матрица инерции;  – матрица жесткости;
– матрица жесткости;  – вектор узловых упругих перемещений;
– вектор узловых упругих перемещений;  – вектор узловых упругих скоростей перемещений;
– вектор узловых упругих скоростей перемещений;  – вектор узловых упругих ускорений;
– вектор узловых упругих ускорений;  – вектор внешних узловых упругих сил.
– вектор внешних узловых упругих сил.
Интегрируя уравнение (2) конечноэлементным вариантом метода Галеркина, получим явную двухслойную конечноэлементную линейную схему в перемещениях для внутренних и граничных узловых точек
 ,
,
 . (3)
. (3)
Шаг по временной переменной координате ?t выбирается из следующего соотношения

 , (4)
, (4)
где ?l – длина стороны конечного элемента.
На основе метода конечных элементов в перемещениях разработана методика, разработан алгоритм и составлен комплекс программ для решения двумерных линейных и нелинейных задач при различных начальных и граничных условиях, для областей сложной формы. Комплексы программ написаны на алгоритмическом языке Фортран-90.
В работах [5, 7–8] приведена информация о физической достоверности и математической точности в области моделирования нестационарных волн напряжений в областях различной формы с помощью рассматриваемого метода.
Решение задач о сейсмических волнах в полуплоскости с полостью и без полости
В работе рассматриваются технические средства в виде вертикальных полостей для управления сейсмических напряженным состоянием исследуемых объектов. Приводится некоторая информация в области постановки задач с полостью и без полости.
Расчеты проводились при следующих единицах измерения: килограмм-сила (кгс); сантиметр (см); секунда (с). Для перехода в другие единицы измерения были приняты следующие допущения: 1 кгс/см2 ≈ 0,1 МПа; 1 кгс с2/см4 ≈ 109 кг/м3.
1. Рассмотрим задачу о воздействии плоской продольной сейсмической волны (рис. 2) параллельной свободной поверхности упругой полуплоскости без полости (рис. 1).
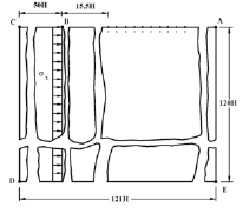
Рис. 1. Постановка задачи о воздействии плоской продольной сейсмической волны параллельной свободной поверхности упругой полуплоскости без полости
От точки B параллельно свободной поверхности ABC приложено нормальное напряжение σx, которое при 0 ≤ n ≤ 10 ( ) изменяется линейно от 0 до P, а при n ≥ 10 равно P (P = σ0, σ0 = 0,1 МПа (1 кгс/см2)). Граничные условия для контура CDEA при t > 0
) изменяется линейно от 0 до P, а при n ≥ 10 равно P (P = σ0, σ0 = 0,1 МПа (1 кгс/см2)). Граничные условия для контура CDEA при t > 0  . Отраженные волны от контура CDEA не доходят до исследуемых точек при 0 ≤ n ≤ 200. Контур ABC свободен от нагрузок, кроме точки B.
. Отраженные волны от контура CDEA не доходят до исследуемых точек при 0 ≤ n ≤ 200. Контур ABC свободен от нагрузок, кроме точки B.
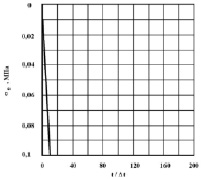
Рис. 2. Воздействие типа функции Хевисайда
Расчеты проведены при следующих исходных данных:  ; ?t = 1,393?10-6 с; E = 3,15?104 МПа (3,15?105 кгс/см2); ν = 0,2; ρ = 0,255?104 кг/м3 (0,255?10-5 кгс?с2 /см4); Cp = 3587 м/с; Cs = 2269 м/с. Исследуемая расчетная область имеет 14762 узловых точек и 14520 конечных элементов. Решается система уравнений из 59048 неизвестных. В характерных областях исследуемой задачи получены контурные напряжения и компоненты тензора напряжений.
; ?t = 1,393?10-6 с; E = 3,15?104 МПа (3,15?105 кгс/см2); ν = 0,2; ρ = 0,255?104 кг/м3 (0,255?10-5 кгс?с2 /см4); Cp = 3587 м/с; Cs = 2269 м/с. Исследуемая расчетная область имеет 14762 узловых точек и 14520 конечных элементов. Решается система уравнений из 59048 неизвестных. В характерных областях исследуемой задачи получены контурные напряжения и компоненты тензора напряжений.
2. Рассмотрим задачу о воздействии плоской продольной сейсмической волны (рис. 2) параллельной свободной поверхности упругой полуплоскости с полостью (соотношение ширины к высоте один к четырем) (рис. 3). От точки F параллельно свободной поверхности ABEFG приложено нормальное напряжение σx, которое при 0 ≤ n ≤ 10 ( ) изменяется линейно от 0 до P, а при n ≥ 10 равно P (P = σ0, σ0 = 0,1 МПа (1 кгс/см2)).
) изменяется линейно от 0 до P, а при n ≥ 10 равно P (P = σ0, σ0 = 0,1 МПа (1 кгс/см2)).
Граничные условия для контура GHIA при t > 0  . Отраженные волны от контура GHIA не доходят до исследуемых точек при 0 ≤ n ≤ 200. Контур ABCDEFG свободен от нагрузок, кроме точки F. Расчеты проведены при следующих исходных данных:
. Отраженные волны от контура GHIA не доходят до исследуемых точек при 0 ≤ n ≤ 200. Контур ABCDEFG свободен от нагрузок, кроме точки F. Расчеты проведены при следующих исходных данных:  ; ?t = 1,393× ×10-6 с; E = 3,15?104 МПа (3,15?105 кгс/см2); ν = 0,2; ρ = 0,255?104 кг/м3 (0,255?10-5 кгс× ×с2 /см4); Cp = 3587 м/с; Cs = 2269 м/с. Исследуемая расчетная область имеет 14762 узловых точек и 14516 конечных элементов. Решается система уравнений из 59048 неизвестных. В характерных областях исследуемой задачи получены контурные напряжения и компоненты тензора напряжений.
; ?t = 1,393× ×10-6 с; E = 3,15?104 МПа (3,15?105 кгс/см2); ν = 0,2; ρ = 0,255?104 кг/м3 (0,255?10-5 кгс× ×с2 /см4); Cp = 3587 м/с; Cs = 2269 м/с. Исследуемая расчетная область имеет 14762 узловых точек и 14516 конечных элементов. Решается система уравнений из 59048 неизвестных. В характерных областях исследуемой задачи получены контурные напряжения и компоненты тензора напряжений.
3. Рассмотрим задачу о воздействии плоской продольной сейсмической волны (рис. 2) параллельной свободной поверхности упругой полуплоскости с полостью (соотношение ширины к высоте один к восьми) (рис. 4). От точки F параллельно свободной поверхности ABEFG приложено нормальное напряжение σx, которое при 0 ≤ n ≤ 10 ( ) изменяется линейно от 0 до P, а при n ≥ 10 равно P (P = σ0, σ0 = 0,1 МПа (1 кгс/см2)). Граничные условия для контура GHIA при t > 0
) изменяется линейно от 0 до P, а при n ≥ 10 равно P (P = σ0, σ0 = 0,1 МПа (1 кгс/см2)). Граничные условия для контура GHIA при t > 0  . Отраженные волны от контура GHIA не доходят до исследуемых точек при 0 ≤ n ≤ 200. Контур ABCDEFG свободен от нагрузок, кроме точки F.
. Отраженные волны от контура GHIA не доходят до исследуемых точек при 0 ≤ n ≤ 200. Контур ABCDEFG свободен от нагрузок, кроме точки F.
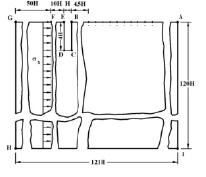
Рис. 3. Постановка задачи о воздействии плоской продольной сейсмической волны на упругую полуплоскость с полостью (соотношение ширины к высоте один к четырем)
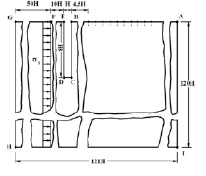
Рис. 4. Постановка задачи о воздействии плоской продольной сейсмической волны на упругую полуплоскость с полостью (соотношение ширины к высоте один к восьми)
Расчеты проведены при следующих исходных данных:  ; ?t = 1,393?10-6 с; E = 3,15?104 МПа (3,15?105 кгс/см2); ν = 0,2; ρ = 0,255?104 кг/м3 (0,255?10-5 кгс?с2 /см4); Cp = 3587 м/с; Cs = 2269 м/с. Исследуемая расчетная область имеет 14762 узловых точек и 14512 конечных элементов. Решается система уравнений из 59048 неизвестных.
; ?t = 1,393?10-6 с; E = 3,15?104 МПа (3,15?105 кгс/см2); ν = 0,2; ρ = 0,255?104 кг/м3 (0,255?10-5 кгс?с2 /см4); Cp = 3587 м/с; Cs = 2269 м/с. Исследуемая расчетная область имеет 14762 узловых точек и 14512 конечных элементов. Решается система уравнений из 59048 неизвестных.
4. Рассмотрим задачу о воздействии плоской продольной сейсмической волны (рис. 2) параллельной свободной поверхности упругой полуплоскости с полостью (соотношение ширины к высоте один к двенадцати) (рис. 5). От точки F параллельно свободной поверхности ABEFG приложено нормальное напряжение σx, которое при 0 ≤ n ≤ 10 ( ) изменяется линейно от 0 до P, а при n ≥ 10 равно P (P = σ0, σ0 = 0,1 МПа (1 кгс/см2)). Граничные условия для контура GHIA при t > 0
) изменяется линейно от 0 до P, а при n ≥ 10 равно P (P = σ0, σ0 = 0,1 МПа (1 кгс/см2)). Граничные условия для контура GHIA при t > 0  . Отраженные волны от контура GHIA не доходят до исследуемых точек при 0 ≤ n ≤ 200. Контур ABCDEFG свободен от нагрузок, кроме точки F. Расчеты проведены при следующих исходных данных:
. Отраженные волны от контура GHIA не доходят до исследуемых точек при 0 ≤ n ≤ 200. Контур ABCDEFG свободен от нагрузок, кроме точки F. Расчеты проведены при следующих исходных данных:  ; ?t = 1,393?10-6 с; E = 3,15?104 МПа (3,15?105 кгс/см2); ν = 0,2; ρ = 0,255?104 кг/м3 (0,255?10-5 кгс?с2/см4); Cp = 3587 м/с; Cs = 2269 м/с. Исследуемая расчетная область имеет 14762 узловых точек и 14508 конечных элементов. Решается система уравнений из 59048 неизвестных.
; ?t = 1,393?10-6 с; E = 3,15?104 МПа (3,15?105 кгс/см2); ν = 0,2; ρ = 0,255?104 кг/м3 (0,255?10-5 кгс?с2/см4); Cp = 3587 м/с; Cs = 2269 м/с. Исследуемая расчетная область имеет 14762 узловых точек и 14508 конечных элементов. Решается система уравнений из 59048 неизвестных.
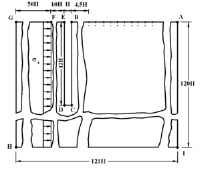
Рис. 5. Постановка задачи о воздействии плоской продольной сейсмической волны на упругую полуплоскость с полостью (соотношение ширины к высоте один к двенадцати)
Выводы
Полученные результаты можно оценить как первое приближение к решению сложной комплексной задачи, о применении полостей для увеличения безопасности различных сооружений при нестационарных волновых сейсмических воздействиях, с помощью численного моделирования волновых уравнений теории упругости.
Библиографическая ссылка
Мусаев В.К. МОДЕЛИРОВАНИЕ НЕСТАЦИОНАРНЫХ УПРУГИХ ДИНАМИЧЕСКИХ НАПРЯЖЕНИЙ В ПОЛУПЛОСКОСТИ БЕЗ ПОЛОСТИ И С ПОЛОСТЬЮ С ПОМОЩЬЮ ВОЛНОВОЙ ТЕОРИИ СЕЙСМИЧЕСКОЙ БЕЗОПАСНОСТИ // Международный журнал прикладных и фундаментальных исследований. 2016. № 3-2. С. 227-231;URL: https://applied-research.ru/ru/article/view?id=8706 (дата обращения: 16.06.2026).