

Морские и океанские просторы всегда заставляют быть в готовности к выполнению задач по ликвидации последствий морских происшествий, проведению операций по спасению пострадавших, в том числе и с применением морской авиации. Такие события носят случайный характер по месту и времени, следовательно, полеты на их выполнение можно классифицировать как нерегулярные с посадкой на необорудованную акваторию. Это полностью автономные полеты, выполняемые без средств обеспечения в местах посадки и последующих взлетов. При выполнении поисковых и спасательных задач с посадкой на необорудованную акваторию должны быть обеспечены соответствующая подготовка экипажа к полетам с водной поверхности и наличие специального снаряжения.
Полеты на необорудованные акватории являются наиболее сложными, требующими высокой профессиональной подготовки летного состава, высокого уровня технического состояния самолета, привлечения дополнительных сил и средств для обеспечения безопасности полетов.
Как видим, полеты гидроавиации в условиях ликвидации последствий чрезвычайных ситуаций – весьма затратные, связанные с определенным риском. Следовательно, есть необходимость проводить поисковые работы с целью выхода на новые технические решения, снижающие подобные риски и затраты.
Цель исследования. Возможность создания компактного убираемо-выпускного устройства, содержащего гиростабилизированную платформу со встроенными в неё телевизионными, тепловизионными камерами и прожектором, обеспечивающими днем и ночью достаточно широкую зону просмотра водной поверхности, при проведении поисковых работ и осуществлении эвакуации пострадавших на борт самолета-амфибии, находящегося на плаву.
Основные требования к исследуемому объекту
Предусмотреть конструктивные возможности выпуска и уборки приемной аппаратуры обзорно-поисковой системы через открытый герметизируемый люк самолета – амфибии.
Обеспечить максимальную жесткость конструкции и минимальные люфты, в подвижных соединениях убираемо-выпускного устройства, несущего приемную аппаратуру обзорно-поисковой системы.
С целью уменьшения влияния морских волнений на точность позиционирования обзорно-поисковой системы, предусмотреть оптимальный разнос точек опоры убираемо-выпускного устройства по осям X и Z в местах его подвижного контакта с элементами конструкции лодки-фюзеляжа.
Обеспечить в походном положении возможность уборки аппаратуры обзорно-поисковой системы внутрь специальной ниши лодки-фюзеляжа самолета.
При базировании самолета – амфибии на водной поверхности в сложных метеоусловиях и полетах на малой высоте, в составе обзорно-поисковой системы предусмотреть возможность автоматизированного управления выпуском, уборкой установки, а также процессами съема и передачи информации (с возможностью переключения на ручное управление экипажем).
Общая концепция предлагаемого технического решения
Рассматриваемое техническое решение предполагает его использование на летательных аппаратах, или судах осуществляющих поисково-спасательные операции с применением электронных средств и освещения акватории прожекторами. Эти средства сформированы в компактные устройства, которые выдвигаются через люки без помехи свободному входу и выходу экипажа. Конструкция выдвигаемых устройств предполагает невозможность нарушения ими обшивки и обводов люка с сохранением возможности его герметизации.
Обзорно-поисковая система (Выпускная телетепловизионная система с прожектором) структурно представляют собой панорамную систему, в которую входят: оптико-электронный блок (ОЭБ) с размещенными в нем объективами, телевизионными и тепловизионными камерами, электронный блок (ЭБ), система видеорегистрации (СВР) и прожектор (П).
Выпускная телетепловизионная система с прожектором работает следующим образом.
Три телевизионные и три тепловизионные камеры формируют изображения окружающего пространства. Видеосигналы с этих камер поступают в электронный блок (ЭБ). Там осуществляется процедура совмещения (режим «Сшивки») видеоизображения от трех камер, соединяя их в широкоугольное изображение (режим «Панорама») и формируется поле зрения виртуальной камеры (режим «Окно»). В режиме «Окно» на экране индикатора отображается поле зрения виртуальной камеры, которое может перемещаться в пределах широкоугольного поля зрения. Перемещение (наведение) поля зрения виртуальной камеры (линии визирования) в пределах широкоугольного поля зрения производится за счет электронного (бескинематического) наведения линии визирования по сигналам от рукоятки управления (джойстика). Если оператор обнаружил в широкоугольном поле зрения заинтересовавший его объект, он с помощью джойстика наводит линию визирования на этот объект и переходит в режим «Окно». В результате этого действия на экране индикатора отображается поле зрения с увеличенным масштабом, что позволяет детально рассмотреть изображение выбранного объекта или участка водной поверхности. С целью более детального рассмотрения объекта имеется возможность включения электронного увеличения 2х, что позволяет масштабировать изображение в его центральной части с увеличением еще в 2 раза.
В зависимости от задач мониторинга, оператор имеет возможность наблюдать за объектом по его тепловому излучению и видеоизображениям. В ночных условиях, обнаруженный объект, или участок водного пространства, может быть освещен лучом холодного света, создаваемого прожектором, установленным на той же гиростабилизированной платформе. Наведение прожектора на искомый объект, обеспечивается зафиксированным тепловым излучением объекта и его телевизионным изображением.
Выпускная телетепловизионная система с прожектором имеет следующие отличия от известных бортовых систем технического зрения:
– широкий угол обзора в горизонтальной плоскости (более 120°), обеспечивающий большой захват водного пространства в горизонтальной плоскости днем и ночью;
– электронное (бескинематическое) наведение линии визирования в пределах поля зрения с выдачей информации в цифровом виде о координатах линии визирования;
– совмещение телевизионного и тепловизионного изображений, с возможностью их освещения; расширяющее пределы возможностей по дальности обнаружения объектов.
– улучшение качества съема видеоинформации сформированной телевизионными и тепловизионными каналами при слабой контрастности изображений, низкой заметности объектов, и условиях плохой видимости создаваемых морской непогодой, туманом, пылью, дымом, дождем, снегом;
– возможность регистрации видео, аудио и служебной информации на сменные накопители с удобством просмотра видеоинформации на борту самолета-амфибии;
возможность комплексирования с бортовой радиолокационной станцией, навигационным комплексом, системой спутниковой навигации и другими системами самолета-амфибии.
Описание и работа установки обзорно-поисковой системы
Устройство и работа установки обеспечивающей выпуск и уборку датчиков обзорно-поисковой системы, сканирование ими пространства, поясняется чертежами:
- на рис. 1 изображен вид на левый борт с выпущенной обзорно-поисковой системой;
- на рис. 2 – вид А на выпущенную обзорно-поисковую систему;
- на рис. 3 – вид на левый борт с убранной обзорно-поисковой системой;
- на рис. 4 – вид сверху на выпущенную обзорно-поисковую систему.
Обзорно-поисковая система для спасательного самолета-амфибии (рис. 1, 2, 3, 4), размещена на выдвижной штанге, выполненной в виде телескопического гидроцилиндра 1. На вершине внутреннего штока 2 гидроцилиндра 1, соосно с ним, посредством двухстепенного шарнира 3 установлена гиростабилизированная платформа 4, которая имеет встроенные телевизионные 5, тепловизионные 6 камеры и прожектор холодного света 7. Средняя часть наружного корпуса телескопического гидроцилиндра 1, в вертикальном положении, жестко закреплена в стакане 8 горизонтально расположенной рамы 9. Рама 9 (Рис. 4) имеет увеличенную базу по осям X и Z. По боковым сторонам (оси X) рамы 9 установлены ролики 10, которые охватывают направляющие 11, закрепленные в конструкции лодки-фюзеляжа 12. Рама 9 имеет возможность, опираясь на ролики 10, выдвигаться из ниши 13 и обеспечивать вынос гидроцилиндра 1 с гиростабилизированной платформой 4, в пространство ограниченное окантовкой люка 14 и фиксироваться в «рабочем» положении электрозамками 15.
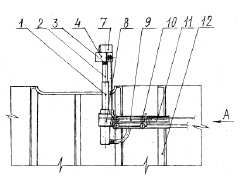
Рис. 1
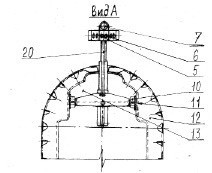
Рис. 2
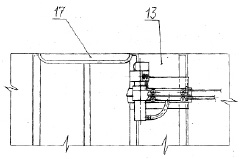
Рис. 3
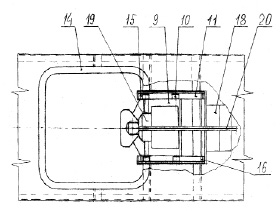
Рис. 4
В убранном (походном) положении (рис. 3) рама 9 с гидроцилиндром 1, телетепловизионной системой 5, 6 и прожектором 7 находятся в нише 13 лодки – фюзеляжа 12 и фиксируются специальными электрозамками 16. Такое расположение телетепловизионной системы 5, 6 с прожектором 7, полностью освобождает весь проем люка 17 и не препятствует выходу и входу членов экипажа при эксплуатации самолета – амфибии или в аварийной ситуации. Оно, также, не создает препятствий закрытию и герметизации люка 17, поскольку горизонтальное выкатывание установки из ниши 13 по направляющим 11 и его уборка связаны с положением люка 17 специальной электрической блокировкой.
Для перевода телетепловизионной системы 5, 6, 7 из походного положения в рабочее, оператор дает команду системе автоматизированного управления установкой (САУ) 18 посредством сигнала с пульта. Сигнал обеспечивает разгерметизацию и дистанционное открытие люка 17, а также, включение электропривода 19. Под действием вращения электропривода 19, рама 9 выдвигается из ниши 13 до упоров электрозамков 15, позволяя гидроцилиндру 1 с гиростабилизированной платформой 4 занять рабочее положение. После фиксации рамы 9 в «рабочем» положении, срабатывают клапаны впуска гидросмеси в телескопический гидроцилиндр 1, его звенья раздвигаются, и телетепловизионная система с прожектором 5, 6, 7 поднимается на высоту определяемую суммой ходов штоков телескопического гидроцилиндра 1. Двухстепенной шарнир 3 разблокируется и гиростабилизированная платформа 4 переводится в рабочее состояние. Соосное звено шарнира 3 при этом имеет возможность поворота вокруг вертикальной оси Y, обеспечивая тем самым сканирование пространства датчиками гиростабилизированной платформы 4 по направлению азимута. Горизонтальное звено шарнира 3, обеспечивает независимое от азимутального направления, сканирование пространства датчиками 5, 6 и прожектором 7 по углу a (высоте H).
В случае необходимости, оператор может занять место в проеме люка 17, перевести установку на ручное управление и осуществлять поиск, наведение или сопровождение спасательных судов в места разброса пострадавших. В ночное время обзорно-поисковая система обеспечивает проведение спасательных операций, в том числе, освещая прожектором 7 зоны эвакуации пострадавших и устранения последствий катастроф.
После завершения работы обзорно-поисковой системы с камерами и прожектором 5, 6, 7, по команде оператора, двухстепенной шарнир 3 блокирует гиростабилизированную платформу 4 в нужном, для уборки, положении. Обслуживающая установку гидросистема переключается на уборку звеньев телескопического гидроцилиндра 1, последовательно возвращая их в исходное положение. По мере завершения уборки звеньев гидроцилиндра 1, обзорно-поисковая система с камерами и прожектором 5, 6, 7 принимает габариты, которые позволяют приводу 19 переместить всё устройство на раме 9 в нишу 13 лодки – фюзеляжа 12 на свое место хранения «по-походному». Далее, дистанционно закрывается люк 17 и герметизируется. Все электрические и оптоэлектронные связи платформы 4 с бортовыми коммуникациями уложены в специальной гибкой складывающейся шине 20.
Выводы
Данная конструкция установки обзорно-поисковой системы на спасательном самолете-амфибии обеспечивает автоматизированный выпуск, уборку и хранение блока активных элементов технического зрения. Их хранение производится внутри лодки – фюзеляжа вне агрессивной морской среды и доступно для технического обслуживания в более комфортных условиях. Конструкция установки позволяет улучшить эксплуатационные свойства самолета – амфибии освобождением люка от механических элементов, препятствующих выходу членов экипажа, путем уборки обзорно-поисковой системы внутрь лодки-фюзеляжа, а также сократить время подготовки самолета-амфибии к повторному вылету.
Библиографическая ссылка
Воронков Ю.С., Воронков О.Ю. УСТАНОВКА ОБЗОРНО-ПОИСКОВОЙ СИСТЕМЫ НА СПАСАТЕЛЬНОМ САМОЛЕТЕ-АМФИБИИ // Международный журнал прикладных и фундаментальных исследований. 2016. № 8-1. С. 16-20;URL: https://applied-research.ru/ru/article/view?id=9914 (дата обращения: 01.07.2026).