

В последние годы ряд зарубежных фирм стали уделять повышенное внимание созданию беспилотных летательных аппаратов с использованием эффекта Коанда. Так Британская фирма AESIR создала целый ряд аппаратов: например Vidar массой 400 г, имеющий целевую нагрузку 100 г.; аппарат Odin массой 10 кг, при диаметре 1 м. имеющий целевую нагрузку 10 кг; аппарат Hoder при массе 1500 кг имеющий целевую нагрузку 1000 кг, который может находиться в полете до 8 часов.
Как следует из приведенных сведений, прослеживается довольно устойчивая тенденция к росту весовой отдачи данных аппаратов. Одним из основных их достоинств, является возможность изоляции воздушных нагнетателей от контактов и соударений с окружающими и посторонними предметами, включая обслуживающий техперсонал. Данная особенность таких аппаратов особенно важна при взлёте-посадке на ограниченные площадки, при полётах над застроенными территориями на малых высотах, а также, между верхушками деревьев.
Цель исследования
Рассмотрение возможности создания безопасного в эксплуатации воздушного транспортного средства, удовлетворяющего потребностям вертикального взлета и посадки на ограниченные площадки, обладающего амфибийными свойствами, обеспечивающими возможность его использования, как на суше, так и на воде, на льду, болотистой и заснеженной поверхности.
Основные задачи, решаемые при исследовании транспортного средства
-Первой задачей является создание аппарата наделенного свойствами выполнения вертикального взлета, зависания, вертикальной посадки, а также горизонтального полета в широком диапазоне скоростей, как в простых, так и в сложных метеоусловиях.
- Второй задачей является повышение эффективности использования несущих поверхностей аппарата, с установленными на них защищенными агрегатами, создающими подъемную силу и тягу,
- Третьей задачей является создание такого аппарата, который имел бы эффективные средства управления своим пространственным положением во всем диапазоне скоростей с реализацией возможности повышения надежности и безопасности полета.
- Четвертой задачей является создание такого аппарата, который был бы оснащен убираемыми в полете взлетно-посадочными устройствами, позволяющими его эксплуатировать со снега, льда, грунта, песка, водной и заболоченной поверхности.
Концептуальное решение, определяемое поставленными задачами
Поставленные задачи решаются в результате того, что летательный аппарат вертикального взлета и посадки, снабжен несущей поверхностью сформированной в соответствии с математическим описанием поверхности «Коанда». Такая поверхность омывается скоростным потоком воздуха, подведенным тангенциально от центробежных нагнетателей противоположного вращения. Каждая из групп центробежных нагнетателей содержит несколько нагнетателей, установленных тандемом по одной продольной оси параллельной оси аппарата. Управление аппаратом осуществляется отклонением подвижных элементов, расположенных в потоке воздуха, на переферии несущей поверхности. Внутренняя полость несущей поверхности содержит убираемые в полете и выпускаемые перед посадкой надувные взлетно-посадочные устройства.
Особенности предложенных решений в рамках поставленных задач
- Использование эффекта Коанда реализуемое путем обдува несущей поверхности скоростными потоками воздуха, выдуваемыми тангенциально из плоских сопел от центробежных нагнетателей противоположного вращения, обеспечивает возможность получения ламинарного потока на большой площади в безотрывном режиме обтекания.
- Подъемная сила, возникающая при использовании обдува несущей поверхности заданной площади, может обеспечить его вертикальный взлет, полет, зависание и посадку, а также быть достаточной при эксплуатации аппарата на неподготовленных площадках.
- Аппарат, в случае возможного отказа силовой установки, может совершить безаварийную посадку, обеспечиваемую тем, что его система управления силовыми установками выполнена по так называемой «диагональной» схеме. При отказе одной из силовых установок, выключается вторая, расположенная по диагонали напротив отказавшей. Работающие силовые установки переводятся в чрезвычайный режим, и производится аварийная посадка аппарата без повреждений.
Описание аппарата
Рассматриваемая концепция летательного аппарата с использованием эффекта Коанда иллюстрируется чертежами.
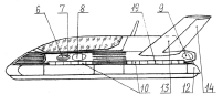
Рис. 1. Вид аппарата сбоку в полете и в состоянии покоя на земле
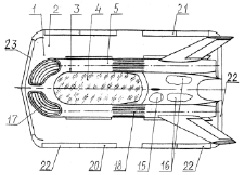
Рис. 2. Вид аппарата сверху
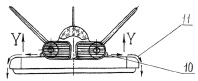
Рис. 3. Вид аппарата спереди в полете и в состоянии покоя на земле
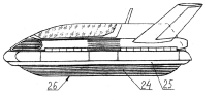
Рис. 4. Вид аппарата сбоку в момент посадки на поверхность, земли, воды т.д.
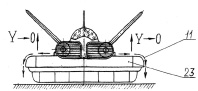
Рис. 5. Вид аппарата спереди в момент посадки на поверхность, земли, воды т.д.
Аппарат (рис. 1–5) состоит из платформы 1, выполненной из композитов, к которой приформована несущая поверхности 2. По оси симметрии несущей поверхности 2 размещена кабина экипажа и пассажиров 3, закрываемая ударопрочным синтетическим фонарем 4. По бокам кабины экипажа 3, параллельно оси симметрии аппарата, в ударопрочных кожухах 5, сечение которых выполнено в виде «улитки», размещены тандемом центробежные нагнетатели 6 с удлиненными рабочими колесами 7. Вращение центробежных нагнетателей 6 обеспечивается приводами 8 выполненными на основе высокоэффективных электродвигателей, запитанными от 2х турбогенераторов 9. В нижней части кожухов 5, тангенциально их поперечным сечениям размещены плоские сопла 10, по касательной направляющие потоки воздуха 11 на верхнюю поверхность 2 платформы.
Хвостовая часть платформы 12 снабжена «V» образным стреловидным оперением 13, обеспечивающим стабилизацию аппарата в его горизонтальном полете, оснащенным рулевыми поверхностями 14, которые обеспечивают управление аппаратом вокруг осей OZ и OY по тангажу и курсу. Эффективность рулевых поверхностей 14 достигается при наборе определенной горизонтальной скорости полета аппарата. За кабиной экипажа и пассажиров находится багажный отсек 15 и энергетический отсек 16. Забор и подача воздуха к центробежным нагнетателям 6 и турбогенераторам 9, производится через лобовые и боковые воздухозаборники 17, 18. Плоские сопла 10 оснащены поворотными направляющими лопатками 19, регулирующими направление и форму скоростной воздушной пелены.
Исполнительными органами управления аппаратом при вертикальном взлете, зависании, и вертикальной посадке, являются поверхности управления по крену 20, 21, а также носовые и хвостовые поверхности управления по тангажу 22. Все исполнительные органы управления размещены по краям несущей платформы 1. Соответствующее отклонение хвостовых поверхностей управления 22 обеспечивает их участие в создании пропульсивной силы аппарата и изменении её интенсивности. Носовая часть аппарата оснащена ударопоглощающим амортизатором 23. Убираемые пневматические надувные баллонеты 24, расположены в нижней части несущей платформы 1 и убираются в нишу силовой рамы 25. Снизу баллонеты 24 оснащены износостойкой подошвой 26.
Взлет аппарата, переход в горизонтальный полет, зависание, посадка
Перед взлетом аппарата с поверхности земли, его взлетно-посадочные устройства 24 находятся в убранном положении (рис. 1). Экипаж проверяет работоспособность всех систем и агрегатов, убедившись в их исправности, запускает турбогенераторы 9, которые обеспечивают электроэнергией бортовое оборудование, приводы центробежных нагнетателей 8 и обеспечивают заданное формообразование взлетно-посадочных устройств 24. Взлет аппарата выполняется после выхода всех центробежных нагнетателей 6 на взлетный режим. Постепенный рост мощности газотурбогенераторов 9, обеспечивает отрыв аппарата от поверхности земли с возможностью последующего набора безопасной высоты его полета. При этом отбрасываемый центробежными нагнетателями 6 воздушный поток 11, с большой скоростью вырывается из плоских сопел 10, и в соответствии с эффектом Коанда, движется безотрывно по криволинейной несущей поверхности 2, направляясь вниз. При обтекании скоростным потоком воздуха 11 верхней несущей поверхности аппарата 2, происходит падение давления в потоке 11. Снизу аппарата сохраняется атмосферное давление, и эта разница давлений, в соответствии с Законом Бернулли, выдавливает аппарат вверх, т.е. в сторону наименьшего давления. Так образуется подъемная сила аппарата Y. В горизонтальном полете, при достижении нормального обдува классических исполнительных органов управления 14 аппарата, он управляется как самолет.
Алгоритмы процесса управления взлетом, зависанием и горизонтальным полетом аппарата реализуются командами Бортовой Системы Автоматизированного Управления (БСАУ). В момент взлета, струи выхлопных газов турбогенераторов 9 по газовым коммуникациям отводятся вниз и их реакции являются дополнительной вертикальной тягой суммируемой с подъемной силой Y аппарата. На безопасной высоте БСАУ аппарата выдает команду силовым установкам на обеспечение потоком воздуха такой интенсивности, который способен удержать аппарат в режиме зависания. При этом соблюдается равенство сил и моментов, действующих на аппарат. Возмущающие факторы (например, ветер), стремящиеся вывести аппарат из равновесия, парируются отклонением исполнительных органов управления аппаратом 20, 21, 22.
До наступления эффективности действия исполнительных органов управления 14 в ручном, и автоматизированном режимах полета, система управления работает следующим образом.
Конфигурация «Взлет – зависание – посадка».
По крену. Крен влево – одновременное отклонение вверх правых носовых 20 и правых хвостовых 21 элеронов; крен вправо –одновременное отклонение вверх левых носовых 20 и левых хвостовых 21 элеронов;
По курсу. Поворот влево – одновременное отклонением правого носового 20 и левого хвостового 21 элеронов. Поворот вправо - одновременное отклонение левого носового 20 и правого хвостового 21 элеронов;
По тангажу. Кабрирование - одновременное отклонение пары носовых 22 поверхностей управления вверх. Пикирование – одновременное отклонение пары хвостовых 22 поверхностей управления вверх.
После зависания аппарата, происходит его разгон, обеспечиваемый отклонением газового потока заслонками в коммуникациях турбогенераторов 9. Заслонки плавно переводятся в положение, направляющее выхлопные газы турбогенераторов 9 в реактивные сопла. При этом поток газов обеспечивает пропульсивную силу аппарата. Под действием прямой реакции выхлопных газов турбогенераторов 9 и части воздушного потока 11, стекающего с хвостовой поверхности управления 22, аппарат разгоняется и движется в горизонтальном направлении на определенной высоте.
Посадка аппарата выполняется в обратной последовательности действий. Причем одной из особенностей аппарата, использующего подъемную силу на основе эффекта Коанда, является его способность создавать аэродинамическое торможение выходом на закритические углы атаки, без срыва потока воздуха. После такого маневра производится вертикальная посадка.
Взлетно-посадочные устройства
Взлетно-посадочными устройствами, позволяющими эксплуатировать аппарат со снега, льда, грунта, песка, водной и заболоченной поверхности, являются убираемые пневматические надувные баллонеты 24, закрепляемые в конструкции силовой рамы 25 платформы 1. Уборка и выпуск баллонетов 24 производится специальными гофроцилиндрами (не показаны). Гофроцилиндры, выполненные из полимеров, размещены равномерно внутри баллонета 24. Каждый из них, одним своим концом прикреплен к внутренней конструкции платформы 1, а другим концом к внутренней поверхности износостойкой подошвы 26 баллонета 24. Выпуск такого взлетно-посадочного устройства производится избыточным давлением воздуха, подаваемым в гофроцилиндры и непосредственно, очень малым давлением воздуха, внутрь баллонета, для обеспечения его устойчивого формообразования. Удельное давление такого аппарата на грунт, приближено к удельному давлению, оказываемому аппаратами на воздушной подушке. Уборка баллонета 24 производится ваккуумированием гофроцилиндров и выпуском воздуха из баллонета в атмосферу. Таким образом, баллонет 24, содержащий гофроцилиндры, воспринимает вертикально действующую нагрузку при совершении аппаратом посадки и дополнительных взлетно-посадочных средств не требует. При базировании аппарата на твердой поверхности, его взлетно-посадочные устройства находятся в убранном положении.
Выводы
Исследованиями возможности создания пилотируемого летательного аппарата, использующего для создания подъемной силы эффект Коанда установлено, что при заданной массе целевой нагрузки, определенной площади несущей поверхности и располагаемой мощности силовой установки, такой аппарат может быть создан. Сфера его применения довольно широка. Он может быть применен как для доставки рабочих бригад и грузов в труднодоступные низкотемпературные зоны, так и для поисково-спасательных работ. Аппарат является дополнением в арсенале технических средств для выполнения работ в труднодоступных зонах хозяйствования.
Библиографическая ссылка
Воронков Ю.С., Воронков О.Ю. ЛЕТАТЕЛЬНЫЙ АППАРАТ, ИСПОЛЬЗУЮЩИЙ ЭФФЕКТ КОАНДА // Международный журнал прикладных и фундаментальных исследований. 2016. № 7-5. С. 744-748;URL: https://applied-research.ru/ru/article/view?id=9953 (дата обращения: 14.07.2026).